
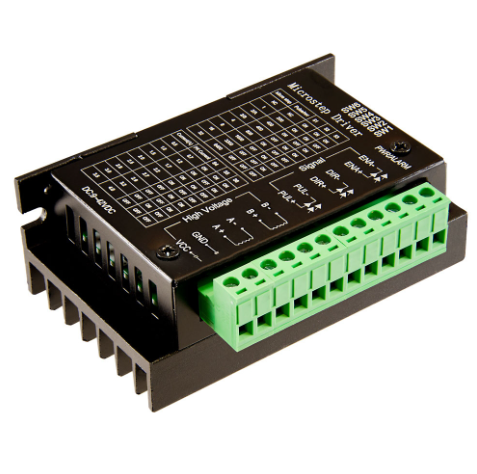
Описание
Драйвер TB6600 шагового двигателя модели — это контроллер нового поколения, который предназначен для построения различных систем ЧПУ. Он успешно функционирует с двигателями высокой мощности при больших нагрузках. Прибор имеет увеличенную рабочую частоту, напряжение 50 В, силу тока до 4 А и прирост выходной мощности до 200 Вт. Также добавлена схема защиты от перегрузок, что существенно увеличивает ресурс драйвера и приводов.
Преимущества контроллера TB6600
Изделие оснащено алюминиевым радиатором с возможностью установки на основание, что увеличивает коэффициент теплоотдачи и снижает риск перегрева прибора. Драйвер шагового двигателя купить можно в сочетании с приводами соответствующих параметров, что позволит создать эффективную систему ЧПУ на профессиональном уровне. Особенностью модели является функция интеллектуального управления параметрами тока и применение ШИМ модуляции, что позволяет регулировать показатели входящего в контроллер тока. Это обеспечивает возможность безопасного подключения шаговых двигателей с любым напряжением и мощностью. Кроме этого для устройства характерны:
- Минимальные габариты и малый вес (до 120 грамм)
- Широкий диапазон температуры эксплуатации до +45° С
- Высокая степень защиты от перегрузок;
- Надежность и большой ресурс работы;
- Высокая точность функционирования;
- Простой монтаж и возможность быстрой замены
- Универсальность контроллера;
- Доступная цена.
Характеристики
- Кол-во фаз: 2;
- Напряжение питания: 9 — 40 В постоянного тока;
- Максимальный выходной ток: 4 А;
- Шесть вариантов микрошага. Максимальное деление шага до 6400 шагов/оборот;
- Входные сигналы оптоизолтрованы высокоскоростными оптронами;
- Выполнен в закрытом корпусе;
- Встроенная тепловая защита;
- Защита от перегрузок по току.
Подключение
Драйвер имеет следующие выводы:
- VCC — подключение внешнего источника для питания ШД;
- GND —подключение Земли;
- A+ — подключение + первой обмотки ШД;
- A- — подключение — первой обмотки ШД;
- B+ — подключение + второй обмотки ШД;
- B- — подключение — второй обмотки ШД;
- PUL+ — вход сигнала STEP
- PUL- — выход сигнала STEP
- DIR+ — вход сигнала DIR
- DIR- — выход сигнала DIR
- ENA+ — вход сигнала ENABLE
- ENA- — выход сигнала ENABLE
Комплектация
- 1х Драйвер шагового двигателя TB6600;
Ссылки
- DataSheet;
Общие сведения:
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Например, ротор шагового двигателя 17HS1352-P4130, за один полный шаг, поворачивается на 1,8°. Значит для поворота ротора на 360° двигатель должен совершить 200 полных шагов.
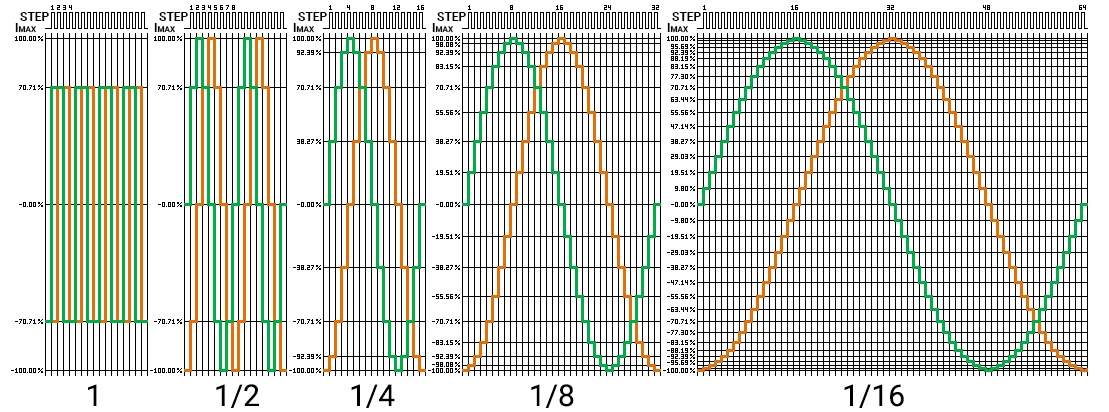
Для совершения одного полного шага на обмотки двигателя поступает серия сигналов от драйвера (как в полношаговом «1», так и в микрошаговых режимах «2», «4», «8», «16»).
С принципом работы шаговых двигателей можно ознакомиться в разделе Wiki — ШД.
Микрошаг:
Большинство драйверов позволяют разделить полный шаг двигателя на несколько микрошагов. Выбор микрошага устанавливается согласно таблице в инструкции к драйверу. В таблице указывается количество микрошагов на полный шаг «Microstep» (1/2/4/8/16/32/…) и/или количество тактов на полный оборот вала «Pulse/rev» (200/400/800/1600/3200/6400/…).
Если для целого поворота ротора двигателя в режиме 1 микрошаг на полный шаг требуется 200 тактов, то в режиме 4 микрошага на полный шаг, потребуется уже 800 тактов.
Чем больше микрошагов в полном шаге, тем точнее и плавнее поворачивается ротор шагового двигателя, но для поддержания той же скорости, требуется увеличивать частоту следования тактовых импульсов.
Ограничение тока фазы:
Большинство драйверов позволяют ограничить ток фазы (ток протекающий через обмотки двигателя). Выбор тока фазы осуществляется согласно таблице в инструкции к драйверу. В таблице указывается действующий ток «Current» и/или пиковый ток «PK Current». Чем выше ток, тем выше отдаваемый момент (сила двигателя).
Слишком большой ток приведёт к перегреву двигателя и может вызвать его поломку, а слишком маленький может привести к пропуску шагов, или нестабильному вращению ротора.
У некоторых драйверов ограничение тока осуществляется поворотом потенциометра.
Ток удержания:
Ток удержания это постоянный ток проходящий через обмотки двигателя, удерживающий вал в неподвижном состоянии. Некоторые драйверы позволяют снизить ток удержания.
Снижение тока удержания приводит к снижению нагрева двигателя при его удержании.
Силовые выводы драйвера:
Силовые выводы используются для подачи напряжения питания шагового двигателя и подключения его обмоток.
- Входы «VCC», «GND» / «+V», «GND» / «AC+», «AC-» — предназначены для получения напряжения питания шагового двигателя.
- Выводы «A+» и «A-» — предназначены для подключения первой обмотки шагового двигателя.
- Выводы «B+» и «B-» — предназначены для подключения второй обмотки шагового двигателя.
