
Уровень сложностиСредний
Время на прочтение5 мин
Количество просмотров42K
За последние годы дроны стремительно переросли из нишевых хобби-девайсов в гибкие инструменты, применяемые для множества всевозможных задач — от фотографии до сельского хозяйства и даже военной сферы. В зависимости от назначения, характеристик и способности нести полезную нагрузку подобные устройства могут стоить от нескольких тысяч до миллионов.
И хотя основной принцип, лежащий в их основе, может казаться простым, для правильного функционирования дронов и реализации ими нужных задач применяются сложные технологии и вычислительные системы. Например, для сохранения стабильности в полёте необходимы прецизионные датчики вроде гироскопа, а также эффективная обработка считываемых ими данных. Нашим же проектом станет сборка небольшого дрона, управляемого с помощью смартфона.
Это будет миниатюрный квадрокоптер, который можно собрать из доступных компонентов в виде микроконтроллера ESP32, инерциального измерительного блока MPU6050, бесколлекторного двигателя и пластиковых пропеллеров.
Характеристики нашего будущего WiFi-дрона:
- Управление по WiFi с помощью смартфона.
- MPU6050 IMU для контроля стабильности полёта.
- Всё на одной печатной плате: конструировать на 3D-принтере ничего не придётся.
- Простота будущего апгрейда: можно будет расширить возможности дрона внешними модулями, например, добавить функцию удержания конкретной высоты или позиции.
- Небольшой размер и вес.
- Встроенное зарядное устройство.
- Встроенный USB-интерфейс для программирования и отладки.
- Поддержка приложений Android и iOS.
- Открытый исходный код.

▍ Схема дрона
Вся схема нашего WiFi-дрона:

Порт USB-C служит для зарядки и программирования. Его контроллер мощности на базе P-канального МОП-транзистора U2 и диода D1 позволяет легко переключаться между питанием от USB-источника и батареи. За регуляцию напряжения при этом отвечает LDO-стабилизатор MIC5219 3.3 В от Microchip. Движковый выключатель активирует тепловизор, а контроллер TP4056 управляет зарядкой батареи. Контроль напряжения облегчается за счёт классической схемы делителя. Модуль CP2102 вкупе с двойным МОП-транзистором упрощает сброс ESP32. Сам ESP32 при этом имеет стандартную обвязку. Гироскоп MPU6050, подключённый к ESP32 через контакты ввода/вывода, помогает стабилизировать полёт и контролировать перемещение дрона. Наконец, для управления электродвигателем в его схеме применяется N-канальный МОП-транзистор SI2302, дополненный защитными диодами и резисторами. Помимо индикаторов зарядки и питания, функциональный мониторинг дополняют отладочные светодиоды, включая синий для калибровки, зелёный для обнаружения подключения и красный для индикации низкого заряда батареи.
Более подробное описание и прочие детали описаны на странице проекта.
▍ Печатная плата
Для этого проекта мы решили собрать кастомную печатную плату. Это позволит сделать конечный продукт максимально компактным, а также упростит его сборку и использование. Причём мы специально включили в схему лапы коптера, чтобы их можно было через неё отключать. Вот верхний и нижний слои платы:

Вот сама плата:

А вот весь коптер в сборе:

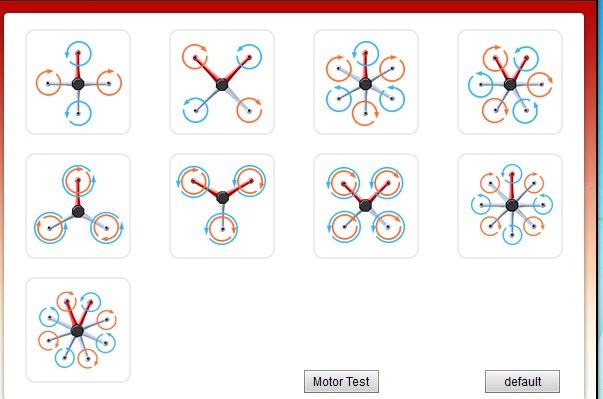
▍ Направление пропеллеров
Установите пропеллеры А и В в соответствии с рисунком ниже. Во время самотестирования при включении проверьте, вращаются ли пропеллеры должным образом и в правильном направлении.

▍ Прошивка коптера
Программное обеспечение для нашего малыша основано на прошивке ESP-дрона от Espressif. Код написан на фреймворке ESP-IDF и скомпилирован под его версией 4.4.5. Для установки и настройки ESP32 IDF 4.4.5 пройдите по ссылке. Можете либо собрать прошивку с нуля, используя код из указанного далее репозитория проекта, либо просто залить бинарник, лежащий там же в репозитории. Используйте код именно с указанного ресурса GitHub, так как есть много его модификаций, подходящих под дизайн нашей платы.
▍ Заливка прошивки
Залить ПО на коптер можно тремя способами.
▍ Способ 1: сборка из исходного кода с помощью ESP-IDF
- Для начала установки и настройки ESP-IDF, следуя подробной инструкции от Espressif. Вам понадобится версия ESP-IDF 4.4.х.
- После установки ESP-IDF клонируйте репозиторий прошивки дрона с помощью Git и перейдите в её каталог.
git clone https://github.com/Circuit-Digest/ESP-Drone.git cd ESP-Drone/Firmware/esp-drone- Изменять конфигурацию прошивки можно с помощью
menuconfig. Но для нашего случая вполне подойдут её текущие настройки.
idf.py menuconfig- Теперь для сборки и заливки прошивки используйте показанную ниже команду
flash, заменивPORTна имя последовательного порта вашего ESP32-S2. Эта команда автоматически соберёт и зальёт программу на плату.
idf.py -p PORT flash▍ Способ 2: использование ESPTOOL
Для использования ESPTool у вас должен быть установлен ESP-IDF. Соответствующие инструкции есть в предыдущем видео. После установки и настройки перейдите в терминале в каталог образа прошивки и залейте её с помощью следующей команды:
esptool.py write_flash --flash_size detect 0x0 ESPDrone.bin▍ Способ 3: использование ESP32 Flash Download Tool
- Скачайте ESP32 Flash Download Tool.
- Распакуйте его и запустите двойным кликом по файлу
.exe. В окне выбора типа микросхемы отметьте ESP32 и кликните «ОК». - Выберите файл прошивки с ESPDrone.bin и добавьте этот адрес в
0x00. Выберите нужный порт и кликните по Erase. По завершении стирания прошивки кликните START для заливки новой. - На этом всё — ваш самодельный коптер готов к полёту.
▍ Использование коптера
Расположите четырёхкрылого на плоской поверхности и включите. После включения полётный контроллер создаст точку WiFi. Подключитесь к ней с паролем 12345678 и откройте приложение. Версия для iOS доступна в App Store — ищите ESP-Drone APP. Для Android приложение можно скачать по этой ссылке. Помните, что оно разработано и распространяется сторонними лицами, так что устанавливайте по своему усмотрению. Интерфейс приложения выглядит так:

Для установки связи с коптером кликните по кнопке «Connect». После успешной установки подключения его светодиод замигает зелёным. Кнопка «Turn Lock» позволяет переключать левый контроллер в режим только «Up»/«Down». Левый стик служит для подъёма и посадки коптера, а правый — для управления его движением. Если коптер отключится от приложения или уйдёт в перезагрузку при попытке посадки, это сигнал о низком заряде батареи. Мы установили в него аккумулятор 1300 мАч 30C, вы же можете использовать аналог с более высокой токоотдачей.
▍ Предполётная проверка
- Располагайте коптер фронтальной частью вперёд (задняя часть определяется по антенне).
- Устойчиво расположите коптер на возвышенной поверхности и включите.
- После установки соединения, убедитесь, что зелёный светодиод мигает.
- Мигающий красный светодиод сигнализирует о необходимости зарядки батареи.
- Слегка сдвиньте вперёд контроллер «Thrust», чтобы проверить, реагирует ли коптер на команду.
- Используйте правый контроллер для проверки команд направления.
Более подробное описание и прочие детали доступны на странице проекта.
Telegram-канал со скидками, розыгрышами призов и новостями IT 💻

