

Read me first
Online Wiki page: https://docs.keyestudio.com/projects/KS0470/en/latest/,
Download the APP, Code and library : https://fs.keyestudio.com/KS0470,
Official website: https://keyestudio.com/
Note: Experiments should be conducted in line with the wiring diagram, including the use of right components and the wiring methods. For example, the supply power applied in the hook-up diagram is external power , so you will have to use external power rather than USB cable .
1. Introduction
Modern society is being driven at an astonishing pace by technological advancements, and STEM education (integrated education in Science, Technology, Engineering, and Mathematics) is receiving increasing attention as a key way to cultivate the next generation of innovative talent.
Arduino, as a tool that bridges programming study, hardware operation, and creative realization, is undoubtedly an ideal platform for STEM education. It not only serves as a programming and hardware learning environment but also inspires student creativity and sparks enthusiasm for learning.
The keyestudio 4WD Car offers up to 15 learning projects, with difficulties progressing step by step. These range from simple sensor applications to building a complex four-wheel-drive smart robot, helping students systematically understand the principles and real-world applications of sensors and hardware modules.
2. Features
-
Multi-purpose function: Obstacle avoidance, following, IR remote control, Bluetooth control, ultrasonic following and facial emoticons display.
-
Easy to build: No soldering circuit required, complete assembly easily.
-
High Tenacity: Aluminum alloy bracket, metal motors, high quality wheels and tracks.
-
High extension: expand other sensors and modules through motor driver shield and sensor shield.
-
Multiple controls: IR remote control, App control(iOS and Android system)
-
Basic programming:C language code of Arduino IDE.
3. Specification
Working voltage: 5v
Input voltage: 7-12V
Maximum output current: 2A
Maximum power dissipation: 25W (T=75℃)
Motor speed: 5V 200 rpm/min
Motor drive mode: dual H bridge drive
Ultrasonic induction angle: < 15 degrees
Ultrasonic detection distance: 2cm-400cm
Infrared remote control distance: 10 meters (measured)
Bluetooth remote control distance: 50 meters (measured)
Bluetooth control: support both Android and iOS system
4. Product List
|
No |
Name |
QTY |
Picture |
|---|---|---|---|
|
1 |
Keyestudio V4.0 Board |
1 |

|
|
2 |
Keyestudio Motor Driver Shield |
1 |
|
|
3 |
Keyestudio HM-10 Bluetooth-4.0 |
1 |
|
|
4 |
Red LED Module |
1 |
|
|
5 |
HC-SR04 Ultrasonic Sensor |
1 |
|
|
6 |
Keyestudio Line Tracking Sensor |
1 |
|
|
7 |
Keyestudio IR Receiver Sensor |
1 |
|
|
8 |
Keyestudio 8*16 LED Dot Matrix, with 4pin Dupont Line |
1 |
|
|
9 |
Keyestudio 9G Servo |
1 |
|
|
10 |
Keyestudio Remote Control |
1 |
|
|
11 |
USB Cable |
1 |
|
|
12 |
18650 Battery Holder |
1 |
|
|
13 |
6 AA Battery Holder |
1 |
|
|
14 |
Servo Platform |
1 |
|
|
15 |
15CM F-F 5P 24AWG Dupont Wire |
1 |
|
|
16 |
8cm F-F 3P 24AWG Dupont Wire |
1 |
|
|
17 |
4P to 1P Female DuPont Wire |
1 |
|
|
18 |
Acrylic Board |
1 |
|
|
19 |
Keyestudio 4WD Smart Car V2.0 Top Board |
1 |

|
|
20 |
Keyestudio 4WD Smart Car V2.0 Bottom PCB |
1 |
|
|
21 |
Fixed Parts |
4 |
|
|
22 |
Wheel |
4 |
|
|
23 |
M3*10MM Dual-pass Copper Bush |
10 |
|
|
24 |
M3*40MM Dual-pass Copper Bush |
4 |
|
|
25 |
M3*30MM Round Head Screws |
8 |
|
|
26 |
M3*6MM Round Head Screws |
40 |
|
|
27 |
M3 Nickel Plated Nuts |
16 |
|
|
28 |
M2X8MM Round Head Screws |
6 |
|
|
29 |
M3*8MM Round Head Screws |
4 |
|
|
30 |
M2 Nickel Plated Nuts |
6 |
|
|
31 |
M3*10MM Flat Screws |
3 |
|
|
32 |
Motor (with welding wire) |
4 |
|
|
33 |
3*40MM Screwdriver |
1 |
|
|
34 |
Black Nylon Ties 3*100MM |
6 |

|
|
35 |
Winding Pipe |
1 |
|
|
36 |
3Pin F-F Dupont Wire (20CM) |
3 |

|
|
37 |
Decorative Board |

|
5. Install Arduino IDE and Driver
Installing Arduino IDE
When you get the keyestudio V4.0 development board,you need to download Arduino IDE and driver firstly.
You could download Arduino IDE from the official website:https://www.arduino.cc/, click the SOFTWARE on the browse bar to enter download page, as shown below:

There are various versions of IDE for Arduino. Just download a version compatible with your system. Here we will show you how to download and install the windows version of Arduino IDE.

You can choose between the Installer (.exe) and the Zip packages. We suggest you use the first one that installs directly everything you need to use the Arduino Software (IDE), including the drivers. With the Zip package you need to install the drivers manually. The Zip file is also useful if you want to create a portable installation.

You just need to click JUST DOWNLOAD.
Keyestudio V4.0 Development Board
You need to know that keyestudio V4.0 development board is the core of this smart car.

keyestudio V4.0 development board is an Arduino uno-compatible board, which is based on ATmega328P MCU, and with a cp2102 Chip as a UART-to-USB converter.

It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz quartz crystal, a USB connection, a power jack, 2 ICSP headers and a reset button.

It contains everything needed to support the microcontroller. Simply connect it to a computer with a USB cable or power it via an external DC power jack (DC 7-12V) or via female headers Vin/ GND(DC 7-12V) to get started.
|
Microcontroller |
ATmega328P-PU |
|---|---|
|
Operating Voltage |
5V |
|
Input Voltage (recommended) |
DC7-12V |
|
Digital I/O Pins |
14 (D0-D13) (of which 6 provide PWM output) |
|
PWM Digital I/O Pins |
6 (D3, D5, D6, D9, D10, D11) |
|
Analog Input Pins |
6 (A0-A5) |
|
DC Current per I/O Pin |
20 mA |
|
DC Current for 3.3V Pin |
50 mA |
|
Flash Memory |
32 KB (ATmega328P-PU) of which 0.5 KB used by bootloader |
|
SRAM |
2 KB (ATmega328P-PU) |
|
EEPROM |
1 KB (ATmega328P-PU) |
|
Clock Speed |
16 MHz |
|
LED_BUILTIN |
D13 |
Installing the driver for Windows system
Let’s install the driver of keyestudio V4.0 board. The USB-TTL chip on V4.0 board adopts CP2102 serial chip.
Windows system

You can download the driver of the CP2101 in the following link.
https://www.silabs.com/developers/usb-to-uart-bridge-vcp-drivers?tab=downloads
For Windows system, you can select the first driver to download and upzip it.

Then open the device manager of computer. Right click Computer—– Properties—– Device Manager

The yellow exclamation mark on the page implies that the driver of CP2101 isn’t installed. Next, you should double-click the hardware to update the driver.

Click“OK”to enter the following page, click“browse my computer for updated driver software”. As shown below:

Navigate to the CP210x_Universal_Windows_Driver unzip folder that you have downloaded and click Next.


Open device manager, you will find the yellow exclamation mark disappear. The driver of CP2102 is installed successfully.

Installing the driver for MAC system
MAC system

You can download the driver of the CP2101 in the following link.
https://www.silabs.com/developers/usb-to-uart-bridge-vcp-drivers?tab=downloads
For MacOS system, you can select the this driver to download and upzip it.

Open the driver folder and double-click SiLabsUSBDriverDisk.dmg file.

You will view following files as follows:

Double-click Install CP210x VCP Driver, tick Don’t warn me and click Open

Click Continue

Click Continue and Agree

Click Continue and enter your user password.


9.Select Open Security Preferences

Click the lock then enter your user’s password to authorize.


Then click Allow

12.Back to installation page, and wait to install.

Successfully installed

Arduino IDE Setting
Clickicon,open Arduino IDE.

To avoid the errors when uploading the program to the board, you need to select the correct Arduino board that matches the board connected to your computer.
Then come back to the Arduino software, you should click Tools→Board, select the board. (as shown below)

Then select the correct COM port (you can see the corresponding COM port after the driver is successfully installed)

Before uploading the program to the board, let’s demonstrate the function of each symbol in the Arduino IDE toolbar.

1- Used to verify whether there is any compiling mistakes or not.
2- Used to upload the sketch to your Arduino board.
3- Used to send the serial data received from board to the serial plottle.
4- Used to send the serial data received from board to the serial monitor.
Start Your First Program
Open the file to select Example, choose BLINK from BASIC, as shown below:


Set board and COM port, the corresponding board and COM port are shown on the lower right of IDE.

Clickto start compiling the program, check errors.

Clickto upload the program, upload successfully.

Upload the program successfully, the onboard LED lights on for 1s, lights off for 1s. Congratulation, you have finished the first program.
6. How to Add Libraries?
What are Libraries ?
Libraries are a collection of code that makes it easy for you to drive a sensor,display, module, etc.
For example, the built-in LiquidCrystal library helps talk to LCD displays. There are hundreds of additional libraries available on the Internet for download.
The built-in libraries and some of these additional libraries are listed in the reference.
https://www.arduino.cc/en/Reference/Libraries
Add ZIP Libraries
When you want to add a zip library, you need to download it as a ZIP file, put in the proper directory. The Libraries needed to run the mini tank can be found on:https://fs.keyestudio.com/KS0470

Click Sketch—->Include Library—>Add.ZIP Library,then Then navigate to the library file you downloaded and click “open.”



Import the library. You can find it in the include library list.

Then the libraries of 4wd robot car are installed successfully.
7. Assembly the 4WD Car
Note: Peel the plastic film off the board first when installing the smart car.
Step 1: Mount the Bottom PCB
Prepare the parts as follows:
-
Gear Motor x4
-
Fixed Part x4
-
M3 Nickel Plated Nut x10
-
3x6mm Round-head Screw x14
-
4WD Bottom PCB x1
-
Tracking Sensor x1
-
Wheel x4
-
5P Dupont Wire x1
-
M3x40mm Copper Pillarx6
-
M3x30m Round-head Screw x8
-
M3x8mm Round-head Screw x2






Step 2: Install Dot Matrix
-
Prepare the parts as follows:
-
8X16 LED Panel x1
-
4WD Baffle
-
4P Wire x1
-
M2x8mm Round-head Screw x4
-
M2 Nut x4


Step 3: Install the Plastic Platform of Servo
-
Prepare the parts as follows:
-
Servo x1
-
M2x4 Screw x1
-
Black Cable Tiex2
-
Ultrasonic Sensorx1
-
Black Plastic Platform x1
-
M1.2×4 Tapping Screw x4
-
M2x8 Tapping Screw x2

You can find M1.2×4 screws inside the bag of the servo platform


/*
Set the 90-degree code,Copy the code and upload it to the development board. The steering gear connected to port D9 will rotate to 90 °
*/
#define servoPin 9 //servo Pin
int pos; //the angle variable of servo
int pulsewidth; // pulse width variable of servo
void setup() {
pinMode(servoPin, OUTPUT); //set servo pin to OUTPUT
procedure(0); //set the angle of servo to 0°
}
void loop() {
procedure(90); // tell servo to go to position in variable 90°
}
// function to control servo
void procedure(int myangle) {
pulsewidth = myangle x 11 + 500; //calculate the value of pulse width
digitalWrite(servoPin,HIGH);
delayMicroseconds(pulsewidth); //The duration of high level is pulse width
digitalWrite(servoPin,LOW);
delay((20 - pulsewidth / 1000)); // the cycle is 20ms, the low level last for
the rest of time
}


Step 4: Assemble Battery Holder
Prepare the parts as follows:
-
Top PCB x1
-
M3 Nut x3
-
Motor Driver Board x1
-
Control Board x1
-
IR Receiver Module x1
-
M3x10mm Copper Pillar x8
-
M3x8mm Round-head Screw x1
-
M3x6mm Round-head Screw x16
-
M3x10mm Flat-head Screw x2
-
6 AA Battery Holder x1





Step 5: Mount the Top PCB
Prepare the parts as follows:
Bluetooth Module x1
M3x6MM Round-head Screw x6
Jumper Capx8




Step 6: Hook-up Guide




Important reminder: Please unplug the Bluetooth module before starting the upcoming lessons; otherwise, the program upload will fail.


8. Projects
The entire project starts with the basic program. The course will guide you step by step, from simple to complex, to program a robotic car while learning about electronics and mechanical concepts. I bet you’re already eager to give it a try. So, let’s get started!
Note: (G), marked on each sensor and module, is the negative pole and connected to “G”, ”-”or “GND”on the sensor shield or control board ; (V) is the positive pole and linked with V , VCC, + or 5V on the sensor shield or control board.
Experiments should be conducted in line with the wiring diagram, including the use of right components and the wiring methods. For example, the supply power applied in the hook-up diagram is external power , so you will have to use external power rather than USB cable.
Project 1: LED Blink

1. Description
For starters , LED Blink is a fundamental program. LED, the abbreviation of light emitting diodes, consists of Ga, As, P, N chemical compounds and so on. The LED can flash in diverse colors by altering the delay time in the test code. When in control, power on GND and VCC, the LED will be on if S end is in high level; nevertheless, it will go off.
2. Specification
-
Control interface: digital port
-
Working voltage: DC 3.3-5V
-
Pin spacing: 2.54mm
-
LED display color: red
3. What You Need