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Драйверы DM860H, DM556, TB6600 позволяют работать только с биполярными двигателями. Двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Сигналы управления STEP/DIR (PUL/DIR):
- Вход драйвера «STEP» (он же «PULSE») — предназначен для получения тактовых импульсов. За один импульс ротор двигателя поворачивается на один микрошаг. Вход может работать по фронту или спаду импульса. Чем выше частота импульсов, тем выше скорость вращения ротора.
- Вход драйвера «DIR» — предназначен для выбора направления вращения двигателя («0» — в одну сторону, «1» — в другую сторону). Смена состояния вывода «DIR» должна осуществляться при отсутствии импульсов на выводе «STEP».
- Вход драйвера «ENABLE» — разрешает работу двигателя. У большинства драйверов данный вход является инверсным, работа двигателя разрешена при отсутствии напряжения на входе. Некоторые драйверы позволяют вообще не подключать этот вход. Если работа двигателя запрещена, то его обмотки электрически отключаются и вал двигателя не удерживается.
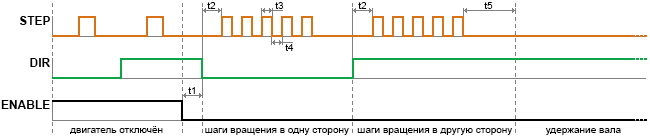
- Двигатель отключён если на входе «ENABLE» есть напряжение.
Сигналы на входах «STEP» и «DIR» игнорируются драйвером. Вал двигателя освобождён. - Вал поворачивается на один микрошаг с каждым импульсом на входе «STEP», при условии что на входе «ENABLE» нет напряжения.
Направление поворота вала зависит от состояния на входе «DIR». - Вал двигателя удерживается в неподвижном состоянии если на входе «ENABLE» нет напряжения и на вход «STEP» не подаются импульсы.
- t1: После снятия напряжения со входа «ENABLE» должно пройти не менее 5мкс до изменения уровня на входе «STEP» или «DIR».
- t2: После изменения состояния на входе «DIR» должно пройти не менее 5мкс до подачи импульса на вход «STEP».
- t3, t4: Длительность импульса или паузы на входе «STEP» не должна быть меньше 2,5мкс.
- t5: Автоматическое снижение тока удержания происходит через 1-2 сек после подачи последнего импульса на вход «STEP». Время зависит от типа драйвера.
Сигналы управления CW/CCW:
(Данные сигналы не поддерживаются драйверами DM860H, DM556, TB6600)
- Вход драйвера «CW» — предназначен для получения тактовых импульсов. За один импульс ротор двигателя поворачивается на один микрошаг. Вход может работать по фронту или спаду импульса. Чем выше частота импульсов, тем выше скорость вращения ротора.
- Вход драйвера «CCW» — выполняет те же действия что и вход «CW», но ротор двигателя поворачивается в другую сторону.
- Вход драйвера «ENABLE» — разрешает работу двигателя. У большинства драйверов данный вход является инверсным, работа двигателя разрешена при отсутствии напряжения на входе. Некоторые драйверы позволяют вообще не подключать этот вход. Если работа двигателя запрещена, то его обмотки электрически отключаются и вал двигателя не удерживается.
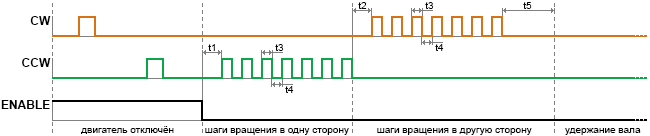
- Двигатель отключён если на входе «ENABLE» есть напряжение.
Сигналы на входах «CW» и «CCW» игнорируются драйвером. Вал двигателя освобождён. - Вал поворачивается на один микрошаг с каждым импульсом на входе «CW» или «CCW», при условии что на входе «ENABLE» нет напряжения.
Направление поворота вала зависит от того, на какой вход поступают импульсы. - Вал двигателя удерживается в неподвижном состоянии если на входе «ENABLE» нет напряжения и на входы «CW» и «CCW» не подаются импульсы.
- t1: После снятия напряжения со входа «ENABLE» должно пройти не менее 5мкс до подачи импульса на вход «CW» или «CCW».
- t2: После последнего импульса на одном входе должно пройти не менее 5мкс до подачи импульса на дрогой вход.
- t3, t4: Длительность импульса или паузы не должна быть меньше 2,5мкс.
- t5: Автоматическое снижение тока удержания происходит через 1-2 сек после подачи последнего импульса. Время зависит от типа драйвера.
Подключение управляющих выводов драйвера:
Для подключения управляющих выводов можно использовать одну их следующих схем:
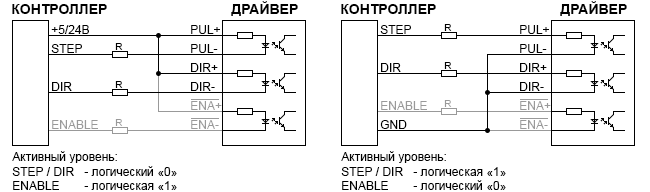
Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino:
Так как логические уровни Arduino UNO равны 5В, то при подключении управляющих выводов к драйверу, ограничивающие сопротивления R не нужны.
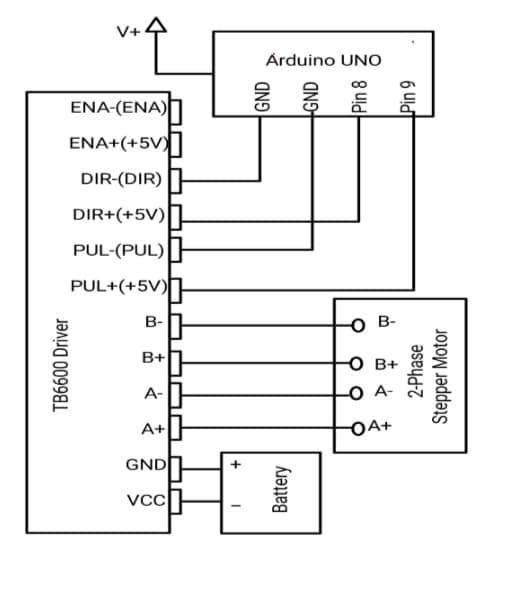
Для подключения драйвера к Arduino воспользуемся схемой где выводы PUL-, DIR-, ENA- подключены к GND контроллера (правая схема на картинке выше).
Если подключить драйвер к Arduino без использования сигнала ENABLE, оставив выводы ENA+ и ENA- не подключёнными, то приведённый ниже скетч не сможет освобождать вал. Вал двигателя будет удерживаться всё время, пока он не вращается.
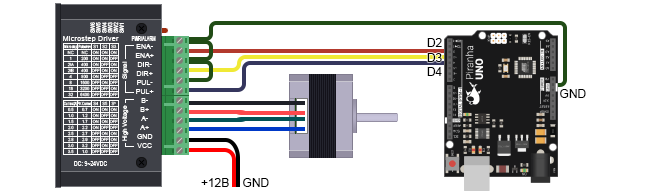
Выводы драйвера ENA+, DIR+ и PUL+ можно подключить к любым выводам Arduino, их номера указываются в начале скетча. В примере это выводы 2, 3 и 4 соответственно.