Сборка квадрокоптера собственными руками представляет захватывающий и увлекательный процесс, который не только позволяет глубже понять принципы полета, но и предоставляет уникальную возможность настроить дрон в соответствии с индивидуальными потребностями. Эта статья является пошаговым руководством, предназначенным для тех, кто готов погрузиться в мир авиамоделизма, собрав свою собственную модель квадрокоптера.
Многие энтузиасты беспилотной авиации испытывают стремление создать что-то уникальное и подходящее под их потребности. Собрав квадрокоптер своими руками, вы не только освежите свои знания в области электроники и механики, но и получите уникальную возможность настройки каждого компонента в соответствии с вашими личными предпочтениями. Этот опыт обеспечит увлекательное путешествие, наполняя удовлетворением от полета на созданном собственными руками устройстве.
В отличие от приобретения готового дрона, сборка своего квадрокоптера открывает целый ряд преимуществ. Во-первых, вы получаете полный контроль над выбором компонентов, что позволяет создать уникальное устройство с необходимой функциональностью. Во-вторых, сборка своего дрона может быть более экономичной альтернативой, поскольку вы можете выбирать бюджетные компоненты и избегать переплаты за готовое устройство. Кроме того, процесс сборки способствует лучшему пониманию устройства беспилотных систем и может стать отличным стартом для дальнейших исследований в области робототехники и авиации.
Содержание:
1.
С чего начать новичку?
2.
Из чего состоит комплект для сборки квадрокоптера
- Рама
- Полетный контроллер
- Моторы
- Винты
- Регуляторы скорости
- Батареи
- Приемники
- Пульт управления с передатчиком<
- FPV-система
- Различные инструменты
3.
Советы по сборке
Когда речь идет о комплектах для сборки дронов, важно учитывать разнообразие вариантов, которые могут быть как вызовом, так и увлекательным введением в мир дронов. При поиске в интернете можете использовать такие абревиатуры как — Almost Ready to Fly (ARF) что означает «почти готовый к полету». В этом случае, все необходимые компоненты уже тщательно подобраны и настроены, оставляя вам лишь сборку всех элементов воедино. Кроме того можете обратить внимание на такие аббревиатуры как: DIY (Do It Yourself): что означает «сделай сам» и RTF (Ready to Fly) Kit DIY-готовый к полету комплект для самостоятельной сборки. Также при выборе можете обратить внимание на комплекты, у которых пульт уже связан с передатчиком.
Мы рекомендуем новичкам начинать именно с таких комплектов. В них нет необходимости мучиться с настройкой сложной электроники, и можно сосредоточиться на процессе сборки. Это отличный способ погрузиться в мир дронов, избегая излишних трудностей на начальном этапе.
Постепенно, приобретая опыт, вы сможете экспериментировать с различными компонентами, например, менять раму, улучшать моторы или обновлять камеры. Таким образом, вы разовьете свои навыки в конструировании дронов, открывая для себя возможности в мире беспилотных летательных аппаратов.
4.
Из чего состоит дрон
Давайте рассмотрим основные компоненты, включенные в комплект для сборки квадрокоптера.
В начале, следует отметить раму как фундаментальный элемент. Рама представляет собой базовую структуру, на которой устанавливаются все остальные компоненты. Материалы, используемые для изготовления рамы, могут варьироваться от легких пластиков до прочных карбоновых волокон, что придает дрону необходимую прочность и легкость.
Вторым ключевым компонентом является полётный контроллер, отвечающий за управление стабильностью и движением квадрокоптера. Это устройство представляет собой плату, оборудованную датчиками и разъемами для подключения других устройств, часто обладает монтажными отверстиями для удобства интеграции.
Следующий важный элемент — моторы и винты. Моторы представляют собой электрические двигатели, обеспечивающие вращающееся движение лопастей, которые в свою очередь крепятся к винтам. Винты, изготовленные из пластика или углеродных материалов, бывают разных форм и размеров, включая двухлопастные, трехлопастные и другие конфигурации, что дополняет возможности дрона в воздухе.
Регуляторы скорости (ESC) — это электронные устройства, которые контролируют скорость и направление вращения моторов квадрокоптера. Они получают сигналы от полетного контроллера и подают электрическое напряжение на моторы. Регуляторы скорости нужны для того, чтобы квадрокоптер мог стабильно летать и выполнять различные маневры.
Регуляторы скорости обычно выглядят как маленькие платы с проводами и разъемами. Они имеют три основных параметра: ток, частота и прошивка. Ток — это максимальная сила тока, которую может выдержать регулятор скорости. Частота — это скорость, с которой регулятор скорости меняет напряжение на моторах. Прошивка — это программное обеспечение, которое определяет алгоритм работы регулятора скорости.
Дополнительные компоненты включают в себя батареи, обычно литий-полимерные аккумуляторы различной ёмкости и напряжения, обеспечивающие энергию для работы дрона.
Приёмник (RX) и пульт управления с передатчиком(TX) представляют собой важные компоненты в беспилотных системах, таких как квадрокоптеры. Приёмник, установленный на борту дрона, принимает радиосигналы от передатчика в руках пилота. Этот компонент декодирует сигналы и направляет информацию контроллерам и другим системам, обеспечивая эффективное управление квадрокоптером. С другой стороны, передатчик представляет собой ручное устройство управления в руках пилота, отправляющее радиосигналы на приёмник. Обычно это ручной контроллер или пульт с антенной и разнообразными элементами управления, такими как стики и кнопки.
В комплект для сборки квадрокоптера может входить FPV-система, предоставляющая возможность передачи видеоизображения в режиме реального времени. Эта система включает в себя камеру, специальные FPV-очки для погружения в полёт или монитор, который может быть интегрирован в пульт управления или приобретен отдельно с антеннами.
Если ваша цель — создание FPV-съемки, кроме камеры, вы можете рассмотреть возможность установки регистратора, такого как камера GoPro, для записи высококачественного видео. В некоторых комплектах уже могут включаться камеры, передатчики и мониторы, или даже FPV-очки, в зависимости от выбранного вами набора.
Различные инструменты, такие как разные отвертки для крепления болтов и винтов, кусачки для обрезания проводов и кабелей в случае отсутствия специальных разъемов, паяльник и припой в некоторых случаях, клей или клейный пистолет, мультиметр для измерения напряжения, силы тока и проверки цепей, изолента и специальные стяжки, набор шестигранников, комплекты винтов, гаек и ключи для гаек. Обязательно наличие инструкции в комплекте, также проверьте, есть ли видеоинструкции для выбранного квадрокоптера, так как видео обычно предоставляет более подробные пошаговые рекомендации.
5.
Сборка
Ниже приведены основные шаги по сборке квадрокоптера. Учитывая, что сборка может различаться в зависимости от модели и комплекта, предоставляем лишь примерные инструкции для ознакомления с возможными этапами. Различные модели могут иметь уникальные варианты сборки, поэтому предлагаем данную инструкцию в качестве ориентира, чтобы вы понимали, с чем можете столкнуться при сборке своего первого квадрокоптера. Также настоятельно рекомендуем дополнительно изучить видеоинструкции для более наглядного понимания процесса с каждой конкретной моделью перед покупкой.
Следуйте этим основным шагам для успешной сборки:
1. Внимательно распакуйте комплект рамы и удостоверьтесь, что все необходимые части находятся в комплекте. Проверьте наличие инструкции по сборке.
2. Следуйте инструкциям, чтобы правильно соединить части рамы. Обратите внимание на правильное расположение отверстий для монтажа моторов.
3. Установите моторы на соответствующие места на раме. Убедитесь, что они крепко закреплены, используя предоставленные болты или крепежные элементы.
4. Установите контроллер полета регистраторы скорости и другие компоненты на выбранные места на раме. Обеспечьте аккуратную укладку проводов.
5. Подключите регуляторы скорости к моторам с помощью разъемов или паяльника. Обратить внимание на цвета проводов и направление вращения моторов.
6. Подключите регуляторы скорости к полетному контроллеру. Обратите внимание на порядок подключения регуляторов скорости к каналам полетного контроллера.
7. Закрепите регуляторы скорости на раме квадрокоптера с помощью скотча, стяжек или других крепежных элементов. Убедитесь, что регуляторы скорости не мешают другим компонентам и не подвергаются перегреву.
8. Решите, где будет размещен аккумулятор. Надежно закрепите его на раме с использованием крепежных элементов или резиновых ремней. Подключите его к основной системе.
9. Калибровка моторов: Для калибровки моторов следует выполнить следующие шаги: поставте квадрокоптер на ровную поверхность, присоедините квадрокоптер к компьютеру, запустите специальную программу, настройте моторы постепенно увеличивая силу, чтобы они начали вращаться, удостоверьтесь что все моторы вращаются одинаково и плавно. Затем просто сохраните настройки.
10. Установите пропеллеры на моторы, следуя указаниям в инструкции. Обратите внимание на правильное расположение и ориентацию лопастей. Убедитесь, что они крепко закреплены, используя предоставленные болты или крепежные элементы.
11. Загрузите необходимое программное обеспечение на контроллер полета и настройте параметры, такие как стабилизация и калибровка гироскопа.
12. Тестирование: Перед первым полетом проведите тщательное тестирование всех систем. Проверьте реакцию дрона на управление и корректность работы всех компонентов.
13. Калибровка компаса: При необходимости, проведите калибровку компаса для улучшения точности навигации в полете.
В заключении:
Мы надеемся, что данное пособие стало полезным ресурсом для тех, кто только начинает свой захватывающий путь в мир авиамоделизма. Помните, что сборка первого квадрокоптера — это лишь начало вашего увлекательного путешествия.В следующих статьях мы рассмотрим более глубокие аспекты, такие как настройка, выбор запчастей, подборка моделей для сборки, предоставив вам возможность глубже погрузиться в удивительный мир квадрокоптеров. Однако, чтобы сделать первый шаг легче, рекомендуем начать с готовой версии, где все запчасти уже в комплекте, и базовая настройка уже выполнена. Это позволит вам сосредоточиться на минимальных настройках и постепенно развиваться в этом увлекательном хобби. Следите за нашими обновлениями, и помните, что каждый новичок в авиамоделизме делает важный шаг к более увлекательному будущему в мире квадрокоптеров.
Основы коптеростроения. Григорий Колодяжный, Пятигорск.

