
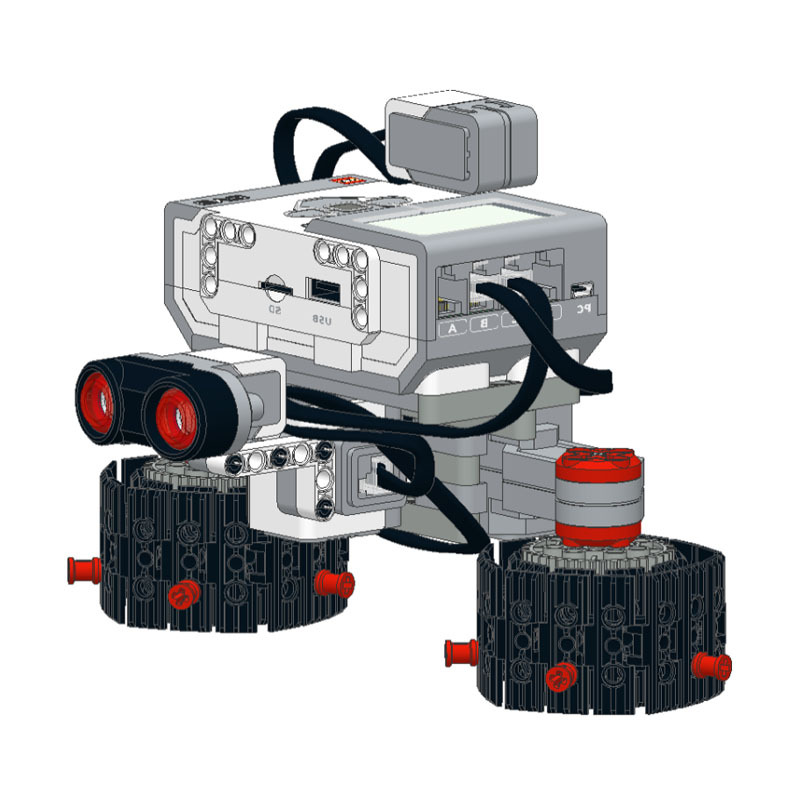
Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.
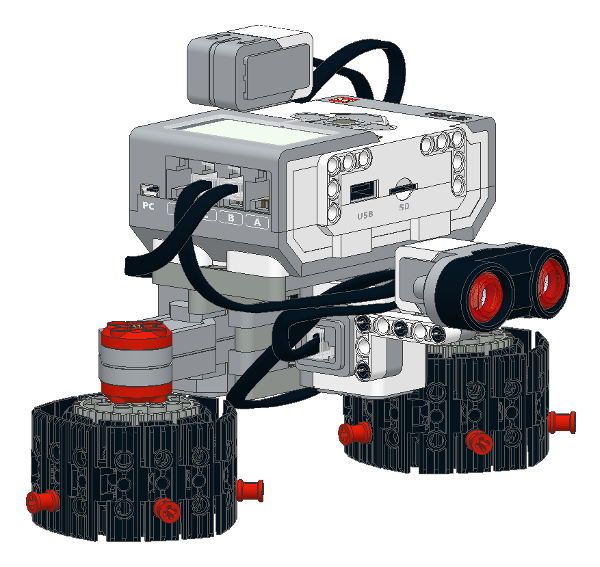
Конструкция робота простая и собрать его можно очень быстро. Инструкцию для сборки вы можете найти ниже. Я использовал набор LEGO Mindstorms Education EV3 (45544), при большом желании можно сделать аналогичного робота из домашней версии (31313), но тогда нужно будет менять программу.