Если для подключения драйвера воспользоваться схемой где выводы PUL+, DIR+, ENA+ подключены к 5V контроллера (левая схема на картинке выше), то в скетче нужно изменить логические уровни устанавливаемые функциями digitalWrite().
Управление двигателем при помощи Arduino:
Для работы скетча установите микрошаг 1/4, что соответствует 800 тактов на 1 оборот. Микрошаг устанавливается DIP-переключателями драйвера согласно таблице на его корпусе.
Скетч постоянно повторяет 4 действия:
- Поворот вала на 2 полных оборота в одну сторону.
- Остановка двигателя на 5 секунд с удержанием вала.
- Поворот вала на 2 полных оборота в другую сторону.
- Остановка двигателя на 5 секунд с освобождением вала.
const uint8_t pin_ENA = 2; // Вывод Arduino подключённый к входу драйвера ENA+.
const uint8_t pin_DIR = 3; // Вывод Arduino подключённый к входу драйвера DIR+.
const uint8_t pin_PUL = 4; // Вывод Arduino подключённый к входу драйвера PUL+.
// Вывод GND Arduino соединён с входами драйвера ENA-, DIR-, PUL-.
uint32_t f = 1000; // Определяем частоту следования микрошагов от 1 до 200'000 Гц.
// Чем выше частота, тем выше скорость вращения вала.
void setup(){ //
pinMode( pin_ENA, OUTPUT ); // Конфигурируем вывод Arduino как выход.
pinMode( pin_DIR, OUTPUT ); // Конфигурируем вывод Arduino как выход.
pinMode( pin_PUL, OUTPUT ); // Конфигурируем вывод Arduino как выход.
} //
//
uint32_t t = 1000000/f/2; // Определяем длительность импульсов t3 и пауз t4 в мкс.
//
void loop(){ //
// Готовимся к движению вала: //
digitalWrite( pin_ENA, 0 ); // Разрешаем работу двигателя.
delayMicroseconds(5); // Выполняем задержку t1 (см. график STEP/DIR).
digitalWrite( pin_DIR, 0 ); // Выбираем направление вращения.
delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR).
// Поворачиваем вал на 2 оборота: //
for(int i=0; i<1600; i++){ // Выполняем 1600 проходов цикла (1 оборот = 800 тактов, 2 оборота = 1600).
digitalWrite( pin_PUL, 1 ); // Устанавливаем на выводе PUL состояние логической «1».
delayMicroseconds(t); // Выполняем задержку t3 (см. график STEP/DIR).
digitalWrite( pin_PUL, 0 ); // Устанавливаем на выводе PUL состояние логического «0».
delayMicroseconds(t); // Выполняем задержку t4 (см. график STEP/DIR).
} //
// Останавливаем вал удерживая его: // Двигатель не вращается, если на вывод PUL не поступают импульсы.
delay(5000); // Ждём 5 секунд. В это время двигатель остановлен, его вал удерживается.
// Меняем направление движения вала: //
digitalWrite( pin_DIR, 1 ); // Меняем логический уровень вывода DIR с 0 на 1.
delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR).
// Поворачиваем вал на 2 оборота: //
for(int i=0; i<1600; i++){ // Выполняем 1600 проходов цикла (1 оборот = 800 тактов, 2 оборота = 1600).
digitalWrite( pin_PUL, 1 ); // Устанавливаем на выводе PUL состояние логической «1».
delayMicroseconds(t); // Выполняем задержку t3 (см. график STEP/DIR).
digitalWrite( pin_PUL, 0 ); // Устанавливаем на выводе PUL состояние логического «0».
delayMicroseconds(t); // Выполняем задержку t4 (см. график STEP/DIR).
} //
// Останавливаем вал без удержания: //
digitalWrite( pin_ENA, 1 ); // Запрещаем работу двигателя, отключаем токи в обмотках.
delay(5000); // Ждём 5 секунд. В это время двигатель отключен, его вал свободен.
} //
- Движение вала на 2 оборота в одну сторону:
Перед началом движения вала мы разрешаем работу двигателя (установив 0 на выводе ENA) и выбираем направление движения (установив 0 или 1 на вывод DIR), далее выполняем движение подачей импульсов на вывод PUL в теле цикла for. Каждый импульс поворачивает ротор на угол одного микрошага. Микрошаг установлен DIP-переключателями в положение 800 тактов на полный оборот. Код цикла выполняется 1600 раз, значит вал повернётся на 2 оборота. - Остановка вала с удержанием:
Двигатель не вращается, если на вывод PUL не поступают импульсы. Значит обычная задержка на 5000 мс приведёт к остановке двигателя на 5 секунд. Так как работа двигателя была разрешена (на выводе ENA ранее был установлен 0), то через обмотки двигателя будет протекать ток удержания вала. - Движение вала на 2 оборота в другую сторону:
Направление движения вала определяется логическим уровнем на выводе DIR. Ранее на нём был установлен 0, значит теперь нужно установить 1. Далее подачей импульсов на вывод PUL мы заставляем вращаться вал, но теперь в другую сторону. - Остановка вала без удержания:
В предыдущий раз мы останавливали двигатель прекращая подавать импульсы на вывод PUL, но не запрещали работу двигателя, в результате через его обмотки протекал ток удержания вала. Теперь мы запретим работу двигателя установив на выводе ENA уровень логической 1, что приведёт к исчезновению токов в обмотках двигателя. Теперь в течении 5 секунд, двигатель будет не только остановлен, но и его вал можно свободно вращать руками.
Управление шаговым двигателем по прерываниям от 2 таймера Arduino:
const uint8_t pin_ENA = 2; // Вывод Arduino подключённый к входу драйвера ENA+.
const uint8_t pin_DIR = 3; // Вывод Arduino подключённый к входу драйвера DIR+.
const uint8_t pin_PUL = 4; // Вывод Arduino подключённый к входу драйвера PUL+.
// Вывод GND Arduino соединён с входами драйвера ENA-, DIR-, PUL-.
volatile uint32_t step=0; // Переменная хранит количество микрошагов, которые требуется совершить.
//
void setup(){ //
pinMode( pin_ENA, OUTPUT ); // Конфигурируем вывод Arduino как выход.
pinMode( pin_DIR, OUTPUT ); // Конфигурируем вывод Arduino как выход.
pinMode( pin_PUL, OUTPUT ); // Конфигурируем вывод Arduino как выход.
funcSetTimer2( 1000 ); // Запускаем 2 таймер указав частоту следования микрошагов от 1 до 200'000 Гц.
} // Чем выше частота, тем выше скорость вращения вала.
//
void loop(){ //
// Готовимся к движению вала: //
digitalWrite( pin_ENA, 0 ); // Разрешаем работу двигателя.
delayMicroseconds(5); // Выполняем задержку t1 (см. график STEP/DIR).
digitalWrite( pin_DIR, 0 ); // Выбираем направление вращения.
delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR).
// Поворачиваем вал на 2 оборота: //
step=1600; // Указываем количество микрошагов, которые требуется совершить.
while(step){;} // Ждём обнуления переменной.
// Останавливаем вал удерживая его: // Двигатель не вращается, если на вывод PUL не поступают импульсы.
delay(5000); // Ждём 5 секунд. В это время двигатель остановлен, его вал удерживается.
// Меняем направление движения вала: //
digitalWrite( pin_DIR, 1 ); // Меняем логический уровень вывода DIR с 0 на 1.
delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR).