4. Wiring Diagram

The expansion board is stacked on development board; LED module is connected to G of shield;“+”is linked with 5V; S end is attached to D3.
5. Test Code:
/* keyestudio 4wd BT Car V2 lesson 1.1 Blink http://www.keyestudio.com */ void setup() { pinMode(9, OUTPUT); // initialize digital pin 3 as an output. } void loop() // the loop function runs over and over again forever { digitalWrite(9, HIGH); // turn the LED on (HIGH is the voltage level) delay(1000); // wait for a second digitalWrite(9, LOW); // turn the LED off by making the voltage LOW delay(1000); // wait for a second }
6. Test Result
Upload the program, LED blinks at the interval of 1s.
7. Code Explanation
pinMode(3,OUTPUT) — This function can denote that the pin is INPUT or OUTPUT
digitalWrite(3, HIGH) — When pin is OUTPUT, we can set it to HIGH(output 5V) or LOW(output 0V)
8. Extension Practice
We have succeeded in blinking LED. Next, let’s observe what will happen to the LED if we modify pins and delay time.
/* keyestudio 4wd BT Car V2 lesson 1.2 delay http://www.keyestudio.com */ void setup() { // initialize digital pin 11 as an output. pinMode(9, OUTPUT); } // the loop function runs over and over again forever void loop() { digitalWrite(9, HIGH); // turn the LED on (HIGH is the voltage level) delay(100); // wait for 0.1 second digitalWrite(9, LOW); // turn the LED off by making the voltage LOW delay(100); // wait for 0.1 second }
The test result shows that the LED flashes faster. Therefore, we can draw a conclusion that pins and time delaying affect flash frequency.
Project 2: LED PWM
1. Description
In previous lesson, we control LED on and off and make it blink.
In this project, we will control LED’s brightness through PWM simulating breathing effect. Similarly, you can change the step length and delay time in the code so as to demonstrate different breathing effects.
PWM is a means of controlling the analog output via digital means. Digital control is used to generate square waves with different duty cycles (a signal that constantly switches between high and low levels) to control the analog output.In general, the input voltages of ports are 0V and 5V. What if the 3V is required? Or a switch among 1V, 3V and 3.5V? We cannot change resistors constantly. For this reason, we resort to PWM.
For Arduino digital port voltage outputs, there are only LOW and HIGH levels, which correspond to the voltage outputs of 0V and 5V respectively. You can define LOW as’ 0 ‘and HIGH as’ 1’, and let the Arduino output five hundred ‘0’ or ‘1’ within 1 second. If output five hundred ‘1’, that is 5V; if all of which is ‘0’,that is 0V; if output 250 01 pattern, that is 2.5V.
This process can be likened to showing a movie. The movie we watch are not completely continuous. Actually, it generates 25 pictures per second, which cannot be told by human eyes. Therefore, we mistake it as a continuous process. PWM works in the same way. To output different voltages, we need to control the ratio of 0 and 1. The more ‘0’or ‘1’ output per unit time, the more accurate the control.
2. What You Need
3. Hook-up Diagram
4. Test Code:
/* keyestudio 4wd BT Car V2 lesson 2.1 pwm http://www.keyestudio.com */ int ledPin = 9; // Define the LED pin at D9 int value; void setup () { pinMode (ledPin, OUTPUT); // initialize ledpin as an output. } void loop () { for (value = 0; value <255; value = value + 1) { analogWrite (ledPin, value); // LED lights gradually light up delay (5); // delay 5MS } for (value = 255; value> 0; value = value-1) { analogWrite (ledPin, value); // LED gradually goes out delay (5); // delay 5MS } }
5. Test Result
Upload test code successfully, LED gradually changes from bright to dark, like human’s breath, rather than turning on and off immediately.
6. Code Explanation
To repeat some certain statements, we could use FOR statement.
FOR statement format is shown below:

FOR cyclic sequence:
Round 1:1 → 2 → 3 → 4
Round 2:2 → 3 → 4
…
Until number 2 is not established, “for”loop is over.
After knowing this order, go back to code:
for(int value = 0; value < 255; value=value+1){**
**…}
for (int value = 255; value >0; value=value-1){**
**…}
The two“for”statements make value increase from 0 to 255, then reduce from 255 to 0, then increase to 255,….infinitely loop
There is a new function in the following —– analogWrite()
We know that digital port only has two state of 0 and 1. So how to send an analog value to a digital value? Here,this function is needed. Let’s observe the Arduino board and find 6 pins marked“~”which can output PWM signals.
Function format as follows:
analogWrite(pin,value)
analogWrite() is used to write an analog value from 0~255 for PWM port, so the value is in the range of 0~255. Attention that you only write the digital pins with PWM function, such as pin 3, 5, 6, 9, 10, 11.
PWM is a technology to obtain analog quantity through digital method. Digital control forms a square wave, and the square wave signal only has two states of turning on and off (that is, high or low levels). By controlling the ratio of the duration of turning on and off, a voltage varying from 0 to 5V can be simulated. The time turning on(academically referred to as high level) is called pulse width, so PWM is also called pulse width modulation.
Through the following five square waves, let’s acknowledge more about PWM.
In the above figure, the green line represents a period, and value of analogWrite() corresponds to a percentage which is called Duty Cycle as well. Duty cycle implies that high-level duration is divided by low-level duration in a cycle. From top to bottom, the duty cycle of first square wave is 0% and its corresponding value is 0. The LED brightness is lowest, that is, light off. The more time the high level lasts, the brighter the LED. Therefore, the last duty cycle is 100%, which correspond to 255, and LED is the brightest. And 25% means darker.
PWM mostly is used for adjusting the LED’s brightness or the rotation speed of motors.
It plays a vital role in controlling smart robot cars. I believe that you cannot wait to learn next project.
7. Extension Practice:
Let’s modify the value of delay and remain the pin unchanged, then observe how LED changes.
/* keyestudio 4wd BT Car V2 lesson 2.2 pwm http://www.keyestudio.com */ int ledPin = 9; // Define the LED pin at D9 void setup(){ pinMode (ledPin, OUTPUT); // initialize ledpin as an output. } void loop(){ for (int value = 0; value <255; value = value + 1){ analogWrite (ledPin, value); // LED lights gradually light up delay (30); // delay 30MS } for(int value=255; value>0;value=value-1){ analogWrite (ledPin, value); // LED gradually goes out delay (30); // delay 30MS } }
Upload the code to development board, LED flashes more slowly.
Project 3: Servo Control

1. Description
Servo motor is a position control rotary actuator. It mainly consists of a housing, a circuit board, a core-less motor, a gear and a position sensor. Its working principle is that the servo receives the signal sent by MCU or receiver and produces a reference signal with a period of 20ms and width of 1.5ms, then compares the acquired DC bias voltage to the voltage of the potentiometer and obtain the voltage difference output.
When the motor speed is constant, the potentiometer is driven to rotate through the cascade reduction gear, which leads that the voltage difference is 0, and the motor stops rotating. Generally, the angle range of servo rotation is 0°–180 °
The rotation angle of servo motor is controlled by regulating the duty cycle of PWM (Pulse-Width Modulation) signal. The standard cycle of PWM signal is 20ms (50Hz). Theoretically, the width is distributed between 1ms-2ms, but in fact, it’s between 0.5ms-2.5ms. The width corresponds the rotation angle from 0° to 180°. But note that for different brand motors, the same signal may have different rotation angles.
In general, servo has three lines in brown, red and orange. The brown wire is grounded, the red one is a positive pole line and the orange one is a signal line.

The corresponding servo angles are shown below:

2. Specification
Working voltage: DC 4.8V ~ 6V
Operating angle range: about 180 ° (at 500 → 2500 μsec)
Pulse width range: 500 → 2500 μsec
No-load speed: 0.12 ± 0.01 sec / 60 (DC 4.8V) 0.1 ± 0.01 sec / 60 (DC 6V)
No-load current: 200 ± 20mA (DC 4.8V) 220 ± 20mA (DC 6V)
Stopping torque: 1.3 ± 0.01kg · cm (DC 4.8V) 1.5 ± 0.1kg · cm (DC 6V)
Stop current: ≦ 850mA (DC 4.8V) ≦ 1000mA (DC 6V)
Standby current: 3 ± 1mA (DC 4.8V) 4 ± 1mA (DC 6V)
3. What You Need

4. Connection Diagram:

Wiring note: the brown line of servo is linked with Gnd(G), the red line is connected to 5v(V) and orange line is attached to digit 10.
The servo has to be connected to external power due to its high demand for driving servo current. Generally, the current of a development board is not big enough. If without connected power, the development board could be burnt.
5. Test Code1
/* keyestudio 4wd BT Car V2 lesson 3.1 Servo http://www.keyestudio.com */ #define servoPin 10 //servo Pin int pos; //the angle variable of servo int pulsewidth; // pulse width variable of servo void setup() { pinMode(servoPin, OUTPUT); //set the pins of servo to output procedure(0); // set the angle of servo to 0 degree } void loop() { for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree procedure(pos); // tell servo to go to position in variable 'pos' delay(15); //control the rotation speed of servo } for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees procedure(pos); // tell servo to go to position in variable 'pos' delay(15); }} // function to control servo void procedure(int myangle) { pulsewidth = myangle * 11 + 500; //calculate the value of pulse width digitalWrite(servoPin,HIGH); delayMicroseconds(pulsewidth); //The duration of high level is pulse width digitalWrite(servoPin,LOW); delay((20 - pulsewidth / 1000)); // the cycle is 20ms, the low level last for the rest of time }
Upload code successfully, servo swings forth and back in the range of 0° to 180°
There is another guide for restraining servo—- servo library file, the following link of official website is for your reference.
https://www.arduino.cc/en/Reference/Servo
The library file of servo is used in the following code

6. Test Code2
/* keyestudio 4wd BT Car V2 lesson 3.2 servo http://www.keyestudio.com */ #include <Servo.h> Servo myservo; // create servo object to control a servo // twelve servo objects can be created on most boards int pos = 0; // variable to store the servo position void setup() { myservo.attach(10); // attaches the servo on pin 9 to the servo object } void loop() { for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position } }
7. Test Result
Upload code successfully and power on, servo swings in the range of 0° to 180°. The result is same. We usually control it by library file.
8. Code Explanation
Arduino comes with #include <Servo.h> (servo function and statement)
The following are some common statements of the servo function:
1. attach(interface)——Set servo interface, port 9 and 10 are available
2. write(angle)——The statement to set rotation angle of servo, the angle range is from 0° to 180°
3. read()——The statement to read angle of servo, read the command value of “write()”
4. attached()——Judge if the parameter of servo is sent to its interface
Note: The above written format is“servo variable name, specific statement()”, for instance: myservo.attach(9)
Project 4: 8×16 LED Face

1. Description
If we add a 8×16 LED board to the robot, it will be amazing. Keyestudio’s 8×16 dot matrix can meet your requirements. You can create facial emoticons, patterns or other interesting displays yourself. 8×16 LED light board comes with 128 LEDs. The data of the microprocessor (arduino) communicates with the AiP1640 through the two-wire bus interface, so as to control the 128 LEDs on the module, which produce the patterns you need on dot matrix. To facilitate wiring, we also provide a HX-2.54 4Pin wiring.
2. Specification
Working voltage: DC 3.3-5V
Power loss: 400mW
Oscillation frequency: 450KHz
Drive current: 200mA
Working temperature: -40~80℃
Communication method: two-wire bus
3. What You Need

4. 8×16 Dot Matrix Display
Circuit Graph:

The principle of 8×16 dot matrix:
How to control each led light of 8×16 dot matrix? We know that a byte has 8 bits, each bit is 0 or 1. When a bit is 0, turn off LED and when a bit is 0, turn on LED. Thereby, one byte can control the LED in a row of dot matrix, so 16 bytes can control 16 columns of led lights, that is, 8×16 dot matrix.
Interface Description and Communication Protocol:
The data of the microprocessor (arduino) communicates with the AiP1640 through the two-wire bus interface.
The communication protocol diagram is shown below:
(SCLK) is SCL, (DIN) is SDA:

①The starting condition for data input: SCL is high level and SDA changes from high to low.
②For data command setting, there are methods as shown in the figure below
In our sample program, select the way to add 1 to the address automatically, the binary value is 0100 0000 and the corresponding hexadecimal value is 0x40.
|
add 1 to the address automatically |
|---|
|
Fixed address |
|
Universal mode |
|
Test mode |

③For address command setting, the address can be selected as shown below.
The first 00H is selected in our sample program, and the binary number 1100 0000 corresponds to the hexadecimal 0xc0.

④The requirement for data input is that SCL is high level when inputting data, the signal on SDA must remain unchanged. Only when the clock signal on SCL is low level, the signal on SDA can be altered. The data input is low-order first, high-order is behind.
⑤ The condition to end data transmission is that when SCL is low, SDA is low, and when SCL is high, the SDA level also becomes high.
⑥ Display control, set different pulse width, the pulse width can be selected as shown below.
In the example, we choose pulse width 4/16, and the hexadecimal corresponds to 1000 1010 is 0x8A.

** 5. Introduction for Modulus Tool**
The online version of dot matrix modulus tool:
http://dotmatrixtool.com/#
①Open the link to enter the following page.

②The dot matrix is 8×16 in this project. So set the height to 8, width to 16, and select Big Endian; as shown below.

③ Generate hexadecimal data from the pattern
As shown below, the left button of the mouse is for selection while the right is for canceling. Thus you could use them to draw the pattern you want, then click Generate, to yield the hexadecimal data needed.

The generated hexadecimal code is what will be displayed, so you need to save it for next procedure.
6. Connection Diagram

Wiring note: The GND, VCC, SDA, and SCL of the 8×16 LED panel are respectively connected to -(GND), + (VCC), A4 and A5 of the keyestudio sensor expansion board for two-wire serial communication. (Note: This pin is connected to Arduino IIC, but this module is not IIC communication, it can be linked with any two pins.)
7. Test Code
The code that shows smile face
/* keyestudio 4wd BT Car V2.0 lesson 4.1 matrix http://www.keyestudio.com */ //get the data of smile pattern in the modulus tool unsigned char smile[] = {0x00, 0x00, 0x1c, 0x02, 0x02, 0x02, 0x5c, 0x40, 0x40, 0x5c, 0x02, 0x02, 0x02, 0x1c, 0x00, 0x00}; #define SCL_Pin A5 //Set clock pin to A5 #define SDA_Pin A4 //Set data pin to A4 void setup(){ //Set pin to output pinMode(SCL_Pin,OUTPUT); pinMode(SDA_Pin,OUTPUT); //Clear the matrix display //matrix_display(clear); } void loop(){ matrix_display(smile); //display smile pattern } //this function is used for dot matrix display void matrix_display(unsigned char matrix_value[]) { IIC_start(); //the function to call the data transmission IIC_send(0xc0); //Select address for(int i = 0;i < 16;i++) //Pattern data has 16 bytes { IIC_send(matrix_value[i]); //data to convey patterns } IIC_end(); //end the transmission of patterns data IIC_start(); IIC_send(0x8A); //display control, set pulse width to 4/16 IIC_end(); } // the condition that data transmission starts void IIC_start() { digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); } // transmit data void IIC_send(unsigned char send_data) { for(char i = 0;i < 8;i++) //Every character has 8 bits { digitalWrite(SCL_Pin,LOW); //pull down the SCL_Pin to change the signal of SDA delayMicroseconds(3); if(send_data & 0x01) //1 or 0 of byte is used to set high and low level of SDA_Pin { digitalWrite(SDA_Pin,HIGH); } else { digitalWrite(SDA_Pin,LOW); } delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); //Pull up SCL_Pin to stop data transmission delayMicroseconds(3); send_data = send_data >> 1; //Detect bit by bit, so move the data right by one bit } } //the sign that data transmission ends void IIC_end() { digitalWrite(SCL_Pin,LOW); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); }
8. Test Result
After uploading code on keyestudio V4.0 development board, hook up by the connection diagram, the DIP switch is dialed to right end, then a smile pattern is shown.

9. Extension Practice
We use the modulo tool(http://dotmatrixtool.com/#)to make the dot matrix alternately display start, forward and stop patterns then clear the patterns, and the time interval is 2000 milliseconds.