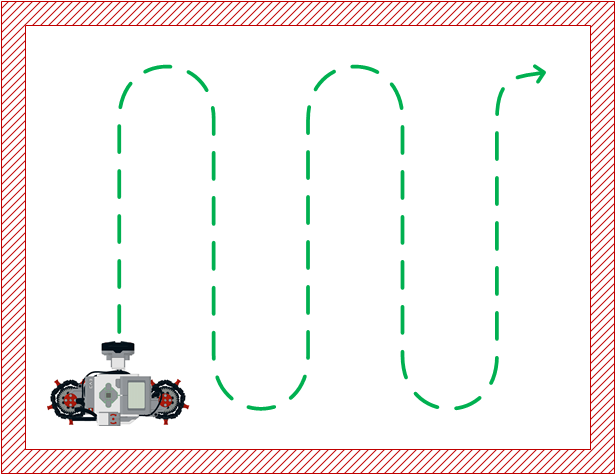
Чтобы робот помыл пол, написана простая демонстрационная программа. Программа рассчитана на то, что помещение будет прямоугольное. Робота нужно расположить в углу комнаты, чтобы рядом слева была стенка. После этого программу можно запускать. Ниже на схеме показано как двигается робот.
К сожалению, стандартный гироскоп LEGO не очень точно измеряет угол поворота и робот может постепенно уходить с прямой линии, поэтому лучше, если помещение будет поменьше. А ещё лучше использовать более точный гироскоп стороннего производителя.
А вот видео, где вы сможете оценить, как двигается робот:
Файлы:
-
Описание
-
Отзывы (0)
Описание
Инструкция по сборке Lego EV3 «Мойщик пола». Формат инструкции PDF
Отзывы
Отзывов пока нет.
Будьте первым, кто оставил отзыв на “Робот уборщик Lego EV3 Инструкция”
Ваш адрес email не будет опубликован. Обязательные поля помечены *
Ваша оценка *
Ваш отзыв *
Имя *
Email *
Сохранить моё имя, email и адрес сайта в этом браузере для последующих моих комментариев.
2025-04-25 00:00
Инструкции Lego EV3
Скачать инструкцию
Автор: Веричева Диана Евгеньевна
Организация: НТГСПИ
Населенный пункт: Свердловская область, г. Нижний Тагил
Аннотация: этот мастер-класс познакомит вас с процессом создания простого робота-уборщика, используя конструктор LEGO Mindstorms EV3. Мы сосредоточимся на основных принципах робототехники и программирования, необходимых для реализации данной задачи. Этот проект подходит как для новичков, так и для тех, кто уже знаком с EV3.
Ключевые слова: робот уборщик, лего, робототехника, прототип, макет.
В настоящее время в содержание школьной учебной программы 7-9 классов входит робототехника. Это сделано для решения проблемы по подготовке кадров по данной отросли. Согласно образовательной программе, учащиеся должны:
Знать:
– особенности механической составляющей конструкций мобильных роботов;
– назначение и принципы работы центрального управляющего блока и электромеханических приводов;
– назначение и принципы работы датчиков мобильных роботов;
– основные принципы программирования мобильных роботов;
Уметь:
– осуществлять сборку конструкций мобильных роботов по заданным функциональным требованиям;
– составлять алгоритмы и реализовывать на их основе программы в среде программирования NXT-G;
– осуществлять оптимизацию созданных конструкций, алгоритмов и программ
Ведь именно они открывают новые возможности для создания новых и не повторимы роботов, повышают уровень вовлеченности учащихся и развивают ключевые навыки XXI века.
Материалы для мастер-класса:
-
-
- Набор LEGO Mindstorms EV3 (базовый набор достаточно)
- Дополнительные кубики LEGO (для корпуса и манипулятора)
- Плоская поверхность для тестирования робота
-
Этап 1: Теоретические основы
Для начала объясним обучающимся технику безопасности и вводим основную теорию по робототехнике. Рассмотрим краткий перечень основных детали в образовательной робототехнике:
- Программный блок EV3 (EV3 Brick): это «мозг» робота. Он обрабатывает программы, управляет моторами и датчиками, и обеспечивает взаимодействие с пользователем через экран и кнопки. Без программного блока робот не будет функционировать. Он содержит процессор, память, порты для подключения датчиков и моторов, а также Bluetooth для беспроводного соединения с компьютером.