// Поворачиваем вал на 2 оборота: //
step=1600; // Указываем количество микрошагов, которые требуется совершить.
while(step){;} // Ждём обнуления переменной.
// Останавливаем вал без удержания: //
digitalWrite( pin_ENA, 1 ); // Запрещаем работу двигателя, отключаем токи в обмотках.
delay(5000); // Ждём 5 секунд. В это время двигатель отключен, его вал свободен.
} //
//
// ОБРАБОТКА ПРЕРЫВАНИЙ 2 ТАЙМЕРА: //
ISR(TIMER2_COMPA_vect){ // Функция вызывается по совпадению регистров TCNT2 и OCR2A.
if( step ){ // Если требуется выполнять микрошаги, то ...
bool p = digitalRead(pin_PUL); // Определяем текущее состояние на выводе PUL.
digitalWrite(pin_PUL, !p); // Меняем состояние на выводе PUL.
if( p ){ step--; } // Уменьшаем количество требуемых микрошагов.
} //
} //
//
// ФУНКЦИЯ НАСТРОЙКИ 2 ТАЙМЕРА: //
void funcSetTimer2(uint32_t f){ // Параметр: «f» - частота тактирования ШД от 1 до 200'000 Гц.
if(f>200000){f=200000;}
// Определяем значение предделителя:
uint16_t i; uint8_t j; f*=2;
if(f>(F_CPU/255/ 1)){i= 1; j=1;}else
if(f>(F_CPU/255/ 8)){i= 8; j=2;}else
if(f>(F_CPU/255/ 32)){i= 32; j=3;}else
if(f>(F_CPU/255/ 64)){i= 64; j=4;}else
if(f>(F_CPU/255/128)){i= 128; j=5;}else
if(f>(F_CPU/255/256)){i= 256; j=6;}else
{i=1024; j=7;}
// Устанавливаем регистры 2 таймера:
TCCR2A = 0<<COM2A1 | 0<<COM2A0 | 0<<COM2B1 | 0<<COM2B0 | 1<<WGM21 | 0<<WGM20;
TCCR2B = 0<<FOC2A | 0<<FOC2B | 0<<WGM22 | j;
OCR2A = (uint8_t)(F_CPU/(i*f))-1;
TIMSK2 = 0<<OCIE2B | 1<<OCIE2A | 0<<TOIE2;
SREG = 1<<7;
}
Данный скетч выполняет те же действия что и предыдущий. Но подача импульсов на вывод PUL осуществляется не в цикле основного кода, а по прерываниям от таймера.
Как только переменной step присваивается число отличное от 0, то на драйвер начинают поступать импульсы. Значение step убывает с каждым поданным импульсом, пока не достигнет 0, что приведёт к остановке вала двигателя. Частота подачи импульсов в Гц указывается функцией funcSetTimer2().
В данном скетче мы ждём завершение вращения вала проверяя значение step в цикле while, вместо этого можно выполнять другие действия, например, опрашивать концевики, датчики, измерять пройденное расстояние и т.д.
Код работает на Arduino UNO, Pro Mini, Nano, Mega.
Ссылки
- Шаговые двигатели.
- Драйвер шагового двигателя, TB6600 (4.0А).
- Драйвер шагового двигателя DM556 (5.6A).
- Драйвер шагового двигателя DM860H (7.2A).
- Wiki — Шаговые двигатели.
Драйвер двигателя TB6600 улучшает работу таких устройств, как машины с ЧПУ и 3D-принтеры, используя расширенную обработку сигналов ШИМ и способности к микроплейке.TB6600, отличный от любителей и небольших проектов, легко соединяется с популярными микроконтроллерами, удовлетворяя различные потребности в проекте с эффективными низкопроизводительными характеристиками.Несмотря на свои сильные стороны, он имеет некоторые ограничения в профессиональных условиях, поэтому лучше выбрать правильное приложение, чтобы обеспечить надежные, длительные результаты.
Каталог
Обзор TB6600
А TB6600 Моторный драйвер предназначен для контроля биполярных шаговых двигателей с сигналами ШИМ, управляя движениями двигателя с напряжением до 50 В и токами до 5А.Он поддерживает вперед и обратное движение, работая по тактовому сигналу для асинхронной работы и позволяя до 1/16 микроэпппинга, что делает его достаточно точным для задач, требующих подробных технических контролей с 2-фазными и 4-фазными гибридными двигателями.Эти способности дают двигателю быстрые ответы и большую функциональность, обращаясь к тем, кто ищет контроль и точность.
Соединения штифтов

| Штифт № | Ввод | Символ | Функциональное описание | Примечание |
| 1 | Выход | ТРЕВОГА | TSD/ISD монитор PIN | Подтягивание от внешнего сопротивления |
| 2 | Вход | Sgnd | Сигнал земля | |
| 3 | Вход | T/Auto | Крутящий момент (выходной ток) Настройка входного штифта | L: защелка, ч: автоматический возврат |
| 4 | Вход | Защелка/val | Выберите тип возврата для TSD. | L: защелка, ч: автоматический возврат |
| 5 | Вход | Вреф | Вход напряжения для уровня тока 100% | — |
| 6 | Вход | Венчурной | Источник питания | — |
| 7 | Вход | М1 | Настройка режима возбуждения вход | — |
| 8 | Вход | М2 | Настройка режима возбуждения вход | — |
| 9 | Вход | M3 | Настройка режима возбуждения вход | — |
| 10 | Выход | Out2b | B Выход канала 2 | — |
| 11 | Выход | Out1b | B Выход канала 1 | — |
| 12 | Вход | N/б | B канал вывода вывода канала | — |
| 13 | Выход | Out2a | Вывод канала 2 | — |
| 14 | Выход | Out1a | Выход канала 1 | — |
| 15 | Вход | N/a | Штифт обнаружения вывода канала | — |
| 16 | Выход | PGND2A | Силовая земля | — |
| 17 | Выход | PGND1A | Силовая земля | — |
| 18 | Выход | PGND1B | Силовая земля | — |
| 19 | Выход | PGND2B | Силовая земля | — |
| 20 | Вход | ДАВАТЬ ВОЗМОЖНОСТЬ | Включить входной штифт сигнала | H: Enable, L: все выходы |
| 21 | Вход | ПЕРЕЗАГРУЗИТЬ | Сбросить входной штифт сигнала | L: начальный режим |
| 22 | Вход | CLK | CLK Pulse Pint входной штифт | |
| 23 | Вход | CCW/CW | Прямое/обратное управление в штифте | L: CW, H. |
| 24 | Выход | Вирт | PIN -штифт подключения резистора для настройки внутренних колебаний | Соединение конденсатора с SGND |
| 25 | Выход | МО | Контактный штифт бокового соединения для конденсатора питания | Подтягивание от внешнего сопротивления |
Модели CAD TB6600

Уникальные особенности TB6600
| Особенность | Описание |
| Тип драйвера | Биполярный шаговый двигатель |
| Напряжение снабжения | До 50 В. |
| Рейтинг тока | 4,5А за фазу |
| Пиковой ток | 5A |
| Микро -ступенчатые варианты | 1/1, 1/2, 1/4, 1/8 и 1/16 |
| Управление вращением | Вперед и обратное вращение |
| Тепловое отключение | Схема встроенной тепловой отключения (TSD) |
| Обнаружение чрезмерного тока | Встроенная схема обнаружения чрезмерного тока (ISD) |
TB6600 Технические характеристики
| Тип | Параметр | Тип | Параметр |
| Время выполнения завода | 14 недель | Монтажный тип |
Через дыру |
| Пакет / корпус | 25-SIP сформировали лиды | Поверхностное крепление |
НЕТ |
| Количество булавок | 25 | Рабочая температура |
-30 ° C до +85 ° C TA |
| Упаковка | Поднос | Опубликовано |
2011 год |
| Статус частично | Активный | Уровень чувствительности влаги (MSL) |
1 (неограниченный) |
| Количество терминаций | 25 | Код ECCN |
Ear99 |
| Приложения | Общее назначение | Напряжение — поставка |
8V-42V |
| Терминальная позиция | Зигзаг | Пиковая температура отвоз (CEL) |
НЕ УКАЗАН |
| Напряжение снабжения | 24 В | Терминал |
1 мм |
| Время @ | НЕ УКАЗАН | Функция |
Драйвер — Полностью интегрированный, управление и этап питания |
| Выходное напряжение | 15 В | Напряжение питания — мин (vsup) |
8 В |
| Количество каналов | 2 | Интерфейс |
Параллель |
| Аналоговый IC — другой тип | Шаговый контроллер двигателя | Выходная конфигурация |
Половина моста (4) |
| Номинальное входное напряжение | 5,5 В. | Напряжение — нагрузка |
8V-42V |
| Максимальная частота | 200 кГц | Мотор тип |
Шата — биполярный |
| Шаг разрешение | 1, 1/2, 1/4, 1/8, 1/16 | Высота сидя (максимум) |
19,37 мм |
| Ширина | 4,5 мм | Статус ROHS |
ROHS COMPARINT |
Функциональная диаграмма TB6600

Блок -схема TB6600 представляет внутреннюю архитектуру IC TB6600 Stepper Motor Driver IC.Вот краткое описание:
Входная цепь — Выбор режима обрабатывает (M1, M2, M3), направление шага (CW/CCW), такточный сигнал (CLK), сброс и включает входы.