Get the graphical code to be displayed via modulus tool
xxStart:xx0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01
Go front:
0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00
Go back:
0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00
Turn left:
0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00
Turn right:
0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00
Stop:
0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00
Clear the matrix display:
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00

The code that the multiple patterns shift:
/* keyestudio 4WD Robot v2.0 lesson 4.2 matrix http://www.keyestudio.com */ //Array, used to store the data of pattern, can be calculated by yourself or obtained from the modulus tool unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01}; unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char back[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00}; unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00}; unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}; #define SCL_Pin A5 //Set clock pin to A5 #define SDA_Pin A4 //Set data pin to A4 void setup(){ //Set pin to output pinMode(SCL_Pin,OUTPUT); pinMode(SDA_Pin,OUTPUT); //Clear the matrix display matrix_display(clear); } void loop(){ matrix_display(start01); //Display start pattern delay(2000); matrix_display(front); ///Front pattern delay(2000); matrix_display(STOP01); //Stop pattern delay(2000); matrix_display(clear); //Clear the matrix display delay(2000); } //this function is used for dot matrix display void matrix_display(unsigned char matrix_value[]) { IIC_start(); //the function to call the data transmission IIC_send(0xc0); //Select address for(int i = 0;i < 16;i++) //Pattern data has 16 bytes { IIC_send(matrix_value[i]); //data to convey patterns } IIC_end(); //end the transmission of patterns data IIC_start(); IIC_send(0x8A); //display control, set pulse width to 4/16 IIC_end(); } // the condition that data transmission starts void IIC_start() { digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); } // transmit data void IIC_send(unsigned char send_data) { for(char i = 0;i < 8;i++) //Every character has 8 bits { digitalWrite(SCL_Pin,LOW); //pull down the SCL_Pin to change the signal of SDA delayMicroseconds(3); if(send_data & 0x01) //1 or 0 of byte is used to set high and low level of SDA_Pin { digitalWrite(SDA_Pin,HIGH); } else { digitalWrite(SDA_Pin,LOW); } delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); //Pull up SCL_Pin to stop data transmission delayMicroseconds(3); send_data = send_data >> 1; //Detect bit by bit, so move the data right by one bit } } //the sign that data transmission ends void IIC_end() { digitalWrite(SCL_Pin,LOW); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); }
Upload code on development board, 8*16 dot matrix display shows front, back and stop patterns, alternately.


Project 5: Drive Robot

1. Description
There are many ways to drive a motor. Our robot car uses the most common solution–L298P–which is an excellent high-power motor driver IC produced by STMicroelectronics. It can directly drive DC motors, two-phase and four-phase stepping motors. The driving current is up to 2A, and the output terminal of motor adopts eight high-speed Schottky diodes as protection.
We designed a shield based on the circuit of L298p.
The stacked design reduces the technical difficulty of using and driving the motor.


2. Specification
Circuit Diagram for L298P Board
-
Logic part input voltage: DC5V
-
Driving part input voltage: DC 7-12V
-
Logic part working current: < 36mA
-
Driving part working current: < 2A
-
Maximum power dissipation: 25W (T=75℃)
-
Working temperature: -25℃~+130℃
-
Control signal input level: high level 2.3V< Vin< 5V, low level-0.3V< Vin< 1.5V
3. Drive Robot to Move
The driver of motor driver shield is in parallel connection. You could control the direction of motors by altering the orientation of jumper caps(seen in the picture).

From the above diagram, it is known that the direction pin of B motor is D4; speed pin is D5; D2 is the direction pin of A motor; and D9 is speed pin.
PWM decides 2 motors to rotate so as to drive robot car. The PWM value is in the range of 0-255. The larger the number, the faster the rotation of the motor.
|
4WD Robot |
Motor (A) |
Motor (B) |
|---|---|---|
|
Forward |
Turn clockwise |
|
|
Backward |
Turn anticlockwise |
|
|
Rotate to left |
Turn anticlockwise |
Turn clockwise |
|
Rotate to right |
Turn clockwise |
Turn anticlockwise |
|
Stop |
Stop |
Stop |
4. What You Need

5. Connection Diagram

Attention: please connect motors in compliance with the above connection diagram
6. Test Code
/* keyestudio 4wd BT Car V2.0 lesson 5.1 motor driver shield http://www.keyestudio.com */ #define ML_Ctrl 4 // define the direction control pin of B motor #define ML_PWM 5 //define the PWM control pin of B motor #define MR_Ctrl 2 //define direction control pin of A motor #define MR_PWM 6 //define the PWM control pin of A motor void setup() { pinMode(ML_Ctrl, OUTPUT); //define direction control pin of B motor as output pinMode(ML_PWM, OUTPUT); //define PWM control pin of B motor as output pinMode(MR_Ctrl, OUTPUT); //define direction control pin of A motor as output. pinMode(MR_PWM, OUTPUT); //define the PWM control pin of A motor as output } void loop() { digitalWrite(ML_Ctrl,HIGH); //set the direction control pin of B motor to HIGH analogWrite(ML_PWM,200); //set the PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,HIGH); //set the direction control pin of A motor to HIGH analogWrite(MR_PWM,200); //set the PWM control speed of A motor to 200 //front delay(2000);//delay in 2s digitalWrite(ML_Ctrl,LOW); //set the direction control pin of B motor to LOW analogWrite(ML_PWM,200); //set the PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,LOW); //set the direction control pin of A motor to LOW analogWrite(MR_PWM,200); //set the PWM control speed of A motor to 200 //back delay(2000);//delay in 2s digitalWrite(ML_Ctrl,LOW); //set the direction control pin of B motor to LOW analogWrite(ML_PWM,200); //set the PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,HIGH); //set the direction control pin of A motor to HIGH analogWrite(MR_PWM,200); //set the PWM control speed of A motor to 200 //left delay(2000);//delay in 2s digitalWrite(ML_Ctrl,HIGH); //set the direction control pin of B motor to HIGH analogWrite(ML_PWM,200); //set the PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,LOW); // set the direction control pin of A motor to LOW analogWrite(MR_PWM,200); //set the PWM control speed of A motor to 200 //right delay(2000); //delay in 2s analogWrite(ML_PWM,0); //set the PWM control speed of B motor to 0 analogWrite(MR_PWM,0); //set the PWM control speed of A motor to 0 //stop delay(2000); //delay in 2s }
7. Test Result
Hook up by connection diagram, upload code and power on, smart car goes forward and back for 2s, turns left and right for 2s, and stops for 2s alternately.
8. Code Explanation
digitalWrite(ML_Ctrl,LOW): the rotation direction of motor is decided by the high/low level and and the pins that decide rotation direction are digital pins.
analogWrite(ML_PWM,200): the speed of motor is regulated by PWM, and the pins that decide the speed of motor must be PWM pins.
9. Extension Practice
Adjust the speed that PWM controls the motor, hook up in same way
/* keyestudio 4wd BT Car V2.0 lesson 5.2 motor driver http://www.keyestudio.com */ #define ML_Ctrl 4 //define the direction control pin of B motor #define ML_PWM 5 //define the PWM control pin of B motor #define MR_Ctrl 2 //define the direction control pin of A motor #define MR_PWM 6 //define the PWM control pin of A motor void setup() { pinMode(ML_Ctrl, OUTPUT);//set direction control pin of B motor to OUTPUT pinMode(ML_PWM, OUTPUT);//set the PWM control pin of B motor to OUTPUT pinMode(MR_Ctrl, OUTPUT);//set the direction control pin of A motor to OUTPUT pinMode(MR_PWM, OUTPUT);//set PWM control pin of A motor to OUTPUT } void loop() { digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH level analogWrite(ML_PWM,250);//Set PWM control speed of B motor to 100 digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH level analogWrite(MR_PWM,250);//Set PWM control speed of A motor to 100 //front delay(2000);//delay in 2s digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW analogWrite(ML_PWM,250);//Set PWM control speed of B motor to 100 digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW analogWrite(MR_PWM,250);//Set PWM control speed of A motor to 100 //back delay(2000);//delay in 2s digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW analogWrite(ML_PWM,250);//Set PWM control speed of B motor to 100 digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH level analogWrite(MR_PWM,250);//Set PWM control speed of A motor to 100 //left delay(2000);//delay in 2s digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH level analogWrite(ML_PWM,250);//Set PWM control speed of B motor to 100 digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW analogWrite(MR_PWM,250);//Set PWM control speed of A motor to 100 //right delay(2000);//delay in 2s analogWrite(ML_PWM,0);//set PWM control speed of B motor to 0 analogWrite(MR_PWM,0);//set PWM control speed of A motor to 0 //stop delay(2000);//delay in 2s }
After uploading the code successfully, do you find the motors rotate faster?
Project 6 : Line Tracking Sensor
1. Description:

The tracking sensor is actually an infrared sensor. The component used here is the TCRT5000 infrared tube.
Its working principle is to use different reflectivity of infrared light to colors, then convert the strength of the reflected signal into a current signal.
During the process of detection, black is active at HIGH level while white is active at LOW level. The detection height is 0-3 cm.
Keyestudio 3-channel line tracking module has integrated 3 sets of TCRT5000 infrared tube on a single board, which is more convenient for wiring and control.
By rotating the adjustable potentiometer on the sensor, it can adjust the detection sensitivity of the sensor.
2. Specification:
Operating Voltage: 3.3-5V (DC)
Interface: 5PIN
Output Signal: Digital signal
Detection Height: 0-3 cm
3. What You Need:


Special note: before testing, turn the potentiometer on the sensor to adjust the detection sensitivity. When adjust the LED at the threshold between ON and OFF, the sensitivity is the best.

4. Connection Diagram:

5. Test Code:
/* keyestudio 4wd BT Car V2 lesson 6.1 Line Track sensor http://www.keyestudio.com */ int L_pin = 11; //pins of left line tracking sensor int M_pin = 7; //pins of middle line tracking sensor int R_pin = 8; //pins of right line tracking sensor int val_L,val_R,val_M;// define these variables void setup() { Serial.begin(9600); // initialize serial communication at 9600 bits per second pinMode(L_pin,INPUT); // make the L_pin as an input pinMode(M_pin,INPUT); // make the M_pin as an input pinMode(R_pin,INPUT); // make the R_pin as an input } void loop() { val_L = digitalRead(L_pin);//read the L_pin: val_R = digitalRead(R_pin);//read the R_pin: val_M = digitalRead(M_pin);//read the M_pin: Serial.print("left:"); Serial.print(val_L); Serial.print(" middle:"); Serial.print(val_M); Serial.print(" right:"); Serial.println(val_R); delay(500);// delay in between reads for stability }
6. Test Result:
Upload the code on development board, open serial monitor to check line tracking sensors. And the displayed value is 1(high level) when no signals are received. The value shifts into 0 when the sensor is covered with paper.


7. Code Explanation
Serial.begin(9600)— Initialize serial port, set baud rate to 9600
pinMode- Define the pin as input or output mode
xxdigitalRead-xxRead the state of pin, which are generally HIGH and LOW level
8. Extension Practice
After knowing its working principle, you can connect an LED to D3. so as to control LED by line tracking sensor.

Test Code
/* keyestudio 4wd BT Car V2 lesson 6.2 Line Track sensor http://www.keyestudio.com */ int L_pin = 11; //pins of left line tracking sensor int M_pin = 7; //pins of middle line tracking sensor int R_pin = 8; //pins of right line tracking sensor int val_L,val_R,val_M;// define the variables of three sensors void setup() { Serial.begin(9600); // initialize serial communication at 9600 bits per second pinMode(L_pin,INPUT); // make the L_pin as an input pinMode(M_pin,INPUT); // make the M_pin as an input pinMode(R_pin,INPUT); // make the R_pin as an input pinMode(9, OUTPUT); } void loop() { val_L = digitalRead(L_pin);//read the L_pin: val_R = digitalRead(R_pin);//read the R_pin: val_M = digitalRead(M_pin);//read the M_pin: Serial.print("left:"); Serial.print(val_L); Serial.print(" middle:"); Serial.print(val_M); Serial.print(" right:"); Serial.println(val_R); if (val_L == HIGH)//if left line tracking sensor detects signals { digitalWrite(9, LOW);//LED is off } else//if left line tracking sensor doesn’t detect signals { digitalWrite(9, HIGH);//LED lights up delay(2000); } if (val_R == HIGH)//if right line tracking sensor detects signals { digitalWrite(9, LOW);//LED is off } else//if right line tracking sensor doesn’t detect signals { digitalWrite(9, HIGH);//LED lights up delay(2000); } if (val_M == HIGH)//if middle line tracking sensor detects signals { digitalWrite(9, LOW);//LED is off } else//if middle line tracking sensor doesn’t detect signals { digitalWrite(9, HIGH);//LED lights up delay(2000); } }
Upload the code to development board, we could observe the brightness of LED when covering the line tracking sensor or getting close to it by hand.
Project 7: Line Tracking Robot

1. Description
The previous projects are inclusive of the knowledge of multiple sensors and modules. Next, we will work on a little challenging task.
Based on the working principle of the line tracking sensor we could make a line tracking car.
Line tracking robot car:
Flow Chart

2. Connection Diagram

3. Test Code
/* keyestudio 4wd BT Car V2.0 lesson 7 Line Tracking Robot http://www.keyestudio.com */ #define ML_Ctrl 4 //define direction control pin of B motor #define ML_PWM 5 //define PWM control pin of B motor #define MR_Ctrl 2 //define direction control pin of A motor #define MR_PWM 6 //define PWM control pin of A motor const int sensor_l = 11;//define the pin of left line tracking sensor const int sensor_c = 7;//define the pin of middle line tracking sensor const int sensor_r = 8;//define the pin of right line tracking sensor int l_val,c_val,r_val;//define these variables void setup() { Serial.begin(9600);//start serial monitor and set baud rate to 9600 pinMode(ML_Ctrl, OUTPUT);//set direction control pin of B motor pinMode(ML_PWM, OUTPUT);//set PWM control pin of B motor to OUTPUT pinMode(MR_Ctrl, OUTPUT);//set direction control pin of A motor to OUTPUT pinMode(MR_PWM, OUTPUT);//set PWM control pin of A motor to OUTPUT pinMode(sensor_l,INPUT);//set the pins of left line tracking sensor to INPUT pinMode(sensor_c,INPUT);//set the pins of middle line tracking sensor to INPUT pinMode(sensor_r,INPUT);//set the pins of right line tracking sensor to INPUT } void loop() { tracking(); //run main program } void tracking() { l_val = digitalRead(sensor_l);//read the value of left line tracking sensor c_val = digitalRead(sensor_c);//read the value of middle line tracking sensor r_val = digitalRead(sensor_r);//read the value of right line tracking sensor if(c_val == 1)//if the state of middle one is 1, which means detecting black line { front();//car goes forward } else { if((l_val == 1)&&(r_val == 0))//if only left line tracking sensor detects black trace { left();//car turns left } else if((l_val == 0)&&(r_val == 1))//if only right line tracking sensor detects black trace { right();//car turns right } else// if left and right line tracking sensors detect black trace or they don’t read { Stop();//car stops } } } void front()//define the status of going forward { digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH analogWrite(ML_PWM,70);//set PWM control speed of B motor to 70 digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH analogWrite(MR_PWM,70);//set PWM control speed of A motor to 70 } void back()//define the state of going back { digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void left()//car turns left { digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH level analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void right()//define the right-turning state { digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH level analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void Stop()//define the state of stop { analogWrite(ML_PWM,0);//set PWM control speed of B motor to 0 analogWrite(MR_PWM,0);//set PWM control speed of A motor to 0 }
4. Test Result
Upload the code on the keyestudio V4.0 board successfully. Stack the expansion board on the keyestudio V4.0 board and wire it according to connection diagram. After power-on, the DIP switch will be dialed to the “ON” end, and the smart car can walk along the black line.
Project 8: Ultrasonic Sensor
1. Description

The HC-SR04 ultrasonic sensor uses sonar to determine distance to an object like what bats do. It offers excellent non-contact range detection with high accuracy and stable readings in an easy-to-use package. It comes complete with ultrasonic transmitter and receiver modules.
The HC-SR04 or the ultrasonic sensor is being used in a wide range of electronics projects for creating obstacle detection and distance measuring application as well as various other applications. Here we have brought the simple method to measure the distance with arduino and ultrasonic sensor and how to use ultrasonic sensor with arduino.
2. Specification
Power Supply :+5V DC
Quiescent Current : < 2mA
Working Current: 15mA
Effectual Angle: < 15°
Ranging Distance : 2cm – 400 cm
Resolution : 0.3 cm
Measuring Angle: 30 degree
Trigger Input Pulse width: 10uS
3. What You Need
4. The principle of ultrasonic sensor
As the above picture shown, it is like two eyes. One is transmitting end, the other is receiving end.
The ultrasonic module will emit the ultrasonic waves after triggering a signal. When the ultrasonic waves encounter the object and are reflected back, the module outputs an echo signal, so it can determine the distance of the object from the time difference between the trigger signal and echo signal.
The t is the time that emitting signal meets obstacle and returns. And the propagation speed of sound in the air is about 343m/s, and distance = speed x time. However, the ultrasonic wave emits and comes back, which is 2 times of distance.
Therefore, it needs to be divided by 2, the distance measured by ultrasonic wave = (speed x time)/2
-
Use method and timing chart of ultrasonic module:
-
Setting the delay time of Trig pin of SR04 to 10μs at least, which can trigger it to detect distance.
-
After triggering, the module will automatically send eight 40KHz ultrasonic pulses and detect whether there is a signal return. This step will be completed automatically by the module.
-
If the signal returns, the Echo pin will output a high level, and the duration of the high level is the time from the transmission of the ultrasonic wave to the return.