-
Датчики:
- Датчик цвета: Этот датчик может определять цвет поверхности, на которую он указывает. Он используется для следования по линиям определенного цвета, сортировки объектов по цвету, распознавания объектов и т.д. Может работать в режимах отраженного света (определяет цвет поверхности) и окружающего света (измеряет интенсивность освещения).
- Датчик касания: простой датчик, который срабатывает при нажатии. Он используется для обнаружения столкновений, активации действий по команде «нажать кнопку», создания простых переключателей и т.д. Он имеет всего два состояния: нажато/не нажато.
- Удаленный инфракрасный датчик (IR Seeker): этот датчик обнаруживает сигналы от пульта дистанционного управления (IR Beacon) и определяет направление и расстояние до него. Он используется для дистанционного управления роботом, следования за объектом, ориентации в пространстве.
- ИК-датчик (Infrared Sensor): позволяет роботу обнаруживать объекты, отражающие инфракрасный свет, на относительно небольшом расстоянии. Он менее точен, чем IR Seeker, и обычно используется для обнаружения препятствий или приближения к объекту на коротком расстоянии.
-
Моторы:
- Большой мотор (Large Motor): cамый мощный из доступных моторов EV3. Он используется для привода колес робота, подъема тяжелых грузов, вращения больших механизмов и выполнения других задач, требующих значительного крутящего момента.
- Средний мотор (Medium Motor): менее мощный, чем большой мотор, но более компактный. Он подходит для задач, где требуется меньший крутящий момент, например, для поворота манипулятора, вращения небольших механизмов или работы с мелкими деталями. [2]
Этап 2: Создание(сборка) робота
- Шасси: Создайте прочное шасси с помощью больших колес EV3. Используйте два больших мотора для привода колес. Разместите их симметрично на шасси, обеспечивая достаточный клиренс для манёвра. Убедитесь, что робот стабилен и легко перемещается. Можно использовать гусеничный ход для лучшего преодоления препятствий, но для начала достаточно колесного.
2. Манипулятор: для сбора объектов потребуется механизм захвата. Простейший вариант – это подвижная «рука» из балок и рычагов, которая будет захватывать предметы. Можно использовать датчик касания для управления захватом.
3. Датчики: для автономной работы роботу необходимы датчики. В этом проекте мы будем использовать:
- Датчик касания: можно использовать для обнаружения столкновений или для активации функции сбора мусора (опционально). Разместите его на передней или боковой части робота.
- Датчик цвета: (по желанию) поможет роботу различать объекты определенного цвета и избегать препятствий определённого цвета.
Этап 3: Программирование робота
Мы будем использовать программное обеспечение LEGO Mindstorms EV3 для написания программы. Программа должна управлять двигателями, обрабатывать данные с датчиков и выполнять действия по уборке. Основные блоки и за что они отвечают:
- Блок «Движение»: для управления двигателями робота.
- Блок «Ультразвуковой датчик»: для измерения расстояния до препятствий.
- Блок «Датчик касания»: для определения столкновений.
- Блок «Цикл»: для создания повторяющихся действий.
- Блок «Условие»: для принятия решений на основе данных датчиков.
Основной алгоритм для программирования робота:
- Движение: Создайте блок движения, который будет перемещать робота вперед. Добавьте блок «цикла» для непрерывного движения.
- Обнаружение препятствий: Используйте датчик касания. Когда датчик обнаруживает препятствие (столкновение), робот должен остановиться, немного повернуться и продолжить движение.
- Захват объектов: при столкновении с объектом (обнаруженном датчиком касания), активируется механизм захвата. После захвата робот может немного отступить, чтобы не застрять.
- Выгрузка объектов: (дополнительная функция) После сбора определенного количества объектов, робот может перемещаться к месту выгрузки.