Регулятор (Reg) — Генерирует подачу 5 В для внутренней схемы.
Защитные цепи — Включает в себя тепловое отключение (TSD), перегрузку (ISD) и заблокированное заблокирование (UVLO).
Генератор (OSC) — Генерирует внутренние сигналы часов.
Текущие селекторные схемы — Регулируйте уровни тока двигателя для эффективной работы.
Схемы драйвера до привода и H — Управляйте моторными фазами (Out1a/b, Out2a/b) для управления шагами -двигателями.
Выводы обратной связи (NFA, NFB) — Следите за током двигателя для каждой фазы.
Наземные и мощные булавки — Обеспечить электрическое заземление (SGND, PGND) и напряжение питания (VCC).
Разное выходы — Включите оповещение о передаче сигналов неисправности и MO для состояния работы двигателя.
TB6600 схема схемы
Приложения TB6600
Драйвер двигателя TB6600 является ценным выбором для управления мощными шаговыми двигателями NEMA, особенно от 42х42 мм до 60×60 мм.
Этот драйвер легко вписывается в различные механические и автоматизированные системы, поиск использования в X-y таблицы, гравирующие машины и оборудование для маркировки. В этих случаях это обеспечивает плавные, точные движения, необходимые для точных задач. Лазерные резаки и роботизированные сборочные линии пользоваться его устойчивой, долгосрочной производительности.
Подчеркнутые особенности включают низкий шум и уменьшенное тепло, которые особенно полезны в тихих условиях, таких как Небольшие мастерские и классные комнаты. С практическим опытом, он оказывается надежным в быстрых операциях и точных движениях, показывая свои возможности.
Вы можете использовать TB6600 во многих DIY и мелкие промышленные проекты. Его твердая сборка хорошо подходит для проектов, нуждающихся в как быстрое, так и точное управление движением, так и надежную работу.Для тех, кто знает, как настраивать его, точная настройка может значительно улучшить результаты, показав роль TB6600 в поддержке творческих проектов.
TB6600 Компонентная упаковка

Обзор производителя
Расположенный в оживленном городе Токио, Япония, Toshiba Corporation создала сильное название на мировой арене.Предлагая широкий спектр продуктов и услуг, Toshiba работает в промышленных системах, электронных компонентах, полупроводниках и ИТ -решениях.Его наиболее известная работа-в полупроводниках, особенно благодаря разработке технологии флэш-памяти.Изобретение Toshiba в флэш-памяти отражает его инновационный ведущий и дальностный подход, оставляя длительное влияние на отрасль.
Часто задаваемые вопросы [FAQ]
1. Что показывает индикатор на драйвере TB6600 Stepper Motor Driver?
Свет указывает на мощность и рабочее состояние устройства.Когда свет включен, он показывает, что устройство получает питание и активно.
2. Какой водитель подходит, если я строю роботизированную руку с шаговыми двигателями?
Подумайте об использовании TB6600 для роботизированной руки.Он обеспечивает высокую точность, достигая около 97% точности и тихо работает для снижения шума.По цене около 800 долларов, его производительность стоит инвестиций.
3. Как я могу контролировать два шаговых двигателя с помощью Arduino Uno или Raspberry Pi?
Arduino Uno и Raspberry Pi не могут напрямую питание шаговых двигателей, потому что они не обеспечивают достаточно тока, но они могут контролировать их с помощью модулей драйверов.Такие водители, как DRV8825, A4988 и TB6600, популярны для NEMA 17 Stepper Motors.Эти модули позволяют точно управлять движениями и удовлетворить потребности в силе, которые Arduino Uno или Raspberry Pi не могут поддержать.
Доброго времени суток, уважаемые коллеги! Сегодня сделаем правильное подключение БОЛЬШИХ (или не очень :))) ) внешних драйверов для 3D принтера, чтобы все РАБОТАЛО и работало как надо: без смещений и прочей чепухи, которую даже опытный боец может принять за износ механики!
-На что обратить внимание в первую очереди?
-Напряжение не только ПИТАНИЯ, но и ЛОГИКИ! Далее капсом не пользуюсь;))
Дело в том, что наши платы выдают до 3,3 вольта на логический сигнал (не нужно сейчас лезть с мультиметром, это на десерт!!!!), для драйвера по типу А4988 вполне, а вот что побольше и подальше от управляющей платы часто требует 4,5-5 вольт или даже 12/24 вольта но в паре с резисторами (чтобы не спалить мозги). Сегодняшние претенденты на звание идеально совместимой пары управляющей платы и внешнего драйвера для точного перемещения…..
Плата SKR V2.0 и драйвера DM556. У кого что-то другое (хоть пара рампс и tb6600) не переживайте, инструкция универсальна!!!
Собственно драйвер:
)")
И плата:
)")
От платы на драйвера у нас всегда идут только два управляющих сигнала: STEP (его ещё называют PULSE) — сигнал шага и DIR — в какую сторону «шагать». Можно посмотреть их на обороте платы или на маленьком драйвере (в какую ячейку втыкивается ножка когда вставляете драйвер), у маленьких драйверов это соседние ножки, также найдем GND напротив DIR:
)")
Мои STEP (левая ячейка для одной ножки) и DIR (правая ячейка для одной ножки), GND напротив DIR
)")
Проверим же наверняка сколько вольт выдают пины нашей логики! В 99,9% случаев у плат для 3D принтеров это будет до 3,3 вольт. Замеряем напряжение мультиметром в режиме постоянного тока на каком-нибудь из рабочих концевиков (тот что щелкает при парковке), для этого отключаем его и тыкаем щупами в логический пин (тот что не +5V) и GND, у меня получилось +3,25 V (если перепутали плюс и GND,то покажет -3,25 V)
-Почему не измерил пины STEP и DIR?