Всем привет! После выхода первого же ролика, снятого с собранного мной гексакоптера, народ стал одолевать вопросами и просьбами помочь в постройке аппарата.
В наше время нет дефицита информации, напротив, есть её переизбыток, который очень сложно фильтровать.

Хочу в своей статье ответить на те вопросы, которые поступают практически каждый день от моих знакомых.
А именно:
— Какой коптер лучше и чем они отличаются? (квадро-, три-, гекса-, октакоптер)
— Купить готовый, или собрать самому?
— Какие комплектующие подобрать? Как рассчитывать? Каков минимальный набор для полёта?
— На что снимать – на GoPro или камеру потяжелее?
Думаю, что для начала этих вопросов хватит, чтобы заставить закипеть мозг тех, в чьих головах пока есть только желание разобраться с основами, но нет опыта за плечами.
Прошу не принимать всё написанное за единственно верную истину. Как раз хочу объяснить, что я человек с творческо-техническим складом ума, но не живу в своем ограниченном мире коптеростроения. Напротив, я новичок в этом вопросе и пишу статью потому, что загоревшись желанием построить дрона для аэросъемки, столкнулся с тем, что очень много разных мнений и выбрать верный путь очень сложно. Мой первый опыт был не совсем удачным, от этого и хочу всех уберечь, выделив самое важное и акцентируя внимание на важные детали, о которых мало говорят.
Итак, чем же отличаются коптеры и откуда такие названия? Квадрокоптер – это четырехвинтовой аппарат. Этот тип БПЛА (беспилотных летательных аппаратов) на сегодняшний день является самым распространенным и уже фактически стал именем нарицательным для народа, если речь идет о мультироторных системах. Самый известный четырехмоторный дрон выпустила компания DJI, практически все о нем слышали. Это тот самый Phantom. Но разбирать все модификации бессмысленно. Единственное, я надеюсь, что после прочтения этой статьи вы сами сможете просчитать параметры и понять, почему полетное время между первым и вторым поколениями Phantom’ов изменилось почти вдвое.
Гексакоптер — это шестимоторный, а октакоптер, соответственно, восьмимоторный аппарат. Есть еще трикоптеры и так называемые соосные. И тут много споров на тему, как правильно назвать аппарат с 8-мью моторами, но 4-мя лучами, соосный квадрокоптер или всё-таки октакоптер. Моторы располагаются на одной оси один над другим. У такого расположения есть одно преимущество — размеры. Но на практике те же 8 моторов на октакоптере будут давать более высокий КПД, чем установка на одной оси парных двигателей.
Как вы понимаете, вся разница в количестве винтов, сказывается в первую очередь на подъемной силе и стабильности аппарата. То есть логично, что при всех равных условиях маленькому квадрокоптеру будет сопротивляться с ветром намного сложнее, чем большому октакоптеру. Во-первых, больший вес сложнее сдвинуть с места, во-вторых, большая длина рычага (луча рамы, на конце которой установлен мотор с пропеллером) говорит о том, что один и тот же порыв ветра способен накренить аппарат большего размера на меньший угол относительно горизонта. Следовательно, многомоторные системы более устойчивы к худшим погодным условиям.
Хочу коснуться еще одной темы — основ понимания физики поведения мультикоптеров. Эти аппараты управляются легче, чем любые другие летающие модели: самолёты, вертолёты, планеры и т.д. Для полётов коптера необходимо минимум 4 канала аппаратуры управления.
1 канал — Элероны (aileron) — это канал, который отвечает за направление влево-вправо.
2 канал — Элеватор (elevator) — это канал, отвечающий за движение вперед-назад.
3 канал — Газ (throttle) — это канал газа. Отвечает за набор и снижение высоты.
4 канал — Рысканье (rudder) – отвечает за вращение вокруг своей оси.
Остальные каналы в аппаратуре (моделисты любят использовать слово «аппа»- это тот самый пульт-передатчик в руках «пилота» и приемник на борту аппарата) используются для управления осями подвеса камеры, для складывания шасси, надстройки уровня чувствительности аппарата к внешним условиям (PID параметры в полётном контроллере, отвечающие за силу и скорость реакции коптера на сигналы управления, сопротивление погодным условиям), для переключения режимов полёта (к примеру GPS, Attitude, Manual, Failsafe, Home lock, Course Lock). Как говорят опытные авиамоделисты, много каналов не бывает, поэтому у них есть одно важное правило – покупать сразу хорошую надёжную аппу известных брендов. Лучшими считаются производители: Futaba, Spectrum, JR.

Время летит, поэтому добавляю в статьи свежие строки, актуальные на сегодняшний день, спустя несколько лет после написания статьи. Буду помечать их курсивом и добавлять ссылки на примеры комплектующих в проверенных магзинах, в которых сам совершал покупки.
Из бюджетных, но проверенных временем аппаратур управления пользуется популярностью FRSky Taranis Q X7. И старший брат — FrSky Taranis X9D Plus
Одна и та же хорошая аппаратура способна хранить в себе настройки одновременно десятков моделей. То есть, однажды приобретая её, можно пользоваться ею фактически всю жизнь и управлять RC самолётами, вертолётами, машинами, мультикоптерами, просто выбирая в меню аппаратуры нужную модель (но закладывать настройки каждой модели нужно самому вручную). Так вот, для чего же на практике люди используют дополнительные каналы? Если вы планируете заниматься аэросъемкой, то минимум 2 канала нужно на управление трех-осевым подвесом – канал YAW отвечает за рысканье (поворот вокруг своей вертикальной оси, горизонтальное панорамирование), PITCH – канал тангажа, то есть наклон камеры вверх\вниз. Как правило наклон оси ROLL (горизонта) регулировать не нужно, так как сложно придумать ситуацию, когда на видео нужно нарочно завалить горизонт. Иногда люди используют дополнительную курсовую камеру на сервоприводах, которой вообще можно управлять движениями головы. Лично я реализовал такое управление своим подвесом с камерой GoPro, которая одновременно является и курсовой и основной камерой. Для этого устанавливается датчик head tracker в видео очки или FPV-шлем (First person view – вид от первого лица), который соединяется с аппаратурой управления, а та в свою очередь передает сигналы на каналы управления нужных осей подвеса камеры. Для дополнительных каналов управления также можно придумать другие предназначения: от сброса транспортируемых коптером предметов до поджигания фитиля установленных на него ракетниц-фейерверков, тут всё ограничивается лишь полётом фантазии.
_
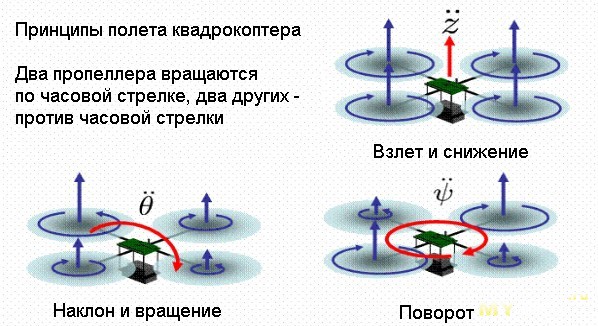
Еще важно разобраться с тем, как мультикоптер работает в целом. Понятно, что при движении стика газа вверх на аппаратуре управления, коптер просто прибавляет обороты на всех двигателях и происходит набор высоты. Чтобы полететь вбок, аппарат кренится в нужную сторону, увеличивая обороты двигателей с одной стороны и снижая с другой. При этом, за счет датчиков, соединенных с ПК (полётным контроллером), аппарат кренится только до ограниченного в прошивке контроллера угла, чтобы не перевернуться. Вперед и назад летает, соответственно, тем же принципом. А вот вращение вокруг своей оси происходит за счет того, что двигатели через один крутятся в противоположные стороны и пропеллеры должны быть соответствующие — одни загребают воздух под себя, вращаясь по часовой стрелке, другие — против. Получается, чтобы аппарат развернулся в нужную нам сторону, он увеличивает обороты двигателей вращающихся в одну сторону и ровно настолько же уменьшает обороты двигателей, вращающихся в противоположную.
_
Что касается «начинки», то мультикоптер состоит из рамы, на которую устанавливаются двигатели. Сигналы на вращение двигателей идут из полётного контроллера (ПК), но мощности этих сигналов не достаточно, поэтому перед каждым двигателем стоит регулятор оборотов (в простонародье «регуль», ESC).
Также на борту стоит приемник сигналов управления, который передает их в ПК.

Современные полётные контроллеры такие, как распространенный DJI Naza-m v2 представляют собой целые наборы.