Добавление функции уборки
- Если у вас есть щетка и контейнер, добавьте в программу блок, который включает мотор щетки, пока робот движется вперед.
- Вы можете добавить дополнительную логику для управления щеткой, например, включать её только при обнаружении мусора с помощью датчика касания или датчика цвета (при наличии).
Пример программы (блок-схема):
Начало
Двигаться вперед
Если Датчик Касания = Включено
Остановиться
Активировать Захват
Отступить
Отпустить Захват
Повернуться
Конец Если
Перейти к началу
Пример схемы:
Фото
Этап 4: Тестирование и доработка
После написания программы протестируйте робота на выбранной поверхности. Оцените эффективность работы манипулятора, надежность обнаружения препятствий и общую управляемость робота. Внесите необходимые изменения в конструкцию и программу для улучшения работы.
Для расширения проекта:
-
-
- Добавление датчика цвета для сортировки объектов по цвету.
- Использование ультразвукового датчика для обнаружения препятствий на расстоянии.
- Создание более сложной программы с использованием условий и вложенных циклов.
- Разработка системы навигации для более эффективной уборки.
-
Использование мастер-классов по созданию роботов в образовательной программе – это перспективное направление, которое позволяет сделать обучение более интересным, практичным и доступным.
Создание и программирование роботов предоставляет новые возможности для образовательной робототехники, повышая ее понятность, увлекательность и практическую ценность. Она позволяет учащимся развить востребованные навыки XXI века, способствует индивидуализации обучения и делает процесс обучения более эффективным.
Список использованной литературы
- Ганин, Е. А. Основы робототехники : учебное пособие / Е. А. Ганин. — Чита : ЗабГУ, 2021. — 157 с. — ISBN 978-5-9293-2853-4. — Текст : электронный // Лань : электронно-библиотечная система. — URL: https://e.lanbook.com/book/271652 (дата обращения: 01.11.2024). — Режим доступа: для авториз. пользователей.
- Дахин, Д. В. Образовательная робототехника : учебно-методическое пособие / Д. В. Дахин, О. О. Бобков. — Воронеж : ВГПУ, 2022. — 88 с. — Текст : электронный // Лань : электронно-библиотечная система. — URL: https://e.lanbook.com/book/317681 (дата обращения: 01.11.2024). — Режим доступа: для авториз. пользователей.
- Основы робототехники : учебно-методическое пособие / составитель Д. М. Гребнева. — Нижний Тагил : НТГСПИ, 2017. — 108 с. — ISBN 987-5-8299-0354-1. — Текст : электронный // Лань : электронно-библиотечная система. — URL: https://e.lanbook.com/book/177538 (дата обращения: 01.11.2024). — Режим доступа: для авториз. пользователей.
Приложения:
- file0.docx (25,6 КБ)
Опубликовано: 11.11.2024
Всего 51 инструкция.
R2D2
Боевая тележка
Бульдозер
Быстро-бот
Валли
Вентилятор
ГироБой
Горилла
Грузовик
Гусеничная тележка
Динозавр
Захват
Знеп
Игровая машина
Игровая машина
Комар
Конвейер для шариков
Луноход
Манипулятор
Манипулятор-рука
Наклонная тележка
Погрузчик
Ползающий робот
Принтер
Пульт управления
Распознаватель цветов
Рисующая рука
Рисующий робот
Робот с захватом
Робот с клешнями
Робот Сторм
Робот, поднимающийся по лестнице
Рыбка-ангел
Скорпион
Слон
Собака
Сортировщик по цвету
Сортировщик по цвету
Танк
Тележка
Тележка с гироскопом
Тележка с шариковой опорой
Тележка со средним мотором
Тележка+датчик касания
Тележка+датчик расстояния
Тележка+датчик цвета снизу
Тележка+датчик цвета спереди
Фабрика спиннеров
Цветок
Черепаха
Электро-гитара
Вернуться в каталог (всего 137 инструкций).