-Для этого пришлось бы использовать не мультиметр за 450 рублей, а осциллограф, который бы улавливал импульсный ток во время движения по осям. STEP и DIR импульсные сигналы, имеющие частоту (до 200 000 раз в секунду ) и ширину (грубо говоря это длительность импульса), в отличии от вкл/выкл режима концевичков. Однако и то и то идет по пути логического сигнала от управляющего чипа, вряд ли будет иное напряжение на STEP и DIR. Если нет осциллографа, но очень хочется проверить что выдает именно STEP и DIR , то придется поменять одного из них местами с логическим пином концевика, по этому поводу я снял небольшое видео где меняю пины термисторов https://www.youtube.com/watch?v=oS29VAp2JGo , главное не забудьте потом вернуть все на место!
Переходим к драйверу!!! Гуглим DM556 pdf, нам выдается инструкция то ли даташит (уж как не называй) на наш драйвер. Иногда есть несколько инструкций, смело выбирайте наиболее удобную (с красивыми табличками и рисунками)). Листаем до табличек с описанием токов нашим драйверам:
)")
Тут нас интересуют:
1) Output current — максимальный ток на двигателе, который указывается в PDF двигателя и выставляется маленькими переключателями на драйвере
2) Supply voltage — напряжение блока питания драйвера , 36 ок, но пальцы лучше не сувать
Если набрать название нашего мотора и слово PDF, то там помимо ампер будет указание VDC и значение порядка 1-5 вольт, однако драйвера управляют моторами не постоянным током, а по принципу шим (кто слышит писк мотора — это работа шим), что это читайте отдельно, но если коротко 36 вольт подаются не постоянно, а вкл/выкл много много раз в секунду
3) Logic signal current — ток для логического сигнала , до 16 мА, то есть до 0,016 А
4) Pulse input frequency — частота логики в кГЦ, до 200 кГЦ (Понадобится при прошивке )
5) Что-то там про сопротивление изоляции, не важно))
Проматываем до таблички управляющих сигналов и тут… 4-5 V для верхнего сигнала PUL (STEP) и DIR!!! А при наличии резисторов можно и 12 вольт и 24, но у нас только 3,25 V.
)")
Что касается сигнала ENA (Enable) его обычно не подключают т.к. из-за него драйвер будет игнорировать сигналы STEP и DIR , зачем оно нам?)) Но кому надо тому надо!)) Перед тем как начнем паять (или кому удобнее собирать брэдборд) листаем наш pdf и находим схемку с сопротивлением пинов драйвера:
)")
Сопротивление 270 Ом, при напряжении 4-5 вольт ток по закону Ома как раз около 16 мА, при 12 и резисторе на 1 кОМ +270 Ом уже 9,5 мА, при 24 и 2кОМ + 270 Ом тоже в районе 10 мА, как того и требует инструкция. На наших платах достаточно 5-ти вольтовых источников питания для концевиков, используем их. Тут нужно загуглить ближайший «Магазин радиотехники» и набрать npn транзисторов и к ним резисторов (dc-dc повышающие преобразователи не прокатят). Стоят они по несколько рублей (а иногда и по рублю), какие именно нужно можно легко подсчитать:
Сопротивление как DIR так и STEP у драйвера 270 Ом, напряжение хотим 4-5V (это напряжение коллектор-эмиттер), а управляющий сигнал порядка 3,25 вольт (это напряжение база-эмиттер) . Под такие цели можно найти много транзисторов, я выберу 2N3904, у которого напряжение база-эмиттер до 6 вольт, а коллектор-эмиттер аж до 40.
)")
На один драйвер понадобится 2 транзистора. Резисторов же нужно аж 2 штуки. Рассчитаем какие нужны:
Т.к. у нас напряжение +5 вольт с платы, а транзисторы снижают напряжение где-то на 0,6 вольт, то при 4,4 вольтах и 270 Ом ток коллектор-эмиттер будет около 16 мА, что хорошо. Смотрим на картинку — база это лапка посередине, к ней подключаем наши 3,25 вольт через резистор номиналом (3,25-0,6)/(0,016/200)=33000 Ом или 33 кОМ, где 3,25 V это напряжение логики, 0,6 V падение напряжение, 0,016 A подсчитанный выше ток, 200 это средний коэффициент усиления (hfe) транзистора с картинки выше. Таким образом нам нужен резистор 33-35 кОМ. Также необходим более мощный резистор на 500-1000 кОМ (1 мегаом), который будет служить стягивающим резистором, получится так:
)")
Осталось совсем немного!! Надо подправить прошивку под наш внешний драйвер: задать частоту, длительность импульса и задержки)) Кто перепиновывал пин — вернуть все обратно. Заходим в Configuration_adv.h, изменяем количество сегментов (у нас ведь теперь хорошие большие драйвера:))
/ Moves (or segments) with fewer steps than this will be joined with the next move
#define MIN_STEPS_PER_SEGMENT 1
Далее устанавливаем задержки для сигнала DIR по PDF файлу драйвера (таблички в начале), у меня это минимум 5 микросекунд, тут её указывают в наносекундах, значит 5000 ns, я поставлю 6000
/**
* Minimum delay before and after setting the stepper DIR (in ns)
* 0 : No delay (Expect at least 10µS since one Stepper ISR must transpire)
* 20 : Minimum for TMC2xxx drivers
* 200 : Minimum for A4988 drivers
* 400 : Minimum for A5984 drivers
* 500 : Minimum for LV8729 drivers (guess, no info in datasheet)
* 650 : Minimum for DRV8825 drivers
* 1500 : Minimum for TB6600 drivers (guess, no info in datasheet)
* 15000 : Minimum for TB6560 drivers (guess, no info in datasheet)
*
* Override the default value based on the driver type set in Configuration.h.
*/
#define MINIMUM_STEPPER_POST_DIR_DELAY 6000
#define MINIMUM_STEPPER_PRE_DIR_DELAY 6000
Очень важная штука — ширина импульса, в табличке пишут что pul не менее 2,5 микросекунд, но лучше я поставлю 5 микросекунд.
/**
* Minimum stepper driver pulse width (in µs)
* 0 : Smallest possible width the MCU can produce, compatible with TMC2xxx drivers
* 0 : Minimum 500ns for LV8729, adjusted in stepper.h
* 1 : Minimum for A4988 and A5984 stepper drivers
* 2 : Minimum for DRV8825 stepper drivers
* 3 : Minimum for TB6600 stepper drivers
* 30 : Minimum for TB6560 stepper drivers
*
* Override the default value based on the driver type set in Configuration.h.