Контроллер уже включает в себя виброразвязку, поэтому его не нужно ставить на демпферную площадку, а нужно крепить прямо на корпус. Также у него на борту находится гироскопический, барометрический датчики, магнитометр, компас и дополнительно подключается модуль GPS, чтобы аппарат мог вернуться на точку взлета сам, если потеряет связь с аппаратурой управления, но это не единственная функция. К данному полётному контроллеру в комплекте идет модуль PMU и LED, а также может подключаться модуль bluetooth и OSD телеметрия. Также на борту стоит батарея, питающая всю систему и может стоять дополнительная батарея для приемника аппаратуры управления. Данный полётный контроллер установлен в современных квадрокоптерах DJI Phantom 2, но его возможности намного шире рамок этого небольшого аппарата.
Выше перечислен минимальный набор, который можно назвать мультикоптером. Он может взлететь, если имеется «аппа», но этого не достаточно для съемок. Пишу это к тому, что многие, узнав бюджет на весь мой аппарат с камерой и дополнительным оборудованием, удивляются и спрашивают, почему я не купил за эту сумму готовый более серьезный аппарат. Ответ в том, что дополнительное оборудование для управления, съемки, стабилизации и контроля стоит намного больше, чем сам мультикоптер.
И всё-таки, собрать самому, или купить готовый? На этот вопрос вы ответите сами себе, прочитав всю статью и осознав все за и против. Многие, как я уже написал, критикуют меня в том, что я потратил большую сумму на сборку аппарата, который фактически умеет то же самое, что DJI Phantom 2. Сумма со всеми допами подбирается к 200 тысячам рублей. Но сюда входит и стоимость аппаратуры управления Futaba 10J с заводским режимом мультикоптеров, в паре с родным передатчиком работающей до 4 км и имеющей очень надежную помехоустойчивость. Сюда же вошла и камера GoPro 4 black, подвес Fy-G3, очень мощный FPV-передатчик и приемник на 1000 мВатт 1,2 Ггц с изготовленными под заказ клеверными антеннами, покрывающими расстояние до 12 км и фильтром, чтобы срезать частоты, наиболее влияющие на аппаратуру управления, чтобы не забить ненароком сигнал приемника. Также в этой сумме FPV-видеошлем eYebox с потрясающей цветопередачей, детализацией и углом обзора (а до него были очки Fatshark BASE SD, которые мне не понравились в сравнении со шлемом и я решил их продать).
Говоря о вопросе покупки готового собранного аппарата – можно однозначно ответить – покупайте проверенные, если Вы планируете использовать их только для того, для чего они созданы. То есть если Phantom 2 создан, чтобы поднимать GoPro, вы не повесите на него зеркалку, вы не увеличите время его полёта, из него выжат максимум очень грамотными специалистами.
Собирать коптер самостоятельно – это выбор тех, кому нравится решать сложные задачи. То есть для людей, которые получают удовольствие от самого процесса расчетов и сборки. Преимущества собранного своими руками аппарата в том, что он подлежит апгрейду, на него можно вешать любое дополнительное оборудование. Но важно понимать, что аппарат изначально рассчитывается под определенный полётный вес, время полёта. А вот, так сказать, запас тяги может привести к плачевным последствиям.
Конфигурация моего нынешнего гексакоптера такова:
1. Рама: Tarot fy-680.
2. Контроллер: dji naza-m v2 c gps.
3. Моторы: sunnysky v3508 kv580
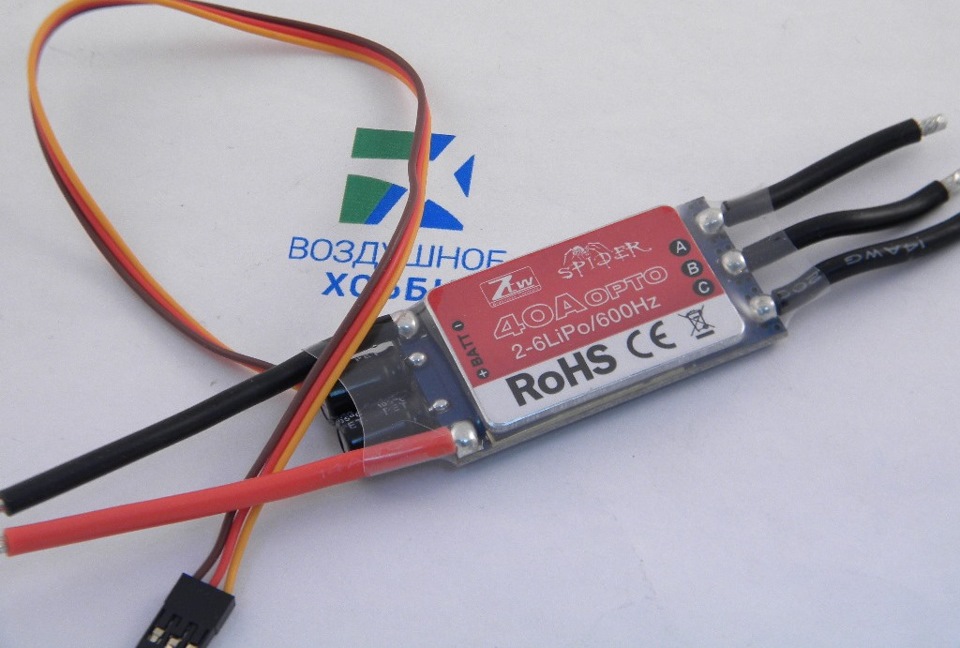
4. Регуляторы: Hobbywing Platinum PRO 30A OPTO ESC(2-6s).
5. Пропеллеры: карбон 1255.
6. Батареи: lipo 4S turnigy 5000 mah 30-45C и 8000 mah 20-30 C (вес 500 и 800 грамм).
7. Аппаратура управления и приемник: Futaba 10J.
8. Подвес для gopro3 : Feiyu Tech fy G3 gimbal.
9. OSD телеметрия DJI iOSD mini.
10. BAC трансформатор с выводом на 5V для подпитывания камеры во время полёта.
Снаряженный вес без батареи 2600 грамм.
Изначально была немного иная конфигурация. Аппарат летал на батареях 3S, двигателях sunnysky 2216 kv800 и пропеллерах 1045 и 1238 (но на 1238, которые прислал продавец по ошибке, аппарат разбился).
Если вы всё-таки решились собирать мультикоптер самостоятельно, попробую объяснить основные принципы. Важно сразу понять, какой снаряженный вес будет в итоге у аппарата и вести расчеты, отталкиваясь от него. Можно найти готовые конфигурации на форумах и перепроверить их на специальном калькуляторе, о котором я расскажу далее. Важен также такой момент, что этот калькулятор не знает, возможно ли физически установить пропеллеры расчетного размера на вашу раму и можно ли их вообще ставить на заданные двигатели.
1. Поэтому первым делом определяемся с рамой, узнаем её вес, максимальный размер пропеллеров, которые возможно установить.
2. Подбирая моторы, сразу смотрим на сайте производителя таблицы характеристик с рекомендуемыми пропеллерами. К примеру я использую моторы SunnySky v3508 kv580
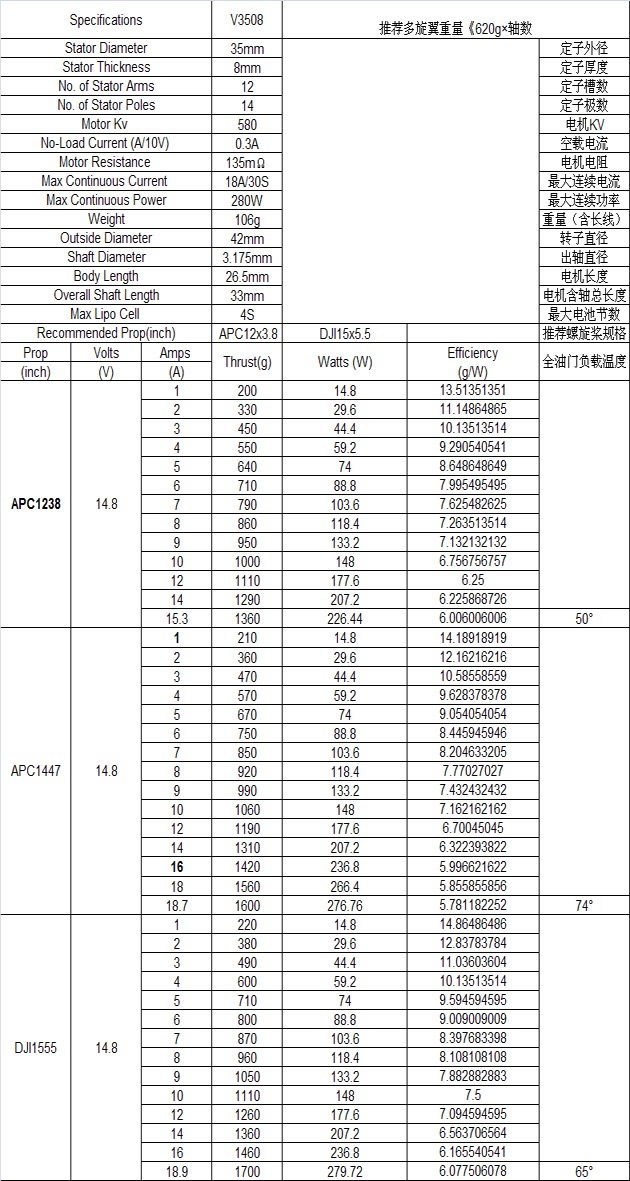
И тут хочу акцентировать внимание на параметры мотора. В названии мотора зашифрованы его основные параметры V3508 kv580, где v — это серия, 35мм — диаметр статора, 8 мм — это длина статора. А параметр KV говорит об оптимальных для данного мотора оборотах висения летательного аппарата. То есть, имея оптимальные обороты висения и вес аппарата, нам придется под них подбирать пропеллеры с нужными параметрами, чтобы добиться оптимальных показателей. В таблице видно, что для данных моторов производителем рекомендуются 3 вида пропеллеров: 1238, 1447 и 1555. Во втором столбце видим, что везде значение напряжения стоит 14.8 вольт. То есть данные моторы используются только с 4S батареями. Для одних и тех же моторов в таблице могут даваться показания для разного вольтажа, и нужно быть очень внимательным, ведь моторы, которые работают и с 11.1 вольтовыми 3S батареями и с 14.8 вольтовыми 4S батареями, как правило, допускают максимальный размер пропеллеров при 3S батареях меньше, чем при 4S, так как мотору может просто не хватить мощности раскручивать тяжелые для него пропеллеры, и есть вероятность перевернуть коптер вверх ногами прямо в полёте. (Со мной такое случалось). Вот пример таблицы для моторов SunnySky 2216 kv800
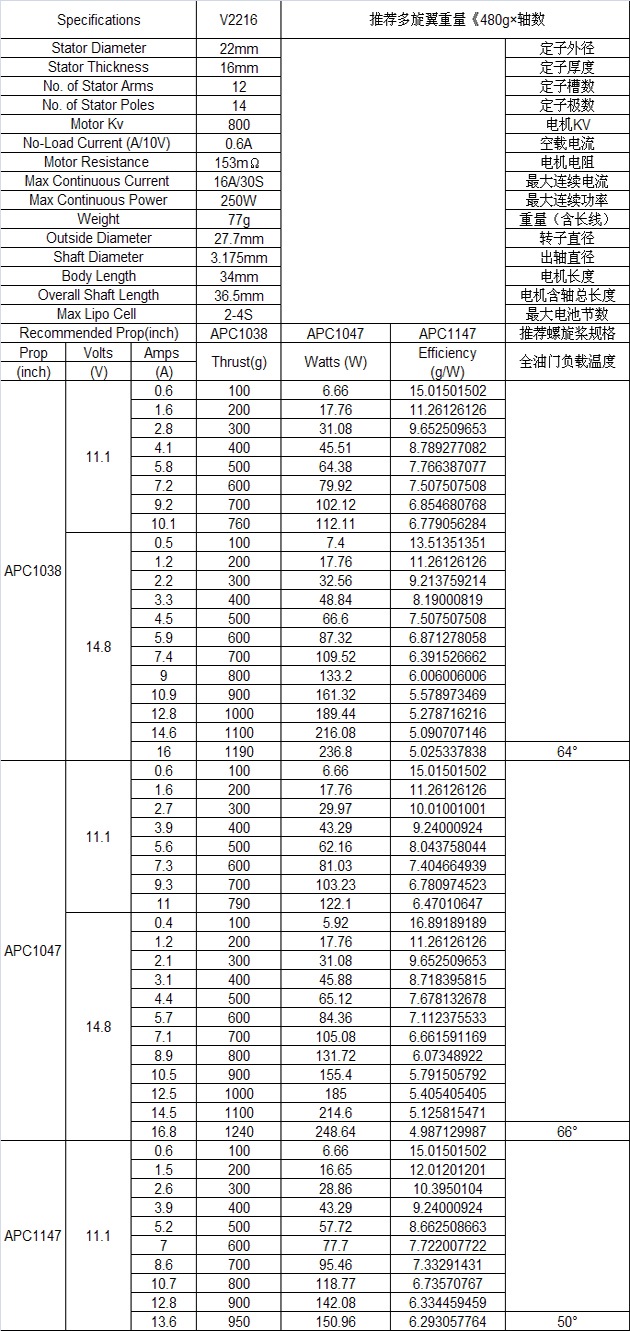
Из этой таблицы видно, что с моторами 2216 при использовании 11.1 вольтовых батарей можно ставить пропеллеры максимального размера 1147, а при 14.8 вольтовых максимум 1047-е пропеллеры. Теперь, чтобы сложить картину воедино, следует пояснить маркировку пропеллеров. На самом деле, размер обозначает только первое двузначное число, а второе означает шаг. Размеры даются в дюймах. Маркировка 1047 означает, что пропеллеры 10-тидюймовые, а шаг на один оборот составляет 4,7 дюйма.
Выше я уже привел ссылку на видео случая из моей первой конфигурации, когда я на моторы 2216 kv800 установил пропеллеры 1238. На видео с 17й секунды видно, что при снижении, либо порыве ветра аппарат начинает амплитудно раскачиваться. Закончилось это тем, что коптер перевернулся в воздухе и приземлился вверх ногами на асфальт. Во-первых, моторы перегреваются и могут вообще перегореть в полёте, во-вторых, у них банально не хватает силы резко раскручивать нужные пропеллеры для стабилизации положения коптера, в итоге аппарат себя раскачивает все сильнее и сильнее.
Также, прежде чем перейти к этапу расчетов, важно пополнить свои знания информацией о литий-полимерных батареях. Они встречаются сейчас повсеместно — в телефонах, планшетных компьютерах, ноутбуках и других устройствах. Эти батареи имеют максимальную ёмкость относительно веса и максимальную токоотдачу, минимальное время заряда. Но при этом батареи токсичны и даже взрывоопасны.
Они непременно взрываются при сильном механическом повреждении, при чрезмерном перезаряде, при замыкании. Эту информацию важно знать и тем, кто не планирует собирать себе коптер.
Li-Po батареи нужно заряжать, транспортировать и хранить в специальных огнеупорных конвертах.