Circuit diagram of ultrasonic sensor:

5. Connection Diagram

Wiring guide:
Ultrasonic sensor keyestudio V5 Sensor Shield
VCC → 5v(V)
Trig → 12(S)
Echo → 13(S)
Gnd → Gnd(G)
6. Test Code
/* keyestudio 4wd BT Car V2 lesson 8.1 Ultrasonic sensor http://www.keyestudio.com */ int trigPin = 12; // Trigger int echoPin = 13; // Echo long duration, cm, inches; void setup() { //Serial Port begin Serial.begin (9600); //Define inputs and outputs pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); } void loop() { // The sensor is triggered by a HIGH pulse of 10 or more microseconds. // Give a short LOW pulse beforehand to ensure a clean HIGH pulse: digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // Read the signal from the sensor: a HIGH pulse whose // duration is the time (in microseconds) from the sending // of the ping to the reception of its echo off of an object. duration = pulseIn(echoPin, HIGH); // Convert the time into a distance cm = (duration/2) / 29.1; // Divide by 29.1 or multiply by 0.0343 inches = (duration/2) / 74; // Divide by 74 or multiply by 0.0135 Serial.print(inches); Serial.print("in, "); Serial.print(cm); Serial.print("cm"); Serial.println(); delay(50); }
7. Test Result
Upload test code on the development board, open serial monitor and set baud rate to 9600. The detected distance will be displayed, and the unit is cm and inch. Hinder the ultrasonic sensor by hand, the displayed distance value gets smaller.

8. Code Explanation
int trigPin- this pin is defined to transmit ultrasonic waves, generally output.
int echoPin — this is defined as the pin of reception, generally input
cm = (duration/2) / 29.1-unit is cm
inches = (duration/2) / 74-unit is inch
We can calculate the distance by using the following formula:
distance = (traveltime/2) x speed of sound
The speed of sound is: 343m/s = 0.0343 cm/uS = 1/29.1 cm/uS
Or in inches: 13503.9in/s = 0.0135in/uS = 1/74in/uS
We need to divide the traveltime by 2 because we have to take into account that the wave was sent, hit the object, and then returned back to the sensor.
9. Extension Practice:
We have just measured the distance displayed by the ultrasonic. How about controlling the LED with the measured distance? Let’s try it and connect an LED light module to the D3 pin.

/* keyestudio 4wd BT Car V2 lesson 8.2 Ultrasonic LED http://www.keyestudio.com */ int trigPin = 12; // Trigger int echoPin = 13; // Echo long duration, cm, inches; void setup() { Serial.begin (9600); //Serial Port begin pinMode(trigPin, OUTPUT); //Define inputs and outputs pinMode(echoPin, INPUT); pinMode(9, OUTPUT); } void loop() { // The sensor is triggered by a HIGH pulse of 10 or more microseconds. // Give a short LOW pulse beforehand to ensure a clean HIGH pulse: digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // Read the signal from the sensor: a HIGH pulse whose // duration is the time (in microseconds) from the sending // of the ping to the reception of its echo off of an object. duration = pulseIn(echoPin, HIGH); // Convert the time into a distance cm = (duration/2) / 29.1; // Divide by 29.1 or multiply by 0.0343 inches = (duration/2) / 74; // Divide by 74 or multiply by 0.0135 Serial.print(inches); Serial.print("in, "); Serial.print(cm); Serial.print("cm"); Serial.println(); delay(50); if (cm>=2 && cm<=10) digitalWrite(9, HIGH); else digitalWrite(9, LOW); }
Upload test code to development board and block ultrasonic sensor by hand, then check if LED is on.
Project 9: Ultrasonic Follow Robot

1. Description
We can combine the hardware knowledge of various sensors, modules, motor drives to build an ultrasonic following robot car!
In the circuit process, we can make use of ultrasonic sensors to detect the distance between a robot car and obstacles so as to control the robot car to move by the measured distance . And dot matrix shows a smile facial pattern.
The specific logic of ultrasonic follow robot car is shown below:
|
Detection |
Measured distance of front obstacles |
|---|---|
|
Condition |
Distance<8 |
|
Status |
Go back(PWM set to 100) |
|
Condition |
distance≥8 and distance<13 |
|
Status |
Stop |
|
Condition |
distance≥13 and distance<35 |
|
Status |
Go front(PWM set to 100) |
|
Condition |
distance≥35 |
|
Status |
stop |
Distance(unit:cm)
2. Flow Chart

3. Hook-up Diagram

4. Test Code
/* keyestudio 4wd BT Car V2.0 lesson 9 Ultrasonic Follow Robot http://www.keyestudio.com */ #define ML_Ctrl 4 //define direction control pin of B motor #define ML_PWM 5 //define PWM control pin of B motor #define MR_Ctrl 2 //define direction control pin of A motor #define MR_PWM 6 //define PWM control pin of A motor #include "SR04.h" //define the function library of ultrasonic sensor #define TRIG_PIN 12// set the signal input of ultrasonic sensor to D12 #define ECHO_PIN 13//set the signal output of ultrasonic sensor to D13 SR04 sr04 = SR04(ECHO_PIN,TRIG_PIN); long distance; void setup() { Serial.begin(9600);//open serial monitor and set baud rate to 9600 pinMode(ML_Ctrl, OUTPUT);//set direction control pin of B motor to OUTPUT pinMode(ML_PWM, OUTPUT);//set PWM control pin of B motor to OUTPUT pinMode(MR_Ctrl, OUTPUT);//set direction control pin of A motor to OUTPUT pinMode(MR_PWM, OUTPUT);//set PWM control pin of A motor to OUTPUT pinMode(TRIG_PIN,OUTPUT);// set TRIG_PIN to OUTPUT pinMode(ECHO_PIN,INPUT);// set ECHO_PIN to INPUT } void loop() { distance = sr04.Distance();// the distance detected by ultrasonic sensor if(distance<8)//if distance is less than 8 { back();//go back } else if((distance>=8)&&(distance<13))// if 8≤distance<13 { Stop();//stop } else if((distance>=13)&&(distance<35))//if 13≤distance<35 { front();//follow } else//otherwise { Stop();//stop } } void front()//go front { digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH analogWrite(ML_PWM,100);//Set PWM control speed of B motor to 100 digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH analogWrite(MR_PWM,100);//Set PWM control speed of A motor to 100 } void back()//go back { digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW analogWrite(ML_PWM,100);//Set PWM control speed of B motor to 100 digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW analogWrite(MR_PWM,100);//Set PWM control speed of A motor to 100 } void Stop()//stop { analogWrite(ML_PWM,0);//set PWM control speed of B motor to 0 analogWrite(MR_PWM,0);//set PWM control speed of A motor to 0 }
5. Test Result
Uploading the code to the development board, and plugging in, dot matrix will display a smile facial pattern and follow the obstacle to move.
Project 10: Ultrasonic Avoiding Robot

1. Description
We combine the hardware knowledge – LED matrix, motor drive, ultrasonic and servo, to build an ultrasonic avoiding robot! In the circuit process, we can make use of ultrasonic sensor to detect the distance between robot and front obstacles. Control the motor rotating by measured data, thus control the robot motion and show the running state by dot matrix. The ultrasonic avoiding capability is almost the same as the ultrasonic following function. We only need to change the source code. The specific logic of ultrasonic avoiding smart car is as shown below:


Flow Chart

2. Connection Diagram

3. Test Code
/* keyestudio 4wd BT Car V2.0 lesson 10 ultrasonic avoiding robot http://www.keyestudio.com */ //Array, used to store the data of pattern, can be calculated by yourself or obtained from the modulus tool unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00}; unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00}; unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}; #define SCL_Pin A5 //Set clock pin to A5 #define SDA_Pin A4 //Set data pin to A4 #define ML_Ctrl 4 //define direction control pin of B motor #define ML_PWM 5 //define PWM control pin of B motor #define MR_Ctrl 2 //define direction control pin of A motor #define MR_PWM 6 //define PWM control pin of A motor #include "SR04.h"//define the library of ultrasonic sensor #define TRIG_PIN 12// set the signal input of ultrasonic sensor to D12 #define ECHO_PIN 13//set the signal output of ultrasonic sensor to D13 SR04 sr04 = SR04(ECHO_PIN,TRIG_PIN); long distance,a1,a2;//define three distance const int servopin = 10;//set the pin of servo to D10 void setup() { Serial.begin(9600);//open serial monitor and set baud rate to 9600 pinMode(ML_Ctrl, OUTPUT);//set direction control pin of B motor to OUTPUT pinMode(ML_PWM, OUTPUT);//set PWM control pin of B motor to OUTPUT pinMode(MR_Ctrl, OUTPUT);//set direction control pin of A motor to OUTPUT pinMode(MR_PWM, OUTPUT);//set PWM control pin of A motor to OUTPUT servopulse(servopin,90);// the angle of servo is 90 degree delay(300); pinMode(SCL_Pin,OUTPUT);// set clock pin to OUTPUT pinMode(SDA_Pin,OUTPUT);//set data pin to OUTPUT matrix_display(clear);// Clear the matrix display } void loop() { avoid();//run the main program } void avoid() { distance=sr04.Distance(); //obtain the value detected by ultrasonic sensor if((distance < 20)&&(distance > 0))//if the distance is greater than 0 and less than 20 { car_Stop();//stop matrix_display(STOP01); //show stop pattern delay(100); servopulse(servopin,180);//servo rotates to 180° delay(500); a1=sr04.Distance();//measure the distance delay(100); servopulse(servopin,0);//rotate to 0 degree delay(500); a2=sr04.Distance();//measure the distance delay(100); if(a1 > a2)//if distance a1 is greater than a2 { car_left();//turn left matrix_display(left); //display left-turning pattern servopulse(servopin,90);//servo rotates to 90 degree delay(300); matrix_display(front); //show forward pattern } else//if the right distance is greater than the left { car_right();// turn right matrix_display(right); // display right-turning pattern servopulse(servopin,90);// servo rotates to 90 degree delay(300); matrix_display(front); //show forward pattern } } else//otherwise { car_front();//go forward matrix_display(front); // show forward pattern } } void servopulse(int servopin,int myangle)//the running angle of servo { for(int i=0; i<30; i++) { int pulsewidth = (myangle*11)+500; digitalWrite(servopin,HIGH); delayMicroseconds(pulsewidth); digitalWrite(servopin,LOW); delay(20-pulsewidth/1000); } } void car_front()//car goes forward { digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH level analogWrite(ML_PWM,150);//set PWM control speed of B motor to 150 digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH level analogWrite(MR_PWM,150);//set PWM control speed of A motor to 150 } void car_back()//go back { digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void car_left()//car turns left { digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void car_right()//car turn rights { digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void car_Stop()//car stops { digitalWrite(ML_Ctrl,LOW); analogWrite(ML_PWM,150); digitalWrite(MR_Ctrl,LOW); analogWrite(MR_PWM,150); delay(50); analogWrite(ML_PWM,0);//set PWM control speed of B motor to 0 analogWrite(MR_PWM,0);//set PWM control speed of A motor to 0 } //this function is used for dot matrix display void matrix_display(unsigned char matrix_value[]) { IIC_start(); //the function to call the data transmission IIC_send(0xc0); //Select address for(int i = 0;i < 16;i++) //Pattern data has 16 bytes { IIC_send(matrix_value[i]); //data to convey patterns } IIC_end(); //end the transmission of patterns data IIC_start(); IIC_send(0x8A); //display control, set pulse width to 4/16 IIC_end(); } // the condition that data transmission starts void IIC_start() { digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); } // transmit data void IIC_send(unsigned char send_data) { for(char i = 0;i < 8;i++) //Every character has 8 bits { digitalWrite(SCL_Pin,LOW); //pull down the SCL_Pin to change the signal of SDA delayMicroseconds(3); if(send_data & 0x01) //1 or 0 of byte is used to set high and low level of SDA_Pin { digitalWrite(SDA_Pin,HIGH); } else { digitalWrite(SDA_Pin,LOW); } delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); //Pull up SCL_Pin to stop data transmission delayMicroseconds(3); send_data = send_data >> 1; //Detect bit by bit, so move the data right by one bit } } //the sign that data transmission ends void IIC_end() { digitalWrite(SCL_Pin,LOW); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); }
4. Test Result
Upload the code on the keyestudio V4.0 board and wire according to connection diagram. After the DIP switch is dialed to the right end, the smart car can automatically avoid obstacles.
Project 11: IR remote control
1. Description
There is no doubt that infrared remote control is ubiquitous in daily life. It is used to control various household appliances, such as TVs, stereos, video recorders and satellite signal receivers. Infrared remote control is composed of infrared transmitting and infrared receiving systems, that is, an infrared remote control and infrared receiving module and a single-chip microcomputer capable of decoding.