*/
#define MINIMUM_STEPPER_PULSE 5
И конечно же частота импульса. Драйвера способны выдавать до 200 кГц, но мы увеличили длительность импульса в 2 раза, поэтому уменьшаем частоту в 2 раза и оставляем 100 кГц
* Maximum stepping rate (in Hz) the stepper driver allows
* If undefined, defaults to 1MHz / (2 * MINIMUM_STEPPER_PULSE)
* 5000000 : Maximum for TMC2xxx stepper drivers
* 1000000 : Maximum for LV8729 stepper driver
* 500000 : Maximum for A4988 stepper driver
* 250000 : Maximum for DRV8825 stepper driver
* 150000 : Maximum for TB6600 stepper driver
* 15000 : Maximum for TB6560 stepper driver
*
* Override the default value based on the driver type set in Configuration.h.
*/
#define MAXIMUM_STEPPER_RATE 100000
!!!!И ТЕПЕРЬ САМОЕ ВАЖНОЕ!!!
Без чего драйвера не будут работать (а так могут неплохо «шевелиться» и на 3,25 вольт):
Практически для всех больших драйверов тут нужно поменять false на true
// By default pololu step drivers require an active high signal. However, some high power drivers require an active low signal as step.
define INVERT_X_STEP_PIN true
#define INVERT_Y_STEP_PIN false
#define INVERT_Z_STEP_PIN false
#define INVERT_I_STEP_PIN false
#define INVERT_J_STEP_PIN false
#define INVERT_K_STEP_PIN false
#define INVERT_U_STEP_PIN false
#define INVERT_V_STEP_PIN false
#define INVERT_W_STEP_PIN false
#define INVERT_E_STEP_PIN false
В современной автоматизации и робототехнике точность и надежность являются ключевыми.Драйвер шагового двигателя TB6600 упрощает управление двигателем с исключительной точностью, смешивая расширенные функции и доступную интеграцию для вас.Эта статья входит в технические возможности TB6600, практические приложения и методы интеграции.Благодаря надежному дизайну H-Bridge и совместимости с такими платформами, как Arduino, TB6600 идеально подходит для машин с ЧПУ, 3D-печати и систем автоматизации.Изучите, как этот универсальный драйвер может поднять ваши проекты.
Каталог
Обзор модуля драйвера двигателя TB6600
А TB6600 Модуль драйвера шагового двигателя-это устройство, отличающееся его устойчивостью и адаптивностью для управления 2-фазными шаговыми двигателями.Он легко подключается к широкому массиву микроконтроллеров, в основном Arduino, способствуя созданию точных цифровых импульсных выходов 5 В.Эти выходы динамичны для поддержания тонкого баланса управления двигателем.Работая в диапазоне напряжений 9-42 В постоянного тока и поддерживая пиковой ток 4 ампер, это универсальный выбор для различных моторных проектов.Эта адаптивность позволяет эффективно управлять моторным позиционированием и скоростью, что очень полезно в приложениях, которые направлены на минимизацию сложности кодирования.Высокочастотная изоляция модуля оптокуплера значительно повышает его надежность за счет снижения рисков интерференции и обеспечения стабильной работы.
Гармония с многочисленными микроконтроллерами делает драйвер TB6600 подходящим выбором для проектов, требующих сложного управления двигателем.Он плавно интегрируется с такими платформами, как Arduino, отражая его способность соответствовать разнообразным ожиданиям.Например, использование этого драйвера в машинах ЧПУ или 3D -принтеров позволяет точно и контролируемому движению, что иллюстрирует его полезность в различных областях.
Этот модуль выделяется благодаря поддержке 2-фазных и 4-фазных шаговых двигателей, так и гибридных конфигураций.Биполярная конструкция H-мостового моста является неотъемлемой частью эффективного управления напряжением и током, что обеспечивает пиковую производительность в своих приложениях.В средах, где точность и надежность приоритеты, такие как автоматизированные производственные линии и робототехника, эти функции высоко ценятся.
Функции
| Особенность | Описание |
| Тип драйвера | Биполярный драйвер DC Bipolar H-Bridge |
| Вывод параметры тока | 8 типов (от 0,5 до 3,5А), выбираемые до 4 ампер |
| Режимы подразделения | Разделяется до 32, выбираемых на 6 режимов |
| Параметры микроэлектрических шагов | 8 видов (1, 2/а, 2/b, 4, 8, 16, 32) |
| Изоляция входного сигнала | Высокоскоростное фотоэлектрическое разделение |
| Интерфейс | Полный стандартный интерфейс единого импульса |
| Функция удержания в автономном режиме | Да |
| Экологическая пригодность | Полузащиленное тело для суровых средств |
| Функция блокировки мощности | Полуавтоматический, энергосберегающий |
Конфигурация PIN
Технические характеристики
| Спецификация | Подробности |
| Рабочее напряжение | 9-40V DC |
| Выходной ток | 0,7A-4,0A (выбирается в 8 шагах через DIP-переключатели) |
| Входная частота импульса | До 20 кГц |
| Входные уровни сигнала | 5 В уровни сигнала |
| Пульс за революцию | 200-6400 |
| Ток логического сигнала | 8A-15A |
| Совместимость с двигателем | Подходит для 2-фазных и 4-фазных шаговых двигателей |
| Особенности защиты | Перегрузка, перегрев защиты |
| Входная изоляция | Оптически изолирован |
| Устойчивость к изоляции | 500 мегхм |
| Поддерживаемый режим | Режим PUL/FIR |
| Расходы | Бюджетный |
Конфигурация схемы H-мостового для TB6600
Модуль драйвера шагового двигателя TB6600 представляет собой серьезный компонент, предназначенный для управления как двухфазными, так и 4-фазными шаговыми двигателями, используя биполярную конфигурацию H-Bridge для эффективной работы.В этой конфигурации используются транзисторы MOSFET для обеспечения высокой производительности с точки зрения обработки тока и тепловой стабильности.Модуль работает путем взаимодействия с двумя первичными контрольными штифтами: шагом, который запускает двигатель, шагающий с каждым импульсом, и штифтом направления, который определяет направление вращения двигателя на основе приложенного напряжения.Вместе эти входы обеспечивают точный контроль над шагом двигателя и направлением вращения.
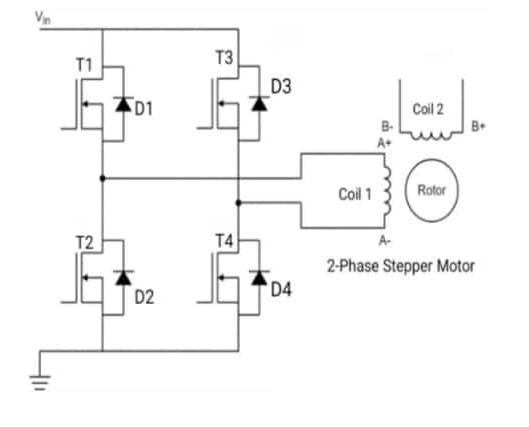
Схема схемы выделяет четыре ключевых транзистора, T1, T2, T3 и T4, расположенные в структуре H-мостика.Эти МОСФЕТЫ являются основой работы модуля, что позволяет иметь двунаправленный поток тока, необходимый для управления шаговым двигателем.Кроме того, диаграмма включает в себя диоды обработки (D1, D2, D3 и D4), которые являются ключом для защиты цепи от пиков напряжения, вызванных индуктивной нагрузкой двигателя.Эти диоды предотвращают перегрузку и повреждение чувствительных компонентов во время работы.A+, A-, B+и B-клеммы используются для подключения двигателя, обеспечивая точное и контролируемое движение моторного вала.