Теперь давайте разберем параметры в описании батареи.

К примеру :
ONBO 5200mAh 4S 45C Lipo Pack:
• Емкость: 5200mAh
• Напряжение: 4S1P / 4 Cell / 14.8V
• Ток разряда: 45C продолжительный / 90C пиковый
• Вес: 485г (включая провода, разъемы и корпус)
• Размеры: 160x50x32мм
• Балансировочный разъем: JST-XH
• Силовой разъем: T-connector
Что же означают эти 2S, 3S, 4S? 6S и на что они влияют?
Параметр S означает количество ячеек, либо банок. Каждая ячейка представляет собой отдельную батарею указанной ёмкости, но её номинальное напряжение 3.7 вольта, а напряжение полностью заряженной ячейки составляет 4.2 вольта. Поэтому номинальное и полное напряжение 2S аккумулятора составляет 7,4-8,4 вольта, 3S – 11,1-12,6 вольт, 4S – 14,8-16,8 вольт и т. д.
У аккумулятора имеется балансировочный разъем, к которому можно подключить индикатор напряженияи следить как за общим уровнем заряда батареи, так и за уровнем заряда в каждой ячейке.

Подобный индикатор настраивается на определенный уровень напряжения, по достижении которого на любой из ячеек он начинает сигнализировать громким писком. Это очень удобно, если отправлять аппарат в полёт с подключенным устройством, которое настроено на 3,4 вольта. Чтобы знать, что пора приземлять коптер. Ведь важно знать, что порог, до которого можно разряжать Li-Po аккумулятор, чтобы он прослужил долгое время, составляет 3.3 вольта на банку. При полной разрядке аккумулятора, он теряет значительную часть своей ёмкости.
А для правильной его зарядки требуется специальное зарядное устройство, которое умеет балансировать ячейки до равного напряжения и при этом не перезаряжать, чтобы не допустить возгорания.