The 38K infrared carrier signal emitted by remote controller is encoded by the encoding chip in the remote controller. It is composed of a section of pilot code, user code, user inverse code, data code, and data inverse code. The time interval of the pulse is used to distinguish whether it is a 0 or 1 signal and the encoding is made up of these 0, 1 signals.
The user code of the same remote control is unchanged while the data code can distinguish the key.
When the remote control button is pressed, the remote control sends out an infrared carrier signal. When the IR receiver receives the signal, the program will decode the carrier signal and determines which key is pressed. The MCU decodes the received 01 signal, thereby judging what key is pressed by the remote control.
Infrared receiver we use is an infrared receiver module. Mainly composed of an infrared receiver head, which is a device that integrates reception, amplification, and demodulation. Its internal IC has completed demodulation, and can achieve from infrared reception to output and be compatible with TTL signals. Additionally, it is suitable for infrared remote control and infrared data transmission. The infrared receiving module made by the receiver has only three pins, signal line, VCC and GND. It is very convenient to communicate with arduino and other microcontrollers.
2. Specification

Operating Voltage: 3.3-5V(DC)
Interface: 3PIN
Output Signal: Digital signal
Receiving Angle: 90 degrees
Frequency: 38khz
Receiving Distance: 10m
3. What You Need

4. Connection Diagram

Respectively link“-”,“+”and S of IR receiver module with G(GND), V(VCC)and A0 of keyestudio development board.
Attention: On the condition that digital ports are not available, analog ports can be regarded as digital ports. A0 equals to D14, A1 is equivalent to digital 15.
5. Test Code
Firstly import library file of IR receiver module(refer to how to import Arduino library file) before designing code.
/* keyestudio 4wd BT Car V2 lesson 11.1 IRremote http://www.keyestudio.com */ #include <IRremote.h> // IRremote library statement int RECV_PIN = 3; //define the pins of IR receiver as 3 IRrecv irrecv(RECV_PIN); decode_results results; // decode results exist in the“result” of “decode results” void setup() { Serial.begin(9600); irrecv.enableIRIn(); // Enable receiver } void loop() { if (irrecv.decode(&results)) //decode successfully, receive a set of infrared signals { Serial.println(results.value, HEX);//Wrap word in 16 HEX to output and receive code irrecv.resume(); // Receive the next value } delay(100); }
6. Test Result
Upload test code, open serial monitor and set baud rate to 9600, point remote control to IR receiver and the corresponding value will be shown. If pressing too long, the error codes will appear.

Below we have listed out each button value of keyestudio remote control. So you can keep it for reference.

7. Code Explanation
irrecv.enableIRIn(): after enabling IR decoding, the IR signals will be received, then function“decode()”will check continuously if decode successfully.
irrecv.decode(&results): after decoding successfully, this function will come back to “true”, and keep result in “results”. After decoding a IR signals, run the resume()function and receive the next signal.
8. Extension Practice
We decoded the key value of IR remote control. How about controlling LED by the measured value? We could design an experiment.
Attach an LED to D3, then press the keys of remote control to make LED light on and off.

/* keyestudio 4wd BT Car V2 lesson 11.2 IRremote http://www.keyestudio.com */ #include <IRremote.h> int RECV_PIN = 3; //define the pin of IR receiver as 3 int LED_PIN=9; // define the pin of LED as pin 9 int a=0; IRrecv irrecv(RECV_PIN); decode_results results; void setup() {Serial.begin(9600); irrecv.enableIRIn(); // Initialize the IR receiver pinMode(LED_PIN,OUTPUT); //set pin 3 of LED to OUTPUT } void loop() { if (irrecv.decode(&results)) { if(results.value==0xFF02FD &a==0) //according to the above key value, press“OK”on remote control , LED will be controlled {digitalWrite(LED_PIN,HIGH); //LED will be on a=1; } else if(results.value==0xFF02FD &a==1) //press again { digitalWrite(LED_PIN,LOW); //LED will go off a=0; } irrecv.resume(); // receive the next value } }
Upload code to development board, press“OK”key on remote control to make LED on and off.
Project 12: IR Remote Control Robot

1. Description
We combine the hardware knowledge – sensors, motor drive, and IR receiver, to build an infrared remote control robot car! In the IR receiver section, we’ve listed out each key value of remote control. In this circuit design, we can set the key value in the code to navigate the robot car movement. The corresponding state pattern is displayed on the 8*16 LED matrix.
The specific logic of infrared remote control robot car is shown below:

Based on the circuit design, we can start building our own remote control robot.

2. Hook-up Diagram

3. Test Code
/* keyestudio 4wd BT Car V2.0 lesson 12 remote control robot http://www.keyestudio.com */ //Array, used to store the data of pattern, can be calculated by yourself or obtained from the modulus tool unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01}; unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char back[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00}; unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00}; unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}; #define SCL_Pin A5 //Set clock pin to A5 #define SDA_Pin A4 //Set data pin to A4 #define ML_Ctrl 4 //define direction control pin of B motor #define ML_PWM 5 //define PWM control pin of B motor #define MR_Ctrl 2 //define direction control pin of A motor #define MR_PWM 6 //define PWM control pin of A motor #include <IRremote.h>//function library of IR remote control int RECV_PIN =3;// set the pin of IR receiver to 3 IRrecv irrecv(RECV_PIN); long irr_val; decode_results results; void setup() { pinMode(ML_Ctrl, OUTPUT);//define direction control pin of B motor to OUTPUT pinMode(ML_PWM, OUTPUT);//define PWM control pin of B motor to OUTPUT pinMode(MR_Ctrl, OUTPUT);//define direction control pin of A motor to OUTPUT pinMode(MR_PWM, OUTPUT);//define PWM control pin of A motor to OUTPUT Serial.begin(9600);//Start serial printing, baud rate is 9600 // In case the interrupt driver crashes on setup, give a clue // to the user what's going on. irrecv.enableIRIn(); // Start the receiver Serial.println("Enabled IRin"); //Set pin to output pinMode(SCL_Pin,OUTPUT); pinMode(SDA_Pin,OUTPUT); //Clear the matrix display matrix_display(clear); matrix_display(start01); } void loop() { if (irrecv.decode(&results)) { irr_val = results.value; Serial.println(irr_val, HEX);//serial reads the IR remote signals switch(irr_val) { case 0xFF629D : car_front(); matrix_display(front); break; case 0xFFA857 : car_back(); matrix_display(back); break; case 0xFF22DD : car_left(); matrix_display(left); break; case 0xFFC23D : car_right(); matrix_display(right); break; case 0xFF02FD : car_Stop(); matrix_display(STOP01); break; } irrecv.resume(); // Receive the next value } } void car_front()//car goes forward { digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH level analogWrite(ML_PWM,200);//Set PWM control speed of B motor to 20 digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH level analogWrite(MR_PWM,200);//Set PWM control speed of A motor to 20 } void car_back()//car goes back { digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void car_left()//car turns left { digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH level analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void car_right()//car turns right { digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH level analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void car_Stop()//car stops { analogWrite(ML_PWM,0);//set PWM control speed of B motor to 0 analogWrite(MR_PWM,0);//set PWM control speed of A motor to 0 } //this function is used for dot matrix display void matrix_display(unsigned char matrix_value[]) { IIC_start(); //the function to call the data transmission IIC_send(0xc0); //Select address for(int i = 0;i < 16;i++) //Pattern data has 16 bytes { IIC_send(matrix_value[i]); //data to convey patterns } IIC_end(); //end the transmission of patterns data IIC_start(); IIC_send(0x8A); //display control, set pulse width to 4/16 IIC_end(); } // the condition that data transmission starts void IIC_start() { digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); } // transmit data void IIC_send(unsigned char send_data) { for(char i = 0;i < 8;i++) //Every character has 8 bits { digitalWrite(SCL_Pin,LOW); //pull down the SCL_Pin to change the signal of SDA delayMicroseconds(3); if(send_data & 0x01) //1 or 0 of byte is used to set high and low level of SDA_Pin { digitalWrite(SDA_Pin,HIGH); } else { digitalWrite(SDA_Pin,LOW); } delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); //Pull up SCL_Pin to stop data transmission delayMicroseconds(3); send_data = send_data >> 1; //Detect bit by bit, so move the data right by one bit } } //the sign that data transmission ends void IIC_end() { digitalWrite(SCL_Pin,LOW); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); }
4. Test Result
Upload the code successfully on the keyestudio V4.0 board and then wire according to the connection diagram. After DIP switch is dialed to the right end, we can use the infrared remote control to control the movement of the smart car . At the same time, the 8X16 LED light board displays the corresponding state pattern.
Project 13: Bluetooth
1. Description
Bluetooth, a simple wireless communication module, has went viral since the last few decades and been used in most of the battery-powered devices for its easy-to-use function.

Over the past years, there have been many upgrades of Bluetooth standard to fulfil the demands of customers and the development of technology as well as to follow the trend of time.
Over the few years, there are many things changed including data transmission rate, power consumption with wearable and IoT Devices and Security System.
Here are we going to learn about HM-10 BLE 4.0 with Arduino Board? The HM-10 is a readily available Bluetooth 4.0 module. This module is used for establishing wireless data communication. The module is designed by using the Texas Instruments CC2540 or CC2541 Bluetooth low energy (BLE) System on Chip (SoC).
2. Specification
Bluetooth protocol: Bluetooth Specification V4.0 BLE
No byte limit in serial port Transceiving
In open environment, realize 100m ultra-distance communication with iphone4s
Working frequency: 2.4GHz ISM band
Modulation method: GFSK(Gaussian Frequency Shift Keying)
Transmission power: -23dbm, -6dbm, 0dbm, 6dbm, can be modified by AT command.
Sensitivity: ≤-84dBm at 0.1% BER
Transmission rate: Asynchronous: 6K bytes ; Synchronous: 6k Bytes
Security feature: Authentication and encryption
Supporting service: Central & Peripheral UUID FFE0, FFE1
Power consumption: Auto sleep mode, stand by current 400uA~800uA, 8.5mA during transmission.
Power supply: 5V DC
Working temperature: –5 to +65 Centigrade
3. What You Need

4. Connection Diagram
STATE: state test pins, connected to internal LED, generally keep it unconnected.
RXD: serial interface, receiving terminal.
TXD: serial interface, transmitting terminal.
GND: Ground.
VCC: positive pole of the power source.
EN/BRK: break connect, it means breaking the Bluetooth connection, generally, keep it unconnected.

Pay attention to the pin direction when inserting Bluetooth module, and don’t insert it before uploading test code.
5. Test Code
/* keyestudio 4wd BT Car V2.0 lesson 13.1 bluetooth http://www.keyestudio.com */ char ble_val; //character variable, used to save the value received by Bluetooth void setup() { Serial.begin(9600); } void loop() { if(Serial.available() > 0) //make sure if there is data in serial buffer { ble_val = Serial.read(); //Read data from serial buffer Serial.println(ble_val); //Print } }
(There will be contradiction between serial communication of code and communication of Bluetooth when uploading code. Therefore, don’t link Bluetooth module before uploading code.)
After uploading code on development board, then insert Bluetooth module and wait for the command from your cellphone.
6. Download APP
The code is for reading the received signal, and we also need a device to send signals. In this project, we send signals to control robot car via a cellphone. Therefore, we need to download the APP.
7. For iOS system
Note: Allow APP to access“location”in settings of your cellphone when connecting to Bluetooth module; otherwise, Bluetooth may not be connected.
Enter APP STORE to search BLE Scanner 4.0, then download it.

8. For Android system
Enter Google Play to find out BLE Scanner, then download.
And allow APP to access“location”, you could enable“location”in settings of your cellphone.

-
After installation, open App and enable“Location and Bluetooth” permission.
-
Open App, the name of Bluetooth module is HMSoft.
Then click “connect” to link it with Bluetooth

After connecting to HMSoft, click it to get multiple options, such as device information, access permission, general and custom service. Choose “CUSTOM SERVICE”

Then the following page pops up.

Click(Read,Notify,WriteWithoutResponse)to enter the following page

Click Write Value to enter HEX or Text.

Open the serial monitor on Arduino,enter a 0 or other characters on Text interface.

Then click“Write”, open serial monitor to view if there is a“0”signal

9. Code Explanation
Serial.available() : The current rest characters when return to buffer area. Generally, this function is used to judge if there is data in buffer. When Serial.available()>0, it means that receives the data and can be read.
xxSerial.read():xxRead a data of a Byte in buffer of serial port, for instance, device sends data to Arduino via serial port, then we could read data by “Serial.read()”.
10. Extension Practice
We could send a command via Bluetooth to turn a LED on and off.
D3 is connected to a LED, as shown below:

/* keyestudio 4wd BT Car V2.0 lesson 13.2 Bluetooth http://www.keyestudio.com */ int ledpin=9; void setup() { Serial.begin(9600); pinMode(ledpin,OUTPUT); } void loop() { int i; if (Serial.available()) { i=Serial.read(); Serial.println("DATA RECEIVED:"); if(i=='1') { digitalWrite(ledpin,1); Serial.println("led on"); } if(i=='0') { digitalWrite(ledpin,0); Serial.println("led off"); } } }

Click“Write”on APP, when you enter 1, LED will be on;when you input 0, it will be off. (Remember to remove the Bluetooth module after finishing experiment. Otherwise, burning code will be affected)
Project 14: Bluetooth Control Robot

1. Description
We’ve learned the basic knowledge of Bluetooth. And in this lesson, we will make a Bluetooth remote smart car. In this experiment, we default the HM-10 Bluetooth module as a Slave and the cellphone as a Host.
keyes BT car is an APP rolled out by keyestudio team. You can control the robot car by it readily.
2. Test APP
Special note: before uploading the test code, you need to remove the Bluetooth module. Otherwise, the test code will fail to upload. You can reconnect the Bluetooth module when the code is uploaded successfully.
/* keyestudio 4WD BT Car V2.0 lesson 14.1 Bluetooth test <http://www.keyestudio.com> */ char BLE_val; void setup() { Serial.begin(9600); } void loop() { if(Serial.available()>0) { BLE_val = Serial.read(); Serial.println(BLE_val); } }
Upload test code on V4.0 development board and insert the Bluetooth module. Then we need to download the APP.
Download the app and connect Bluetooth
iOS System
-
Open the App Store, search for and download Keyes BT Car.

2.After installation is complete, an application icon will appear on the desktop.
3. Turn on your phone’s Bluetooth and location services, and allow Keyes BT Car to access Bluetooth.

4. Open the Keyes BT car app, tap the Bluetooth button in the top right corner to scan for devices, find the Bluetooth name, and connect.

5.After the Bluetooth connection is complete, select “4WD Robot”.。
6. If the LED on the Bluetooth module stops flashing and stays lit, it means the connection is successful. The image below shows the interface of the app.

Android System
-
Search for “Keyes 4wd car” on Google Play or download it via the provided link.

2. Turn on your phone’s Bluetooth and location services, and enable location and nearby device permissions for the app in the settings.

3. Open the Keyes BT Car app and tap the connect button in the top right corner.

4.Find the Bluetooth name and connect.