Как H-мост обеспечивает вращение двигателя?
Драйвер TB6600 работает через скоординированное действие транзисторов MOSFET в H-мостике.Например:
• Вращение по часовой стрелке происходит, когда транзисторы T1 и T4 активируются, направляя поток тока от A+ до A-.
• Вращение против часовой стрелки происходит, когда T2 и T3 задействованы, обращая вспять текущий поток от A- до A+.
Эта чередующаяся активация транзисторов обеспечивает плавное двунаправленное движение.Для достижения оптимального крутящего момента и эффективной работы необходимы точное время и регулирование напряжения.
Режимы работы для универсального управления
TB6600 поддерживает четыре различных режима эксплуатации, каждый из которых предназначен для баланса крутящего момента, точности и размера шага, в зависимости от требований применения:
• Волновой режим: В этом режиме только одна катушка энергична за раз.Активация одной катушки вращает двигатель на 90 градусов в одном направлении, в то время как обращение тока вращает его в противоположном направлении.Чередуя катушки, двигатель достигает непрерывной работы.Этот режим прост, но обеспечивает меньше крутящего момента по сравнению с другими режимами.
• Полный шаг режим: Обе катушки включены одновременно в этом режиме, генерируя более сильное магнитное поле.Это приводит к увеличению крутящего момента, что делает его идеальным для приложений, требующих большей мощности и стабильности.
• Полушаговый режим: Комбинация режима волны и полного шага, этот режим чередуется между энергией одной катушки и обеих катушек.Это эффективно уменьшает размер шага до 45 градусов, обеспечивая баланс между точностью и крутящим моментом.Тем не менее, крутящий момент может варьироваться в зависимости от того, являются ли одна или обе катушки под напряжением на определенном шаге.
• Режим микростепа
: Наиболее точный из всех режимов, режим микростепа еще больше уменьшает размер шага, тщательно модулируя ток через фазы двигателя.Это достигается с использованием расширенных схем для создания гладких и постепенных переходов между шагами.Этот режим идеально подходит для приложений, требующих высокой точности и последовательного крутящего момента, таких как машины ЧПУ или робототехника.
Интеграция TB6600 с Arduino Uno
Эффективное управление шаговыми двигателями требует комбинации надежного аппаратного и тщательно запрограммированного программного обеспечения.TB6600 Stepper Motor Driver выделяется как отличный инструмент для работы 2-фазных шаговых двигателей.Он поддерживает несколько режимов эксплуатации, таких как волна, полная шага, полушаговая и микроэпптинг.Его встроенные функции защиты, в том числе гарантия от низкого напряжения, перегрузки и перегрева, сделают его солидным выбором для проектов, требующих точности и долговечности.
Чтобы настроить TB6600 с помощью Arduino Uno, собрайте следующие компоненты:
• arduino uno r3
• TB6600 Stepper Motor Driver (4A версия)
• Шаповый двигатель (с рекомендованным рейтингом 1,65А)
• Надежный источник питания (например, аккумулятор или регулируемый источник питания постоянного тока)
• перемычки
• Arduino IDE установлен на вашем компьютере
Чтобы интегрировать TB6600 с Arduino, следуйте этим подробным инструкциям
Подключить направление и импульсные сигналы
• Свяжите терминалы DIR+ и PUL+ на TB6600 с Arduino Pins 8 и 9 соответственно.Эти булавки посылают направление и импульсные сигналы.
• Прикрепите направление и пульсные клеммы к выводу земли (GND) Arduino.
• Подключите двигатель к TB6600: прикрепите провода шагового двигателя к терминалам TB6600.
• A+ и A- для одной катушки двигателя.
• B+ и B- для другой катушки.
• Включите драйвер TB6600: подключите контакты VCC и GND на TB6600 к вашему источнику питания.Убедитесь, что напряжение соответствует требованиям вашего двигателя и водителя, чтобы избежать повреждений.
Регулирование разрешения микростепа
TB6600 позволяет точно настроить точность движения шагового двигателя, используя переключатели SW1 и SW2.Отрегулируйте эти переключатели следующим образом:
• ¼ Шаг разрешения: установите SW1 и SW2.
• ⅛ Разрешение шага: установите SW1 и SW2 на.
• 1/32 этап.
• Режим полного шага: установите как SW1, так и SW2.
Таблица истины
| SW2 | Разрешение микростепа |
| ВЫКЛЮЧЕННЫЙ | 1/32 шаг |
| НА | 1/8 шаг |
| ВЫКЛЮЧЕННЫЙ | 1/4 шага |
| НА | Полный шаг |
Корректировки переключателя позволяют оптимизировать баланс между точностью и скоростью в зависимости от потребностей вашего проекта.
Чтобы убедиться, что ваш двигатель работает в пределах безопасного тока, TB6600 имеет дополнительные переключатели (SW4 и SW6) для регулировки потока тока.Эти настройки полезны для:
• Предотвращение повреждения перегрузки.
• Поддержание постоянной моторной производительности.
• Всегда убедитесь, что ток двигателя остается ниже максимума водителя 4А для защиты обоих компонентов.
• Направление двигателя управления: если вы хотите, чтобы двигатель вращался против часовой стрелки, измените состояние PIN -кода DIR+ в вашем коде Arduino.
• Тестирование и устранение неполадок: после завершения настройки загрузите базовый эскиз управления двигателем Stepper, чтобы проверить функциональность проводки и драйвера.
• Избегайте перегрева: обеспечить правильную вентиляцию для драйвера TB6600, особенно в приложениях с высоким током.
Приложения
Модуль TB6600 играет активную роль в многочисленных секторах, где используется тщательное управление двигателем.Его адаптируемость сияет в различных реализациях, которые подчеркивают его уникальные возможности:
Позиционирование антенны
В области телекоммуникаций достижение оптимального выравнивания антенны является обязательным для приема и передачи качества.TB6600 облегчает точное движение, тем самым повышая эффективность систем связи.
Управление моторным управлением
В рамках автоматизации и робототехники точная обработка шаговых двигателей достигается с помощью TB6600, что позволяет уточнить точность движения и надежность системы обеспечения.
Операции с ЧПУ
Для компьютерных численных управления (CNC) TB6600 повышает сложные процессы резки и фрезерования, что позволяет вам поддерживать высокий уровень точности и повторяемой точности в своей работе.
3D -печать точности
В Additive Manufacturing, особенно 3D -печати, TB6600 предлагает подробное управление двигателем, поддерживая точное расположение головок печати, необходимых для создания комплексных форм и форм.
Сложный моторный контроль
Модуль полезен для замысловатых задач управления двигателем в комплексных системах автоматизации, повышения эффективности и обеспечения утонченного управления.
Управление скоростью, положением и вращением
TB6600 превосходит в сценариях, требующих точной скорости и контроля вращения, в основном используемых для оптимизации производительности в постоянно меняющихся средах.
Устройства визуализации и банковские системы
Модуль поддерживает надежную работу камер и банкоматов, обеспечивая плавные, точные двигательные движения, что протягивает эксплуатационную продолжительность жизни устройств.
Точность в гравировке
Для инструментов гравюры и оборудования TB6600 обеспечивает точный контроль, необходимый для выполнения мелко детализированных дизайнов, что является опасным фактором в отраслях, где доминируют точность и детали.