Подобная зарядка также способна заряжать (либо разряжать) до номинального напряжения для хранения батарей, ведь хранение полностью заряженных батарей тоже негативно сказывается на их ресурсе.
Возвращаясь к описанию параметров батарей, хочу разобрать параметр “C” – обычно встречаются цифры 10C, 20C, 30C и т. д. Данный параметр равен ёмкости элемента. Грубо говоря, 1С — 5000 mah составляет 5A за 1 час, а если батарея с током разряда 20C, то она способна полностью отдать свой заряд в 20 раз быстрее часа, то есть за 3 минуты. Но в то же время рекомендуемый ток заряда для большинства батарей не должен превышать 1С. Но значение максимального тока заряда указывается в описании к каждой батарее. Тем не менее, более качественный и щадящий заряд идет именно током 1С – то есть, если емкость батареи 2000 mah, то заряжать её желательно током не более 2 ампер. А если емкость батареи 4000 mah, то тот же 1С для такой батареи уже составит 4 ампера.
Если вы осилили всю эту теорию, переходим к самому интересному. Давайте научимся пользоваться калькулятором для расчета мультикоптеров.
Скажу сразу, он «буржуйский», поэтому просит внести лепту. Но мы- россияне, поэтому есть легальный способ пользоваться всеми функциями сего ресурса без финансовых вложений. Заключается он в перезагрузке сайта, если не находите в списке нужных двигателей или аккумуляторов в базе. При каждом заходе база обновляется. Но могу добавить, что многие двигатели являются аналогами, поэтому можно подобрать двигатель другого производителя с такими –же размерами и параметром KV.
Вот пример моей конфигурации в полном снаряжении:
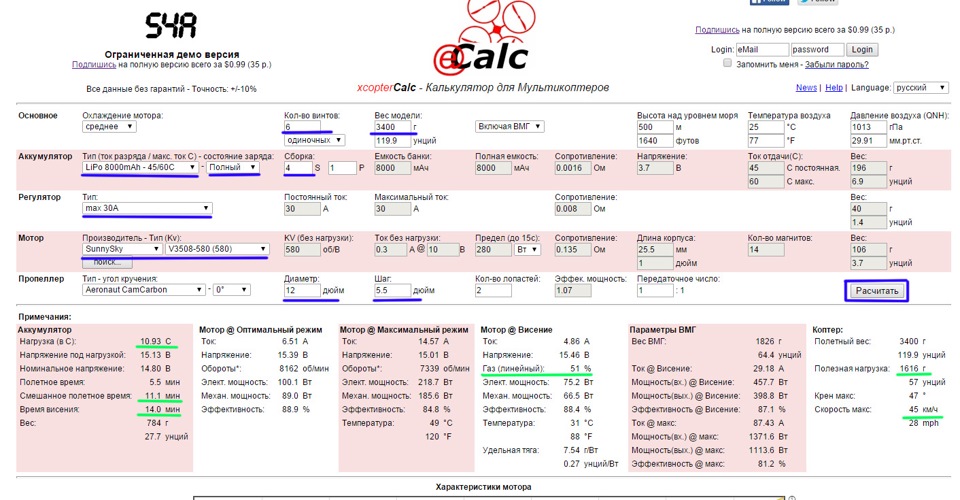
Синим я пометил параметры, которые менял в таблице с параметров по умолчанию после загрузки страницы, а зеленым – наиболее важные строки, на которые стоит обращать особое внимание при расчетах. Как видно, газ висения подобран практически идеально. Для полётного контроллера naza желательно подбирать значения в пределах от 40% до 60%. Газ висения не означает, что если вы оставите стик газа на управлении ровно посередине, мультикоптер начнет подниматься при переизбытке тяги, или опускаться при её недостатке. Нет, на самом деле полётный контроллер сам регулирует обороты двигателя, для того, чтобы оставаться на заданной высоте при положении стика газа ровно посередине. Но если газ висения будет более 60%, значит аппарат перегружен, нужно пробовать пропеллеры с большим шагом, либо большего размера (если это позволяет рама и характеристики двигателей).
Для примера я посчитал эту же конфигурацию, если установить пропеллеры 1447.
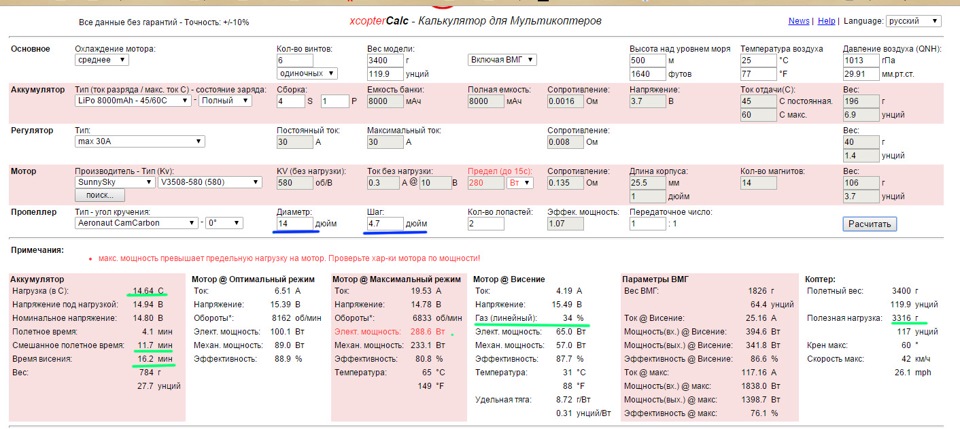
Видим, что совсем незначительное увеличение времени полёта ощутимо сказалось на нагрузке аккумулятора, которая возросла с 11 до 15С и нагрузке на мотор. В максимальном режиме даже выводится предупреждение о превышении допустимой нагрузки. Но при этом полезная нагрузка возросла почти вдвое, а газ висения снизился до 34%, то есть образовался небольшой избыток тяги. Такая конфигурация подошла бы, если бы я захотел повесить на свой коптер не GoPro, а камеру типа Panasonic GH4K или sony nex. Но тогда время полёта ощутимо сократится, ведь возрастет вес. Для полётов с такими камерами я приведу расчет в самом конце, а пока привожу пример, если на такой-же конфигурации использовать батарею большой ёмкости – 16000 mah. Её вес 1 кг (10С), она относительно недорогая – на сегодняшний день можно купить ее за 7300 руб с доставкой по РФ. Но и пропеллеры в расчетах уже ставлю не 1255, а 1355, так как возрастет вес аппарата.
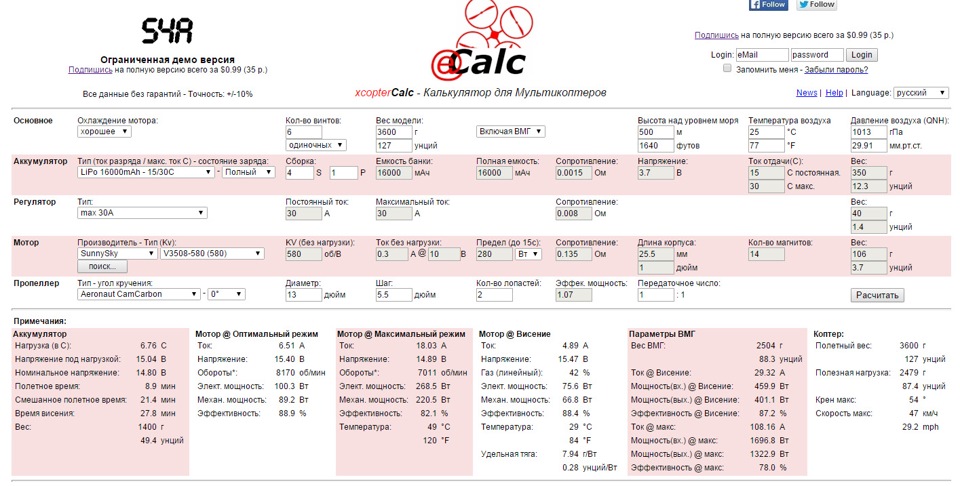
Расчетное время полёта в полном снаряжении уже составляет порядка 22 минут, а время висения подбирается к 30 минутам. На самом деле эти расчеты дают лишь приблизительное время полёта. В теории, в самой первой конфигурации расчетное время полёта 11 минут, а на практике оно составляет 16, а время висения 19 минут до звукового сигнала о достижении на одной из ячеек аккумулятора напряжения в 3,4 вольта под нагрузкой. И обратите внимание, нагрузка на аккумулятор составляет всего 6.76С. То есть, чем больше емкость аккумулятора, тем меньше нужно обращать внимание на эту цифру. Я бы даже сказал тем лучше, если эта цифра будет не в пределах 30-40, так как данный параметр скажется лишь на весе аккумулятора. Если расчетная нагрузка имеет запас почти в полтора раза, а пиковая нагрузка на аккумулятор и так обычно превышает почти вдвое заявленный параметр долгосрочной нагрузки (10-20С) (30-45С), нет смысла покупать более дорогой и тяжелый аккумулятор.
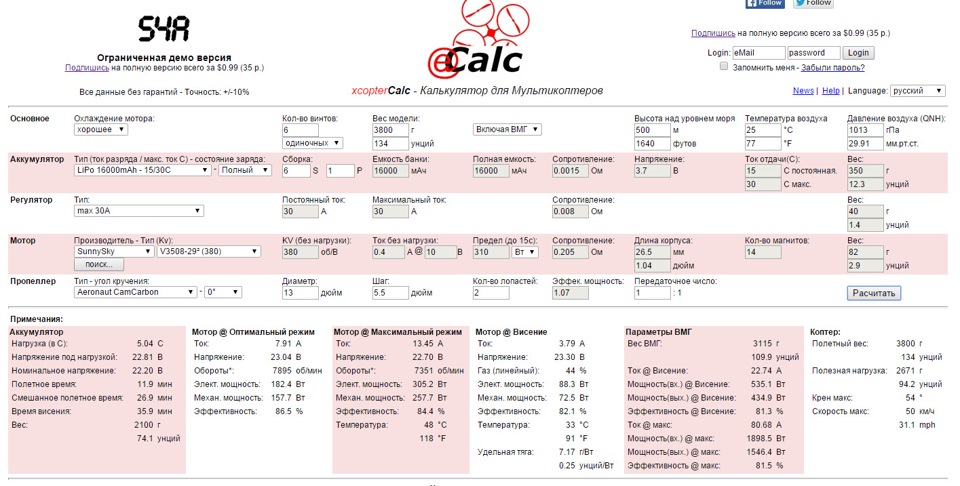
Если же нужно собрать настоящий грузоподъемный «долголёт», то тут нужны низко-оборотистые мощные двигатели такие как SunnySky kv380 и 6S батарея.
Что касается известного всем DJI Phantom 2, то его полётный вес составляет 1400 грамм, моторы dji 2312 kv960 (у первого «фантома» 2212 kv920), пропеллеры 9450 (у первого 9443), батарея 3S 5200 mah (у первого 2200 mah), регуляторы примерно на 20 ампер. Думаю, что вам будет интересно посчитать самим и понять, что будет с полётным временем и другими параметрами, если довесить на готовый аппарат 200 граммовый комплект FPV: видеопередатчик, с антенной и бортовой 2S-3S батареей. Скажу сразу, в среднем время полёта сократится на 5-7 минут. А вот 200 грамм для гексакоптера уже не так значительны. К тому же, многие задаются вопросом, есть ли в этом смысл, или даже устраивают дорогостоящие бессмысленные эксперименты без расчетов, по установке двух не оригинальных батарей большей ёмкости под лучи «фантома» вместо одной оригинальной. Смысла в этом совершенно нет, так как запас грузоподъемности у таких аппаратов очень мал. Теперь, понимая, как пользоваться калькулятором, советую вам посчитать самостоятельно.