5. The LED on the Bluetooth module stops flashing and stays solid, indicating a successful connection.
3. Flow Chart

4. Hook-up Diagram

5. Test Code
/* keyestudio 4wd BT Car V2.0 lesson 14.2 Bluetooth Remote Control http://www.keyestudio.com */ //Array, used to store the data of pattern, can be calculated by yourself or obtained from the modulus tool unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01}; unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char back[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00}; unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00}; unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}; #define SCL_Pin A5 //Set clock pin to A5 #define SDA_Pin A4 //Set data pin to A4 unsigned char data_line = 0; unsigned char delay_count = 0; #define ML_Ctrl 4 //define direction control pin of B motor #define ML_PWM 5 //define PWM control pin of B motor #define MR_Ctrl 2 //define direction control pin of A motor #define MR_PWM 6 //define PWM control pin of A motor char BLE_val; void setup() { Serial.begin(9600); pinMode(ML_Ctrl, OUTPUT);//set direction control pin of B motor to OUTPUT pinMode(ML_PWM, OUTPUT);//set PWM control pin of B motor to OUTPUT pinMode(MR_Ctrl, OUTPUT);//set direction control pin of A motor to OUTPUT pinMode(MR_PWM, OUTPUT);//Set PWM control pin of A motor to OUTPUT //Set pin to output pinMode(SCL_Pin,OUTPUT); pinMode(SDA_Pin,OUTPUT); //Clear the matrix display matrix_display(clear); matrix_display(start01); } void loop() { if(Serial.available()>0) { BLE_val = Serial.read(); Serial.println(BLE_val); } switch(BLE_val) { case 'F': car_front(); matrix_display(front); break; case 'B': car_back(); matrix_display(back); break; case 'L': car_left(); matrix_display(left); break; case 'R': car_right(); matrix_display(right); break; case 'S': car_Stop();matrix_display(STOP01); break; } } void car_front() { digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void car_back() { digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void car_left() { digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void car_right() { digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200 digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200 } void car_Stop() { analogWrite(ML_PWM,0);//set PWM control speed of B motor to 0 analogWrite(MR_PWM,0);//set PWM control speed of A motor to 0 } //this function is used for dot matrix display void matrix_display(unsigned char matrix_value[]) { IIC_start(); //the function that calls the data transmission IIC_send(0xc0); //Select address for(int i = 0;i < 16;i++) //Pattern data has 16 bytes { IIC_send(matrix_value[i]); //data to convey patterns } IIC_end(); //end the transmission of patterns data IIC_start(); IIC_send(0x8A); //display control, set pulse width to 4/16 IIC_end(); IIC_end(); } // the condition of data transmission starts void IIC_start() { digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); } // transmit data void IIC_send(unsigned char send_data) { for(char i = 0;i < 8;i++) //Every character has 8 bits { digitalWrite(SCL_Pin,LOW); //pull down the SCL_Pin to change the signal of SDA delayMicroseconds(3); if(send_data & 0x01) //1 or 0 of byte is used to set high and low level of SDA_Pin { digitalWrite(SDA_Pin,HIGH); } else { digitalWrite(SDA_Pin,LOW); } delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); //Pull up SCL_Pin to stop data transmission delayMicroseconds(3); send_data = send_data >> 1; //Detect bit by bit, so move the data right by one bit } } //the sign that data transmission ends void IIC_end() { digitalWrite(SCL_Pin,LOW); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); }
6. Test Result
Upload the code on the V4.0 board. After uploading code on development board, then insert Bluetooth module and wait for the command from your cellphone.
After power-on, the DIP switch will be dialed to the“ON”end. And after connecting Bluetooth successfully, we can use the APP to control the smart car to move.
Project 15: Multi-purpose Bluetooth Robot

Description
In previous projects, the robot car only performs a single function. However, in this lesson, we will integrate all of its functions via Bluetooth control.
Here is a simple flow chart of multi-purpose robot car for your reference.

Connection Diagram

Test Code
/* keyestudio 4wd BT Car V2.0 lesson 15 Multifunctional Robot car http://www.keyestudio.com */ unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01}; unsigned char front_matrix[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char back_matrix[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char left_matrix[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00}; unsigned char right_matrix[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00}; unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00}; unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}; #define SCL_Pin A5 #define SDA_Pin A4 #include "SR04.h" #define TRIG_PIN 12 #define ECHO_PIN 13 SR04 sr04 = SR04(ECHO_PIN,TRIG_PIN); long distance,distance1,distance2,distance3; const int left_ctrl = 4; const int left_pwm = 5; const int right_ctrl = 2; const int right_pwm = 6; const int sensor_l = 11; const int sensor_c = 7; const int sensor_r = 8; int l_val,c_val,r_val; const int servopin = 10; char BLE_val; void setup() { Serial.begin(9600); //irrecv.enableIRIn(); // Start the receiver servopulse(servopin,90); pinMode(left_ctrl,OUTPUT); pinMode(left_pwm,OUTPUT); pinMode(right_ctrl,OUTPUT); pinMode(right_pwm,OUTPUT); pinMode(sensor_l,INPUT); pinMode(sensor_c,INPUT); pinMode(sensor_r,INPUT); pinMode(SCL_Pin,OUTPUT); pinMode(SDA_Pin,OUTPUT); //Clear the screen matrix_display(clear); matrix_display(start01); } void loop() { if(Serial.available()>0) { BLE_val = Serial.read(); Serial.println(BLE_val); } switch(BLE_val) { case 'F': front(); matrix_display(front_matrix); break; case 'B': back(); matrix_display(back_matrix); break; case 'L': left(); matrix_display(left_matrix); break; case 'R': right(); matrix_display(right_matrix); break; case 'S': Stop(); matrix_display(STOP01); break; case 'X': tracking(); break; case 'Y': avoid();break; case 'U': follow_car();break; } } void avoid() { matrix_display(start01); int track_flag = 0; while(track_flag == 0) { distance1=sr04.Distance(); if((distance1 < 20)&&(distance1 != 0)) { Stop2(); delay(100); servopulse(servopin,180); delay(500); distance2=sr04.Distance(); delay(100); servopulse(servopin,0); delay(500); distance3=sr04.Distance(); delay(100); if(distance2 > distance3) { left(); servopulse(servopin,90); } else { right(); servopulse(servopin,90); } } else { front(); } if(Serial.available()>0) { BLE_val = Serial.read(); if(BLE_val == 'S') { track_flag = 1; } } } } void follow_car() { matrix_display(start01); servopulse(servopin,90); int track_flag = 0; while(track_flag == 0) { distance = sr04.Distance(); if(distance<8) { back2(); } else if((distance>=8)&&(distance<13)) { Stop(); } else if((distance>=13)&&(distance<35)) { front(); } else { Stop(); } if(Serial.available()>0) { BLE_val = Serial.read(); if(BLE_val == 'S') { track_flag = 1; } } } } void servopulse(int servopin,int myangle) { for(int i=0;i<30;i++){ int pulsewidth = (myangle*11)+500; digitalWrite(servopin,HIGH); delayMicroseconds(pulsewidth); digitalWrite(servopin,LOW); delay(20-pulsewidth/1000); } } void tracking() { matrix_display(start01); int track_flag = 0; while(track_flag == 0) { l_val = digitalRead(sensor_l); c_val = digitalRead(sensor_c); r_val = digitalRead(sensor_r); if(c_val == 1) { front2(); } else { if((l_val == 1)&&(r_val == 0)) { left(); } else if((l_val == 0)&&(r_val == 1)) { right(); } else { Stop(); } } if(Serial.available()>0) { BLE_val = Serial.read(); if(BLE_val == 'S') { track_flag = 1; } } } } void front() { digitalWrite(left_ctrl,HIGH); analogWrite(left_pwm,220); digitalWrite(right_ctrl,HIGH); analogWrite(right_pwm,190); } void front2() { digitalWrite(left_ctrl,HIGH); analogWrite(left_pwm,75); digitalWrite(right_ctrl,HIGH); analogWrite(right_pwm,70); } void back() { digitalWrite(left_ctrl,LOW); analogWrite(left_pwm,220); digitalWrite(right_ctrl,LOW); analogWrite(right_pwm,190); } void back2() { digitalWrite(left_ctrl,LOW); analogWrite(left_pwm,110); digitalWrite(right_ctrl,LOW); analogWrite(right_pwm,90); } void left() { digitalWrite(left_ctrl,LOW); analogWrite(left_pwm,220); digitalWrite(right_ctrl,HIGH); analogWrite(right_pwm,190); } void right() { digitalWrite(left_ctrl,HIGH); analogWrite(left_pwm,220); digitalWrite(right_ctrl,LOW); analogWrite(right_pwm,190); } void Stop() { analogWrite(left_pwm,0); analogWrite(right_pwm,0); } void Stop2() { digitalWrite(left_ctrl,LOW); analogWrite(left_pwm,200); digitalWrite(right_ctrl,LOW); analogWrite(right_pwm,200); delay(50); analogWrite(left_pwm,0); analogWrite(right_pwm,0); } //this function is used for dot matrix display void matrix_display(unsigned char matrix_value[]) { IIC_start(); // the function to transmit data IIC_send(0xc0); //select address for(int i = 0;i < 16;i++) //pattern data has 16 bytes { IIC_send(matrix_value[i]); //data transmits patterns } IIC_end(); //end the transmission of patterns data IIC_start(); IIC_send(0x8A); //display the control, set pulse width to 4/16 IIC_end(); } // The condition of data transmission starts void IIC_start() { digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); } // transmit data void IIC_send(unsigned char send_data) { for(char i = 0;i < 8;i++) //Every character has 8 bits { digitalWrite(SCL_Pin,LOW); //pull down the SCL_Pin to change the signal of SDA delayMicroseconds(3); if(send_data & 0x01) // 1 or 0 of byte is used to set high and low level of SDA_Pin { digitalWrite(SDA_Pin,HIGH); } else { digitalWrite(SDA_Pin,LOW); } delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); //pull up the SCL_Pin to stop transmitting data delayMicroseconds(3); send_data = send_data >> 1; //Detect bit by bit, so move the data right by one bit detect bit by bit, move data } } //the sign that data ends transmitting void IIC_end() { digitalWrite(SCL_Pin,LOW); delayMicroseconds(3); digitalWrite(SDA_Pin,LOW); delayMicroseconds(3); digitalWrite(SCL_Pin,HIGH); delayMicroseconds(3); digitalWrite(SDA_Pin,HIGH); delayMicroseconds(3); }
Test Result
Special note: before uploading the test code, you need to remove the Bluetooth module. Otherwise, the test code will fail to upload. You can reconnect the Bluetooth module when the code is uploaded successfully
Uploading code to development board, plugging in and turning on it , the 4WD robot can not only go forward and back but turn left and right. Moreover, it is known that the mobile APP, connected to Bluetooth successfully, can be used to control the movement of the robot.
9. Common Troubleshooting
1. Robot Car Unresponsive
A: 1. Please use battery power and check whether it is sufficient, and turn the switch of the motor driver board to ON.
2. Please check whether the wiring is correct.
Note: Before the control board leaves the factory, there is no program related to robot car. You need to upload corresponding programs to realize the function.
2 .Computer Does Not Recognize USB Port
A: 1. Please make sure you have installed the development board driver referring to: 6. Install Arduino IDE and Driver

-
Please check whether USB cable is in good condition.
3. Program Compilation Error
A: Has the library file been added? For how to add, please refer to: 7. How to Add Libraries?

If you have Arduino IDE 2.0, please refer to the following methods to add library files:
Click Sketch—->Include Library—>Add.ZIP Library,then Then navigate to the library file you downloaded and click “open.”(File compressed to ZIP format)

4 .Program Fails to Upload
A: 1. Unplug the Bluetooth module before uploading the program, otherwise it cannot be uploaded. Please just plug the Bluetooth in after the upload is complete;
2. Please select the correct development board and port:. You may check the port corresponding to the development board on the device manager of your computer.
5. Servo is Hot or Shaking Violently
A: Do please reset the steering gear to 90 degrees before installing, avoiding servo being blocked and burnt when the it executes the routine program. For specific operations, please refer to Servo Installation in the installation steps.
6 .APP Disabled or Unresponsive Connection to Bluetooth
A: 1. Please open your the positioning if your phone is Android system.
2. APP does not respond when controlling robot car: make sure that the functional program controlled by APP has been uploaded. Separate courses for each sensor are provided in the course. So when you find that one sensor does not respond, you may refer to the course to have a check and test. For example, when using APP to control the robot car without response, please refer to Project 14: Bluetooth Control Robot to test the Bluetooth module to see if the Bluetooth module receives data normally.
7. One-side Wheel of Mini Car Is Moving After Uploading Motor Test Program
A: 1. Please check the model of the driver board of the motor. This will happen if you download and use a wrong file. You may upload Lesson 5 Program to test whether the motor is in good condition.

2. Please check whether jumper caps of the motor drive board are inserted backwards. Please correct them if so.

8. Dot matrix Is Unable to bright
A: Please check whether the wiring is correct, referring to Lesson 4 Test Program

10. Resources
Wiki page: https://docs.keyestudio.com/projects/KS0470/en/latest/,
Official website: https://keyestudio.com/,
Assembly Video Link: https://www.youtube.com/watch?v=zEuQCwIVQIs,
Download the APP, Code and library : https://fs.keyestudio.com/KS0470
11.Contact Us
We sincerely thank those who have purchased our products and our loyal users who continue to follow and support us. It is your companionship and feedback that drive us to keep improving.
Your valuable suggestions and user experiences play a crucial role in helping us deliver high-quality products, enabling us to make ongoing improvements to meet the practical needs of more users.
If you encounter any issues while using our products or have any suggestions for improvement, please don’t hesitate to contact us at Amazon: service@keyestudio.com
AliExpress: tivon@keyestudio.com
Other Channels: sunny@keyestudio.com
Every piece of feedback from you is the foundation of our growth.We promise to repay your trust with even better products!
Этот урок показывает как сделать радиоуправляемую модель машины, которую можно контролировать через смартфон. В этом руководстве мы будем использовать плату Arduino Uno.

Шаг 1. Комплектующие
Для того, чтобы сделать модель машины на радиоуправлении (RC-машина) с использованием Ардуино и с возможностью контроля через смартфон, нам понадобятся следующие детали:
- Комплект шасси робота 4WD
- Arduino Uno
- Модуль H-моста LM298
- Модуль Bluetooth HC-05
- Батарея Li-po 12В
- Провода-перемычки
- Провода «папа-папа»
- Клейкая лента или любая другая лента
- Смартфон
Шаг 2. Шасси


Вы можете купить готовый комплект для сборки 4WD шасси или сделать его с помощью ПВХ или любого вида жесткой доски. Наш вариант на фото выше был куплен в онлайн-магазине. Вполне возможно сделать аналог этого шасси своими руками. Не имеет особого значения вид шасси, можно выбрать на свой вкус.
Шаг 3. Моторы (приводы)

В этом проекте используются 6В моторы постоянного тока. Вы можете использовать любой вид приводов на 6В постоянного тока. После того как вы купили моторы, нужно их подготовить перед размещением на шасси.

Отрежьте 4 кусочка красного и черного провода длиной примерно от 5 до 6 дюймов (12 — 15 см). Можно использовать провода 0,5 мм. Снимите изоляцию с проводов на каждом конце. Припаяйте провода к клеммам двигателей.