Надеюсь, что моя статья будет для вас полезной. К вопросу о покупке деталей и запчастей для сборки, я пользуюсь известными всем иностранными торговыми площадками ebay и aliexpress, hbbyking и подобными.

Как собрать дрон своими руками ?

Сборка квадрокоптера своими руками — это увлекательный процесс, который позволяет не только сэкономить деньги, но и получить уникальный опыт, а также создать дрон, полностью соответствующий вашим требованиям. В этой статье мы подробно расскажем, как собрать квадрокоптер с нуля, какие компоненты вам понадобятся и на что обратить внимание.
Почему стоит собрать квадрокоптер самостоятельно?
- Экономия средств: Сборка дрона своими руками часто обходится дешевле, чем покупка готового устройства.
- Гибкость: Вы можете выбрать компоненты, которые подходят именно для ваших задач — будь то съемка, гонки или просто хобби.
- Опыт: Процесс сборки поможет вам лучше понять, как устроен квадрокоптер, что пригодится для его дальнейшего обслуживания и ремонта.
Как собрать дрон своими руками ? Что потребуется ?
Для сборки квадрокоптера вам потребуются следующие основные компоненты:
- Рама
Рама — это основа дрона. Она должна быть прочной, но легкой. Вы можете выбрать готовую раму или изготовить ее самостоятельно из карбона или алюминия. - Моторы и пропеллеры
Для квадрокоптера потребуется четыре бесколлекторных мотора. Их мощность должна соответствовать весу дрона. Пропеллеры выбираются в зависимости от размеров моторов и задач дрона. - Регуляторы скорости (ESC)
ESC управляют скоростью вращения моторов. Они должны быть совместимы с выбранными моторами и поддерживать необходимый ток. Бывают 4 в 1, а так же независимые под каждый мотор. - Полетный контроллер
Это “мозг” квадрокоптера, который отвечает за стабилизацию и управление. Популярные модели: Pixhawk, Matek, SpeedyBee. - Аккумулятор
Литий-полимерные (LiPo) аккумуляторы — самый распространенный выбор для квадрокоптеров. Убедитесь, что аккумулятор обеспечивает достаточное время полета и совместим с другими компонентами. - Приемник и передатчик (пульт управления)
Пульт управления позволяет вам управлять дроном. Выберите модель с достаточным количеством каналов и хорошим диапазоном. - Камера и подвес (опционально)
Если вы планируете снимать видео, вам понадобится камера и стабилизирующий подвес. - Дополнительные компоненты
- Провода, разъемы, крепежные элементы.
- Светодиоды для навигации.
- Защита для пропеллеров (если дрон предназначен для новичков).
Пошаговая инструкция по сборке квадрокоптера
- Подготовка рамы
Соберите раму, следуя инструкции производителя. Убедитесь, что все крепления надежны, а конструкция сбалансирована. - Установка моторов и пропеллеров
Закрепите моторы на лучах рамы. Убедитесь, что они установлены правильно: два мотора должны вращаться по часовой стрелке, а два — против. - Подключение регуляторов скорости (ESC)
Подключите ESC к моторам и полетному контроллеру. Убедитесь, что провода подключены правильно, чтобы избежать короткого замыкания. - Установка полетного контроллера
Закрепите полетный контроллер в центре рамы и подключите его к ESC, приемнику и другим компонентам. - Подключение аккумулятора
Подключите аккумулятор к распределительной плате или напрямую к ESC. Убедитесь, что полярность соблюдена. - Настройка и калибровка
После сборки подключите дрон к компьютеру и настройте полетный контроллер с помощью специального ПО (например, Betaflight или Cleanflight). Проведите калибровку моторов, гироскопа и пульта управления. - Тестовый полет
Перед полноценным использованием проведите тестовый полет в безопасном месте. Убедитесь, что дрон стабильно взлетает, зависает и реагирует на команды.
Советы для успешной сборки
- Внимательно изучите документацию к каждому компоненту.
- Используйте качественные паяльники и инструменты для соединения проводов.
- Проверяйте совместимость компонентов перед покупкой.
- Не торопитесь — сборка требует аккуратности и внимания к деталям.
Если сборка кажется сложной…
Собрать квадрокоптер своими руками — это интересно, но не всегда просто. Если у вас нет времени, опыта или желания разбираться во всех тонкостях, вы можете обратиться в нашу компанию. Мы поможем:
- Подобрать компоненты для вашего дрона.
- Собрать и настроить квадрокоптер под ваши задачи.
- Обучить вас управлению и обслуживанию дрона.
Хотите собрать квадрокоптер мечты?
Свяжитесь с нами уже сегодня!
📞 Телефон: +79887629240
🌐 Telegram: @wideparo
📍 Адрес: Краснодарский край, г.Новороссийск, ул.Анапское ш., д.10
Решили собрать квадрокоптер? Для вас это темная чаща? Не знаете за что взяться? Статья именно для вас. Составлена на личном опыте.
Часть 2
Заинтересовали квадрокоптеры. Решил сделать заказ, выбор пал на хабсан х4 c камерой 0.3мр.
Дождался, получил.Достаточно много отлетал на нём(были краши, долгие ожидания запчастей и ремонты). Мой мозг посетила идея собрать большой квадрокоптер, окунулся в эту тему, перечитал много статей. По возможности отвечал на вопросы людей, состоящих в группе Rc моделистов: по поводу выбора деталей, сборки квадрокоптера. Из всего этого возникла идея написать сию статью.
Принцип полёта
Итак, Если вы решили собрать свой квадрокоптер, то вам необходимо определиться с бюджетом. От суммы, которую вы готовы потратить на это Чудо, зависит размер. Наиболее частые размеры(в мм.) это 250,330,450,550 и больше.
*250 размер: маленький, легкий, чаще все используют только для FPV полётов.
*330 и 450 золотая середина для бюджетного квадрокоптера. Приемлемая масса и цена сборки.
*550 и больше можно отнести к профессиональным коптерам или мультироторам. Такие машины получатся тяжелыми и дорогостоящими. Для данных ЛА будут мощные двигатели и они могут таскать приличный вес, вплоть до килограммовых зеркалок.
Своё повествование я продолжу опираясь на коптер 450 масштаба.
Особое место в данной категории занимают рамы DJI 330 и 450, TBS Discovery.

Цена их соответствующая…высокая.
Есть множество клонов, его я и выбрал.

gearbest.com/rc-parts/pp_88914.html
Настало время выяснить,что же такое квадрокоптер и из чего он состоит.
1. Рама
2. Приёмник/Передатчик
3. Контроллер полёта:
a) AIOP
b) NAZA
c) MuliWii
d) HKPilot
е) AMP
f) И другие
4. Силовая установка
a) Мотор
b) Регулятор скорости
c) Пропеллеры
5. Аккумулятор
6. Доп. Оборудование:
a) FPV система (вид от первого лица в реальном времени)
• Курсовая камера
• Передатчик
• OSD
b) Подвес для бортовой камеры
c) Подсветка
Теперь можно все детально рассмотреть.
1) С рамой уже определились. 450 масштаб, клон TBS.

2) Приёмник/Передатчик. Выбор его имеет очень важное значение. Вам нужно для себя понять: как далеко вы хотите летать.
Самые популярные варианты:
1,5-2км обеспечит 2,4Ггц
433 мгц обеспечит около 5-10км(все зависит от мощности, можно улететь и на 20км)
Для себя выбрал 2,4Ггц FlySky Th9x 9каналов

Ссылка
Не дорогая и простая в настройке аппаратура.
Для квадрокоптера необходимо от 5 каналов.
Выбор данной аппаратуры обусловлен её популярностью, давностью на рынке.Существует множество клонов.Ведётся много споров по поводу того, какая фирма была первой, это та же тургига 9, авионикс и другие… В интернете множество настроек.
3) Контроллер полёта
На данный момент очень много контроллеров полёта для квадрокоптеров. Свой выбор я сделал. Это Naza Lite c GPS
banggood.com/ru/DJI-NAZA-Flight-Control-System-and-GPS-Lite-Version-p-906572.html
Не очень дорого и сердито. Наза требует минимальной настройки и сделать это очень просто.
С контроллерами AIOP, Crius и MultiWii будет много раз сложнее и особенно новичку.
Почему я взял контроллер с GPS?
Данная функция необходима для зависания в точке и возврата домой.
Я вижу это очень удобным функционалом.
4) Силовая установка
Вызывает множество вопросов у непосвященных.
Используются БК моторы. Они являются трёх фазными(3 провода), их КПД около 90%.
Для управления скоростью вращения таким мотором используется регулятор оборотов(регуль), который получает команды от контроллера полёта.
Рассмотрим рамы 330,450мм. В зависимости от ваших потребностей необходимо прикинуть вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно чтобы тяга моторов была в 2-2,5 раза больше общей массы. Это говорит о том, что тяга должна быть 2-3 кг. Делим это на 4 и получаем тягу одного мотора: примерно 500-750 гр.
Возникает вопрос: какой двигатель выбрать? Смотрим в характеристики рамы: нас интересует какие двигатели можно в неё поставить. Должны интересовать первые 2 цифры: 22 или 28 в большинстве случаев.
Начинаем выбор двигателя. У названия двигателя вы увидите некую величину, например: 1100kv. Это величина обозначает количество оборотов на 1 вольт. Двигатели с высокими значениями kv имеют меньше витков обмотки статора, чем менее оборотистые.Из этого вытекает, что максимальная сила тока будет выше в двигателях с меньшим kv, которые имеют большую силу крутящего момента и это позволяет использовать большие пропеллеры.
Можно сравнить с коробкой передач автомобиля. 380kv и 1400kv это как первая и третья передача у авто.
380kv для размеренных медленных и долгих полётов с большой грузоподъемностью
1400kv для быстрого и маневренного хода.
В просторах интернета или же в описании этого двигателя можно увидеть его технические характеристики и результаты тестов. Нужно узнать максимальную силу тока (А) которую сможет потянуть двигатель и исходя их этих данных подобрать регулятор оборотов(ESC). Допустим max А для двигателя 20А. Тогда, ESC берём на 20-25% мощнее, 25-30А.
Теперь смотрим результаты тестов.
Например видим: 11х4.7 –3S-12А – 830гр
Это означает
11х4.7 — характеристики пропеллера(11-дюймы, 4.7 шаг )
3S — число банок LiPo батареи
12А — сила тока в цепи при данной нагрузке
830гр – тяга двигателя при даных условиях
Таким образом, максимальная тяга 830х4=3300 гр., max сила тока в цепи 12х4=48А
Максимальная сила тока нужна для подбора Аккума и Проводки.
Для начала не берите карбоновые пропы. Переплата. Учитесь летать на дешевых.
Крепление пропеллера зависит от самого двигателя. Большинство пропеллеров имеют адаптер под ось двигателя. Возможно крепление на Цангах или же резьбой. Есть прекрасные варианты самозатягивающиеся-крепления у DJI, при таком варианте ваш пропеллер никогда не открутится во время полёта.
Для более простых вариантов советую дополнительно закрепить герметиком для резьбы.
Обращаю внимание: сравнивать моторы с разным kv можно при условиях одного типоразмера. Например, EMAX XA 2212 существуют в разных конфигурациях:
820
980
1400
Их можно сравнить.
Эффективность мотора с 1400kv будет максимальной при использовании пропеллера 8040,
А мотора с 820kv — при пропеллере 1147.
Максимум крутящего момента будет у мотора с 820kv, поэтому целесообразно использовать большие пропеллеры. А мотор с 1400kv будет любить высокие обороты при меньшей нагрузке.
Разница между представленными моторами в обмотке.
Разумно их использовать так:
1400kv на раме 330 и пропеллерами 8040
980kv на раме 450 и пропеллерами 1045
820kv на раме 500-550 и пропеллерами 1147
Я выбрал gearbest.com/rc-quadcopters-parts/pp_154973.html
И пропеллеры gearbest.com/rc-parts/pp_109432.html
Замечательный набор.
Схема подключения
Для простоты: Сигнальный- черный, Силовой(+\-) — красный
5) Аккумулятор
Выбирая аккум необходимо подобрать токоотдачу. Это число С.(25С,35С)
Не забываем что, по нашим данным система кушает 48А.
Допустим что, есть аккум 3300mAh 3S 35C Lipo Pack
3300 mAh — ёмкость аккума
3S – число банок(одна банка 3,7v)
35C – токоотдача. Т.е. Аккум ёмкостью 3.3Ah(3300 mAh) х 35C = 115А
Что достаточно покрывает наше энергопотребление. Даже излишне. Чем больше С, тем тяжелее и дороже аккум.
Посмотрим сможет ли аккум такой же ёмкости, но с токоотдачей 25С справится с нашими задачами или нет: 3.3Ah(3300 mAh) х 25C = 82А
Ответ:да.
Такой аккум будет легче и дешевле.
Для контроля состояния батареи можно купить такую штуку.
gearbest.com/rc-quadcopters-parts/pp_137605.html
Для зарядки аккумов очень популярна Imax B6, будьте осторожны, очень много подделок.
gearbest.com/rc-parts/pp_27704.html
И не забывайте с LiPo надо очень осторожно обращаться.
Мой совет: берите не меньше пары аккумов.
6) Доп. Оборудование.
• Когда вы определились с дальностью полёт и выбрали систему управления, можно начинать выбор FPV системы:
FPV- дословно: вид от первого лица в реальном времени.
2,4Ггц совместима с 5,8Ггц
433Мгц совместима с 1,2 Ггц
Иначе будут создаваться совместные помехи.
Для своей 2.4Ггц я подобрал 5,8Ггц 200mw
gearbest.com/rc-parts/pp_27971.html
FPV-система стостоит из:
1) Курсовой камеры
2) Передатчика на квадрике
3) Приёмной станции на земле.
Для Увеличения дальности связи можно заменить стандартные антены на »клеверы»
gearbest.com/rc-parts/pp_69370.html
Большая часть передатчиков питается в пределах 9-12v, небольшая 3S батарея сможет запитать передатчик и камеру, которая выбирается для данного вольтажа.
Что значит 200mw?
Это мощность передатчика. Она непосредственно влияет на дальность связи. На открытой местности с нештатными антенами сигнал можно получать на расстоянии до 1 км.
С учетом того, что моя система управления на расстояние больше 1,5-2км не способна, это идеальный
вариант для моих потребностей.
С выбором приёмника и передатчика теперь все понятно, а как выбрать камеру, их огромное колличество?
Выбор камеры первоначально упирается в денежные средства.
Есть камеры которые имеют функцию потоковой передачи данных и одновременной записи.Стоимость таких камер значительно выше. Очень популярной является камера мобиус.
gearbest.com/car-dvr/pp_145224.html
Появился её конкурент, тоже имеющий AV выход
gearbest.com/action-cameras/pp_143378.html
Можно использовать курсовую камеру из самых дешовых, без корпуса. Стоимость которой колеблется от 600 до 1000рублей, а записывать с помощью хорошей экшен камеры на подвесе.
У FPV камеры мы увидим число ТВЛ. Что это такое? Это число строк развертки. Для FPV камеры будет достаточно 500-700ТВЛ. Важное значение имеет уровень минимальной освещенности, данный параметр измеряется в люксах. 0.01 люкс достаточно для полётов даже вечером. Угол обзора имеет не менее важное значение. 100-120 градусов это идеально. Не плохо бы иметь автоматическую коррекцию засветов и авто. баланс белого.
Картинку можно вывести на такой монитор
gearbest.com/rc-parts/pp_117460.html
• Можно прикупить 2х- или 3х-осевой подвес для камеры. Такая штука позволяет поворачивать камеру и иметь более стабильную картинку, без рывков и дерганий.
Штука достаточно дорогая.
У меня вот такой: gearbest.com/rc-parts/pp_110479.html
• Естественно сама бортовая камера gearbest.com/action-cameras/pp_77094.html
• Можно установить LED подсветку, пищалку,GPS-трэкер
Как вы поняли, что бы собрать такой БПЛА необходимо не мало вложений.
Цена приблизительно в пределах 400-500 долларов.
Этот обзор предназначен для новичков и несет в себе теорию, в скором времени будет продолжение.Со сборкой и настройкой.
Я запланировал цикл статей и буду не спеша их реализовывать.
Буду рад критике,спасибо за просмотр.
Вскрою карты: конечный результат

Как такую штуку собрать и поднять в небо?
Инструкция будет в следующей части)
Вот небольшой ролик из первых полётов с подвесом.
P.S Покупалось все на личные средства.