Вы можете проверить полярность двигателя, подключив его к батарейному блоку. Если он вращается в прямом направлении (красный провод с положительного и черный провод с отрицательного вывода батареи), то соединение правильное.

Шаг 4. Установка двигателей




Следуйте фотографиям выше для того, чтобы понять как установить все двигатели на шасси нашей будущей модели радиоуправляемой машины, которую мы будем контролировать со смартфона.
Шаг 5. Ардуино контроллер
Arduino UNO — это плата микроконтроллера с открытым исходным кодом, основой которой служит микроконтроллер Microchip ATmega328P и разработанная Arduino.cc.
Плата оснащена наборами цифровых и аналоговых пинов ввода/вывода (I/O), которые могут быть подключены к различным платам расширения (экранам) и другим цепям. Плата имеет 14 цифровых контактов, 6 аналоговых контактов и программируется с помощью Arduino IDE (интегрированная среда разработки) через USB-кабель типа B. Плата может питаться от USB-кабеля или от внешней 9-вольтовой батареи, хотя он принимает напряжение от 7 до 20 вольт, по аналогии с Arduino Nano и Leonardo.

Эталонный дизайн оборудования распространяется под лицензией Creative Commons Attribution Share-Alike 2.5 и доступен на веб-сайте Arduino. Макет и производственные файлы для некоторых версий оборудования также доступны. «Uno» означает один на итальянском языке и был выбран в честь выпуска Arduino Software (IDE) 1.0. Плата Uno и версия 1.0 программного обеспечения Arduino (IDE) были эталонными версиями Arduino, теперь разработанными для более новых выпусков.
Плата Uno является первой в серии плат Arduino c USB и эталонной моделью для последующих платформ. ATmega328 на Arduino Uno поставляется с предварительно запрограммированным загрузчиком, который позволяет загружать новый код без использования внешнего аппаратного программера с использованием оригинального протокола STK500. Uno также отличается от всех предыдущих плат тем, что не использует микросхему драйвера FTDI USB-to-serial. Вместо этого он использует Atmega16U2 (Atmega8U2 до версии R2), запрограммированный как преобразователь USB-to-serial.
Микроконтроллеры обычно программируются с использованием диалекта функций из языков программирования C и C++. В дополнение к использованию традиционных наборов инструментов компилятора проект Arduino предоставляет интегрированную среду разработки (IDE).
Шаг 6. H-мост (модуль LM 298)

Термин H-мост (англ. H-bridge) выведен из типичного графического представления такой схемы. Это схема, которая может приводить двигатель постоянного тока в прямом и обратном направлении, см. рисунок выше для понимания работы H-моста.
Он состоит из 4 электронных переключателей S1, S2, S3 и S4 (транзисторы / МОП-транзисторы (MOSFET) / IGBTS). Когда переключатели S1 и S4 замкнуты (а S2 и S3 разомкнуты), на двигатель идет положительное напряжение. Поэтому он вращается в прямом направлении. Аналогично, когда S2 и S3 замкнуты, а S1 и S4 открыты, обратное напряжение идет через двигатель, поэтому он вращается в обратном направлении.
Примечание. Переключатели в одном и том же плече (S1, S2 или S3, S4) никогда не замыкаются в одно и то же время, это приведет к короткому замыканию.
H-мосты доступны в виде интегральных микросхем, или вы можете создать свой собственный, используя 4 обычных транзистора или полевых транзистора (MOSFET). В нашем случае мы используем микросхему H-моста LM298, которая позволяет контролировать скорость и направление вращения двигателей. Ниже перейдем к описанию пинов:
Выход 1: двигатель постоянного тока 1 «+» или шаговый двигатель A+
Выход 2: двигатель постоянного тока 1 «-» или шаговый двигатель A-
Выход 3: двигатель постоянного тока 2 «+» или шаговый двигатель B+
Выход 4: двигатель B выведен
12В контакт: 12В вход, но вы можете использовать от 7 до 35 В
GND: земля
Вывод 5В: выход 5 В, если перемычка 12 В на месте, идеально подходит для питания вашего Arduino
EnA: включает сигнал ШИМ для двигателя А
IN1: включить двигатель A
IN2: включить двигатель A
IN3: включить двигатель B
IN4: включить двигатель B
EnB: включает сигнал ШИМ для двигателя B
Шаг 7. Источник питания

Для нашей радиоуправляемой модели машины на основе Ардуино и с контролем через смартфон могут быть использованы следующие батареи:
- Щелочная батарея типа АА (не перезаряжаемая)
- AA NiMh или NiCd аккумулятор
- Литий-ионный аккумулятор
- Батарея LiPo
Шаг 8. Электрические соединения
Для реализации соединений нужны перемычки. Соедините красные провода двух двигателей (с каждой стороны) вместе и черные провода вместе. Таким образом у нас теперь есть два терминала с каждой стороны. MOTORA отвечает за два правых двигателя, соответственно два левых двигателя подключены к MOTORB. Следуйте инструкциям ниже, чтобы соединить все.
Соединения двигателей
Out1 -> Красный провод левого бокового мотора (+)
Out2 -> Черный провод левого двигателя (-)
Out3 -> Красный провод правой стороны двигателя (+)
Out4 -> Черный провод правой стороны двигателя (-)
LM298 -> Arduino
IN1 -> D5
IN2-> D6
IN2 -> D9
IN2-> D10
Модуль Bluetooth -> Arduino
Rx-> Tx
Tx -> Rx
GND -> GND
Vcc -> 3,3 В
Питание
12V -> Подключите красный провод аккумулятора
GND -> Подключите черный провод аккумулятора и вывод Arduino GND
5V -> Подключение к контакту Arduino 5V
Шаг 9. Логика управления
Логика управления описывается в таблице ниже.

Шаг 10. Приложение для смартфона


Скачать приложение и установить в смартфон вы можете через Google Play (ссылка).
Для управления RC-автомобилем мы используем смартфон. Смартфон подключается к контроллеру через модуль Bluetooth (HC-06/05). После установки приложения необходимо настроить связь с модулем Bluetooth. Пароль для связи: «1234».
Шаг 11. Код Ардуино
Программная часть довольно простая и не нужна никакая библиотека. Если вы понимаете логическую таблицу на предыдущих шагах, вы сможете написать собственный код. Скачать или скопировать код вы можете ниже:
// Код ошибки: код 01; Радиус поворота выше скорости; Код 02; Скорость выше 255;
#define in1 5 //L298n Motor Driver pins.
#define in2 6
#define in3 10
#define in4 11
#define LED 13
int command; //Int to store app command state.
int Speed = 204; // 0 - 255.
int Speedsec;
int buttonState = 0;
int lastButtonState = 0;
int Turnradius = 0; //Set the radius of a turn, 0 - 255 Note:the robot will malfunction if this is higher than int Speed.
int brakeTime = 45;
int brkonoff = 1; //1 for the electronic braking system, 0 for normal.
void setup() {
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
pinMode(LED, OUTPUT); //Set the LED pin.
Serial.begin(9600); //Set the baud rate to your Bluetooth module.
}
void loop() {
if (Serial.available() > 0) {
command = Serial.read();
Stop(); //Initialize with motors stoped.
switch (command) {
case 'F':
forward();
break;
case 'B':
back();
break;
case 'L':
left();
break;
case 'R':
right();
break;
case 'G':
forwardleft();
break;
case 'I':
forwardright();
break;
case 'H':
backleft();
break;
case 'J':
backright();
break;
case '0':
Speed = 100;
break;
case '1':
Speed = 140;
break;
case '2':
Speed = 153;
break;
case '3':
Speed = 165;
break;
case '4':
Speed = 178;
break;
case '5':
Speed = 191;
break;
case '6':
Speed = 204;
break;
case '7':
Speed = 216;
break;
case '8':
Speed = 229;
break;
case '9':
Speed = 242;
break;
case 'q':
Speed = 255;
break;
}
Speedsec = Turnradius;
if (brkonoff == 1) {
brakeOn();
} else {
brakeOff();
}
}
}
void forward() {
analogWrite(in1, Speed);
analogWrite(in3, Speed);
}
void back() {
analogWrite(in2, Speed);
analogWrite(in4, Speed);
}
void left() {
analogWrite(in3, Speed);
analogWrite(in2, Speed);
}
void right() {
analogWrite(in4, Speed);
analogWrite(in1, Speed);
}
void forwardleft() {
analogWrite(in1, Speedsec);
analogWrite(in3, Speed);
}
void forwardright() {
analogWrite(in1, Speed);
analogWrite(in3, Speedsec);
}
void backright() {
analogWrite(in2, Speed);
analogWrite(in4, Speedsec);
}
void backleft() {
analogWrite(in2, Speedsec);
analogWrite(in4, Speed);
}
void Stop() {
analogWrite(in1, 0);
analogWrite(in2, 0);
analogWrite(in3, 0);
analogWrite(in4, 0);
}
void brakeOn() {
//Here's the future use: an electronic braking system!
// read the pushbutton input pin:
buttonState = command;
// compare the buttonState to its previous state
if (buttonState != lastButtonState) {
// if the state has changed, increment the counter
if (lastButtonState == 'F') {
if (buttonState == 'S') {
back();
delay(brakeTime);
Stop();
}
}
if (lastButtonState == 'B') {
if (buttonState == 'S') {
forward();
delay(brakeTime);
Stop();
}
}
if (lastButtonState == 'L') {
if (buttonState == 'S') {
right();
delay(brakeTime);
Stop();
}
}
if (lastButtonState == 'R') {
if (buttonState == 'S') {
left();
delay(brakeTime);
Stop();
}
}
}
// save the current state as the last state,
//for next time through the loop
lastButtonState = buttonState;
}
void brakeOff() {
}
На этом всё. Хороших вам проектов.
13 февраля 2019 в 17:30
| Обновлено 7 декабря 2019 в 00:04 (редакция)
Опубликовано:
Уроки, Arduino, Моторы
Arduino Uno tutorials
🕑 This lesson will take about 45 minutes
In this lesson, you will learn to make a 4WD car with obstacle avoidance. This project involves building a 4WD car with an Arduino and ultrasonic sensor that can detect nearby objects and change its direction to avoid these objects. You can also extend this project with a servo motor that sweeps the ultrasonic sensor left and right for greater “vision” of obstacles surrounding the car.
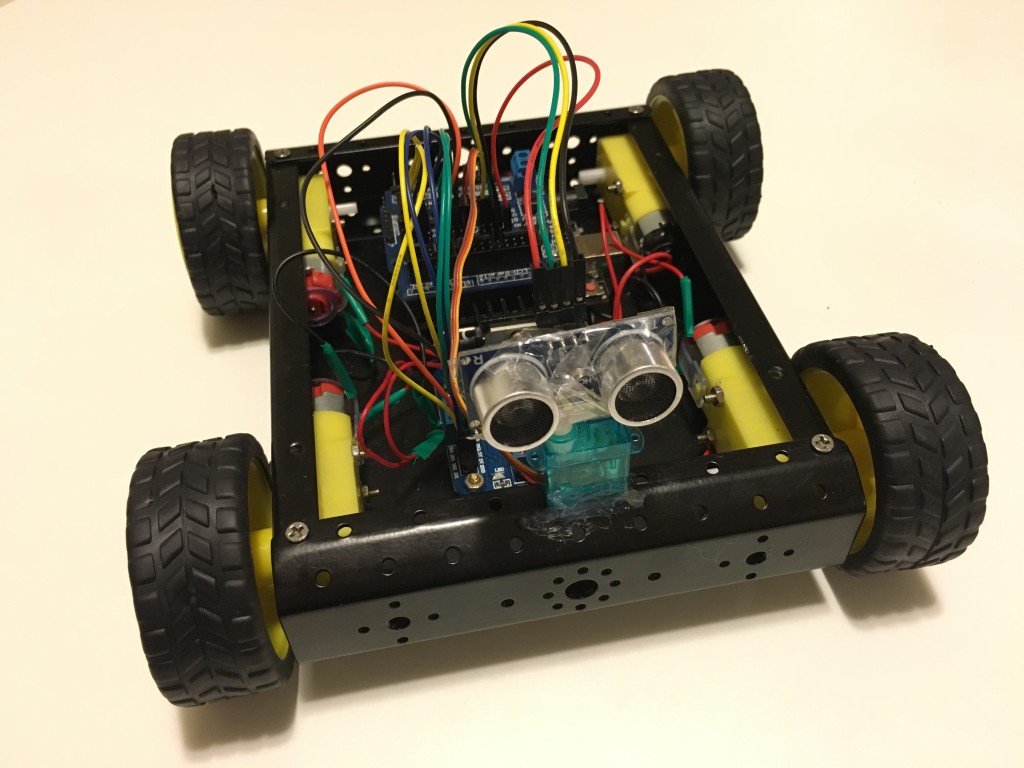
You can extend this project by adding more sensors such as ultrasonic sensor to the rear so that the car doesn’t reverse into objects, speed detection sensors to measure speed, line following sensors, and LED brake lights and headlights. You could even add light sensors and LEDs to turn headlights on in low-light conditions or a Bluetooth module to control the car remotely using a smartphone app.
Parts required
Here is what you will need:
-
1 x Arduino Uno board
-
1 x 4WD Robotic Car kit (4 wheels, 4 DC motors, chassis, AA battery holder, screws)
-
6 x AA batteries
-
1 x 9V battery
-
1 x 9V battery power cable barrel jack connector
-
1 x L298N Motor Module
-
1 x Arduino Sensor Shield v5.0
-
1 x HC-SR04 Ultrasonic Sensor
-
Wires:
-
4 x female-to-female jumper wires for Ultrasonic Sensor
-
8 x female-to-female jumper wires for the Motor Module to Sensor Shield
-
8 x bare-ended wires to go from the four motors to the Motor Module
-
2 x bare-ended wires to go from the Motor Module to Sensor Shield
-
-
Arduino IDE software (free download at http://www.arduino.cc)
-
1x USB cable (A male plug to B male plug)
Below are images of the main components you need (apart from the wiring and batteries) – the different car parts, shields, modules and sensors.
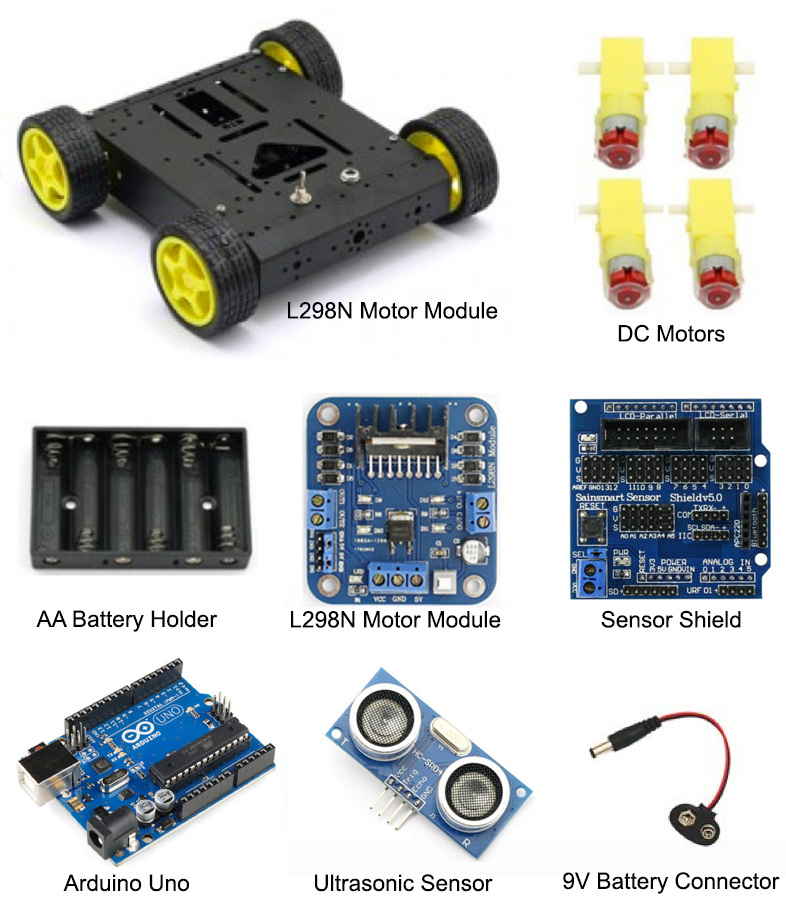
Assembling the car
The first thing to do is to assemble the car frame and attach the motors to the wheels. Once the car is assembled, you’ll need to wire up the different components. Follow these instructions and refer to the schematic below to connect the different components in the car.
-
Connect the red wire (voltage) from the AA battery enclosure to VCC on the L298N Motor Module.
-
Connect the black wire (ground) from the AA battery enclosure to GND on the L298N Motor Module.
-
Connect the red wire from Motor A1 (rear left) and the red wire from Motor A2 (front left) to OUT1 on the Motor Module (both wires can be twisted together and will go into OUT1 – the schematic further down this page shows how to do this).
-
Connect the black wire from Motor A1 (rear left) and the black wire from Motor A2 (front left) to OUT2 on the Motor Module.
-
Connect the red wire from Motor B1 (rear right) and the red wire from Motor B2 (front right) to OUT3 on the Motor Module.
-
Connect the black wire from Motor B1 (rear right) and the black wire from Motor B2 (front right) to OUT4 on the Motor Module.
-
Connect a female-to-female jumper wire from ENA (Engine A) on the Motor Module to signal (S) pin 1 on the Sensor Shield (the #2 pin in the S row. There are three rows – S stands for Signal, V for Voltage and G for Ground).
-
Connect a female-to-female jumper wire from 5V (next to ENA) on the Motor Module to voltage (V) pin 1 on the Sensor Shield (it doesn’t really matter which pin for voltage as long as it is in the V row).
-
Connect a female-to-female jumper wire from IN1 on the Motor Module to signal pin 2 on the Sensor Shield.
-
Connect a female-to-female jumper wire from IN2 on the Motor Module to signal pin 3 on the Sensor Shield.
-
Connect a female-to-female jumper wire from IN3 on the Motor Module to signal pin 4 on the Sensor Shield.
-
Connect a female-to-female jumper wire from IN4 on the Motor Module to signal pin 5 on the Sensor Shield.
-
Connect a female-to-female jumper wire from 5V (next to ENB) on the Motor Module to voltage (V) pin 6 on the Sensor Shield (it doesn’t really matter which pin for voltage as long as it is in the V row).
-
Connect a female-to-female end wire from ENB (Engine B) on the Motor Module to signal (S) pin 6 on the Sensor Shield.
-
Attach the Ultrasonic Sensor to the front of the car with the sensor pointing forward to detect objects in front of the car. You can use a hot glue gun, tape, blu-tack, or a 3D printed/laser cut mount to attach the sensor and ensure it is firmly mounted. Make sure it is not too close to the ground as the sensor might accidentally detect the ground as an object to avoid.
-
Use female-to-female jumper wires to connect the Ultrasonic sensor to the Sensor Shield. Firstly, attach the TRIG pin from the Ultrasonic sensor to signal (S) pin 8 on the Sensor Shield. Attach the ECHO pin from the ultrasonic sensor to signal (S) pin 9 on the Sensor Shield. Attach the VCC pin from the Ultrasonic Sensor to the voltage (V) pin 10 on the Sensor Shield. Lastly, attach the GND pin from the Ultrasonic Sensor to the GND (G) pin 11 on the Sensor Shield.
-
Now stack the Sensor Shield on top of the Arduino Uno board making sure not bend or damage any pins when they are inserted into the Arduino pin slots. Connect a 9V Battery Barrel Jack Connector to a 9V battery and then plug this into the Arduino’s power port (see diagram below).
-
That’s it! Now all you need is batteries and to upload the code!
Please note: There are several variations of the sensors and modules and several different ways to wire this up. For example, you can add a charging component to charge batteries and you can also add different switches. There may be other better methods to use, but I have gone for the simplest way I know of to set this up.

The code
Here is the code to get your robot moving. Upload the following code to your Arduino using the Arduino IDE software. This code will make the car go forward and move around obstacles detected by the ultrasonic sensor. You can modify this code to use more sensors or to be remotely controlled using a smartphone app connected to the Arduino via Bluetooth.
Remote control with Bluetooth
Rather than using an ultrasonic sensor to make the car autonomous, you can use a Bluetooth module to remotely control the car wirelessly using a smartphone. You can modify this code to receive string commands from an app via a Bluetooth connection — use the Serial Monitor to check which commands are received and modify the code so that, for example, when a “forward” command is received the car will drive forward. There are a few apps available on the iOS App Store and Google Play Store for controlling an Arduino car via Bluetooth. You can download the LearnThruTech RC CarController App to connect to the Bluetooth module and send string commands to the Arduino to make the car go forward, back, left or right. Try it out!
Набор для сборки Smart Car Kit позволит вам собрать полноприводного (4WD) колесного робота на базе Arduino-совместимого контроллера. Управление роботом можно организовать с помощью ИК-сенсора или с использованием Bluetooth модуля. С помощью функциональных модулей, входящих в набор, робот может работать в режиме следования по линии, режиме избегания препятствий, режиме охранной сигнализации и др.
Для сборки вам потребуется только самый простой ручной инструмент, паяльник и немного воображения.
Состав набора:
1) Платформа-основа — 2 шт. (верх, низ);
2) Колесо для робота 66 мм — 4 шт.
3) Мотор-редуктор для робота — 4 шт.
4) Контроллер UNO R3 — 1 шт.
5) Плата расширения Sensor Shield V5.0 — 1 шт.
6) Кабель USB 2.0 (A-B) — 1 шт.
7) Драйвер двигателя L298N — 1 шт.
 Батарейный отсек 6*АА без разъема — 1 шт.
Батарейный отсек 6*АА без разъема — 1 шт.
9) Отсек для батарейки «Крона» 9В с разъемом питания — 1 шт.
10) ИК пульт управления (21 кнопка) с батарейкой — 1 шт.
11) Модуль инфракрасного датчика VS1838B — 1 шт.
12) Breadboard mini — 1 шт.
13) Сервопривод SG90 (180 град) или ES08MAII — 1 шт.
14) Кронштейн для сервопривода SG90 и HC-SR04 с крепежом — 1 шт.
15) Датчик линии TCRT5000 4 канала — 2 шт.
16) Bluetooth модуль HC-06 — 1 шт.
17) Ультразвуковой датчик измерения расстояния HC-SR04 — 1 шт.
18) Шлейф из 40 проводов П-П 20см — 1 шт.
19) Шлейф из 40 проводов П-М 20см — 1 шт.
20) Крепления для мотор-редукторов на платформе — 8 шт.
21) Крепеж (стойки М-М M3*30 — 6 шт., винты с потайной головкой M3*30 — 8 шт., винты М3*5 — 12 шт., винты М3*10 — 8 шт., винты М3*8 c потайной головкой -2 шт., винт 2*12 — 4 шт, гайки М3 — 18 шт., гайка М2 — 4 шт.)
Внешний вид деталей может отличаться от представленного на фото.
Пример скетча для колесного робота Smart Car Kit — в данном скетче реализована возможность ручного управления роботом через ИК-канал. А также есть автоматический режим, в котором робот «гуляет» сам, избегая столкновений с препятствиями.
Бумажной инструкции по сборке в комплекте нет.
Инструкция по сборке набора Smart Car.
Смотреть Видео-инструкцию
Инструкция по установке и настройке Arduino_IDE
Для работы робота не забудьте приобрести 6 батареек АА и 1 батарейку «Крона».
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки.
Набор предполагает самостоятельную сборку управляющего устройства на базе микроконтроллера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
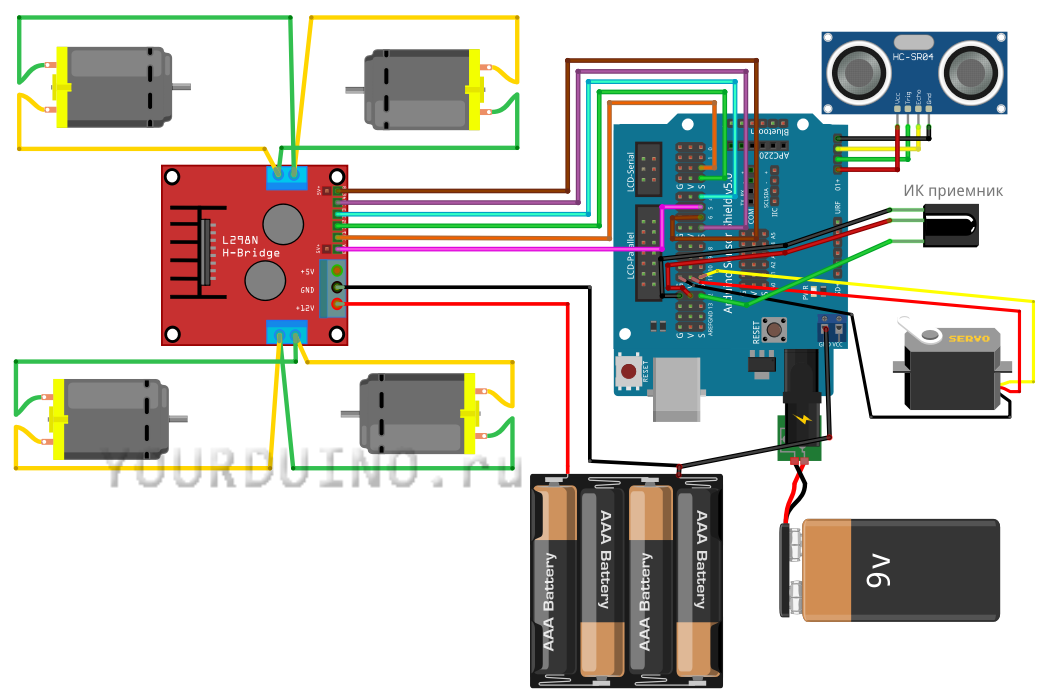
-
Роман 17.04.2019 20:26
хороший магазин качественные товары
Оценка:
Introduction: Arduino 4WD Robot (Now in English!)
In this Instructable, I will explain how to build an Arduino 4WD buggy that can be controlled with Bluetooth.
The following link will direct you to the site where I found this project:
https://www.hackster.io/andriy-baranov/smartphone-controlled-arduino-4wd-robot-car-14d239
Step 1: Requirements
Parts:
1x Arduino Unit
1x HC 06 RF Wireless Bluetooth Transceiver Slave Module
1x 4WD Smart Robot Car Chassis Kit (comes with wheels, engines, two baseplates, screws and plates for locking the engines in place)
2x SparkFun Dual H-Bridge motor drivers L298
4x LED lights
4x 220 Ohm resistors
1x Buzzer
2x Switch (on/off buttons)
1x Li-ion 9V battery
1x Arduino 9V adapter (black plug that goes into the Arduino unit.
A lot of cables (Both male-female and male-male. female-female might be needed, depending on your methods and accesibility to parts)
Software:
Arduino IDE (for programming the Arduino unit)
Arduino Bluetooth RC Car (app to control the buggy with)
Tools:
Solderingkit
Screwdriver(s)
Step 2: Wheels and Baseplates
The wheels and baseplates are relatively simple:
1. Begin with putting the plastic caps around the engines, if those have not been put on yet.
2. Strip a few cables and use the soldering kit and soldering iron to connect the stripped parts to the engine’s + and — connectors.
3. Secure the engines to the bottom baseplate with the small plastic plates and screws.
4. Put the wheels on the engine (and the black discs on the inside of the vehicle on the opposite side of the wheel if said discs are included).
5. Secure the second baseplate above the engines and bottom baseplate with the screws. If there are iron cylinders included, those can be used to put around the screws and secure both baseplates in place
For extra explanation or clarity, watch the video.
Step 3: Arduino Code
Arduino Code:
1. Use a cable to connect the Arduino unit to your computer. (these cables can be found somewhere around your printer.)
2. Open the Arduino program.
3. Set the port in the ‘Tools’ tab to upload to your Arduino unit.
4. Open the Arduino file that comes with this Instructable Step.
5. Click on upload, let the program compile the code and upload it.
6. There you go. This step done.
Step 4: Soldering
The following parts and cables need soldering:
For clarity on what needs to connect to what, look at the Wiring Diagram.
1. The lamps need to be connected to their resistors and their cables (probably need stripping).
2. The buzzer needs to be connected to its cables.
3. The 9V adapter needs to be connected to the switches and the 9V battery.
4. There are two occasions where two cables need to go into one Arduino port. This can be done by removing the black case around the end of the male cable end. Do this with the other cable as well. Insert one of the male ends into the hole on the side of the other and fill the whole with soldering tin. Then put a shrinking tube around it and heat it up a bit so the cables aren’t exposed and stay together.
For extra explanation or clarity, watch the video or look at the Wiring Diagram.
Step 5: The Rest of the Cables
The other cables are relatively simple
1. Use male-female cables to connect the Arduino unit to the H-Bridges and Bluetooth Slave Module and any other cables that only need to be plugged in.
2. The cables that need to connect to the H-bridge where the screws are can be done as followed: Raise the screw by unscrewing it partially (do not let it fall out). Then put the cables (both stripped or male ends will work) under the screw and re-secure the screw. Make sure the cables can’t just fall out.
3. Connect any other cables that still need connecting according to the Wiring Diagram with any acceptable method at your disposal (cables, soldering, etc.)
For extra explanation or clarity, watch the video or look at the Wiring Diagram.
Step 6: Use of the Buggy and My Result
To give the buggy power, connect the Li-ion battery and click the switches so that lights are burning on both H-bridges, the Bluetooth Slave Module and the Arduino unit.
If everything has gone according to plan and everything has power, you should be able to find the buggy in the list of Bluetooth devices to connect with on your Phone (your bluetooth must be on). If you try to connect it will request a PIN-code, this will either be 0000 or 1234. Now open the app, click on the settings icon. Click on ‘Connect To Car’ and select your buggy from the Bluetooth devices list.
Now you can drive it, remember to wear your seatbelt!
ATTENTION:
My cart (the one in the pictures) wasn’t a great success. I had to work with limited parts, some didn’t fit, some were missing, some were broken.
I HIGHLY recommend you get the parts that are in the list, don’t use something that you think might work, because the chance of it backfiring is present.