
3D-принтер Prusa i3 MK3S Kit поставляется в полностью разобранном виде. Тем увлекательнее его сборка, где всё продумано до мелочей, а часть деталей напечатана на таких же принтерах Prusa. Раскладывайте перед собой содержимое коробки, следуйте нашей инструкции, и вы получите готовое к работе устройство!
Если вы хорошо знаете английский — можете воспользоваться официальным мануалом по сборке принтера.
1. Советы по сборке
- Принтер содержит много мелких деталей. Для облегчения сборки производитель распределил их по пакетикам: на каждый этап — своя порция.
- В комплекте есть лист с изображением всех винтов в реальном размере. Если вы не знаете, какой винт использовать, сравните его с изображением на листе.
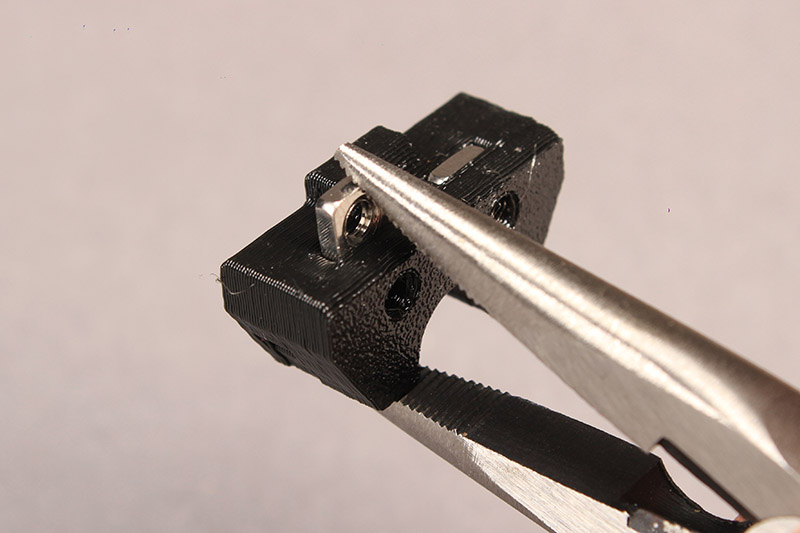
- В процессе сборки гайки кое-где надо будет впрессовывать в посадочные места. Используйте плоскогубцы из комплекта принтера или похожий инструмент.
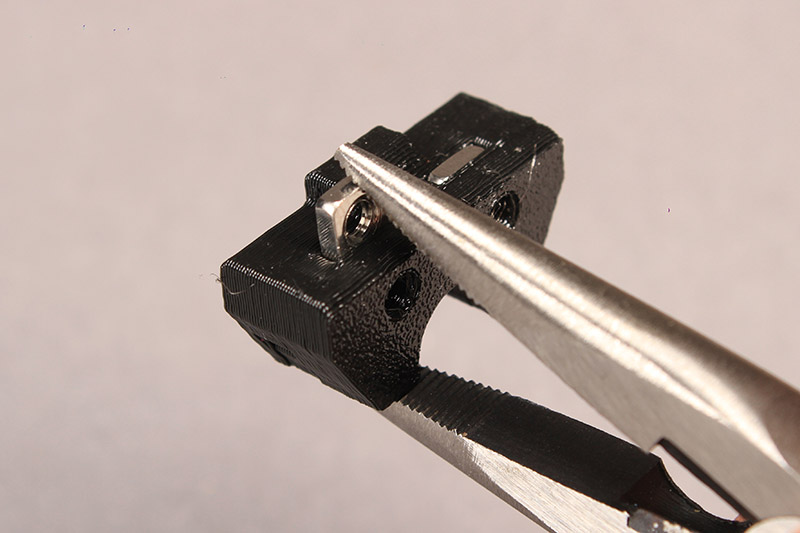
- Если гайку не получается вставить с помощью плоскогубцев, то можно продеть в отверстие винт, наживить гайку и затянуть шестигранником. При этом гайка встанет ровно в посадочное место, а винт достаточно выкрутить обратно.
- Некоторые мелкие пластиковые детали очень легко сломать. Не применяйте силу при сборке! Если всё идёт верно, большие усилия не нужны.
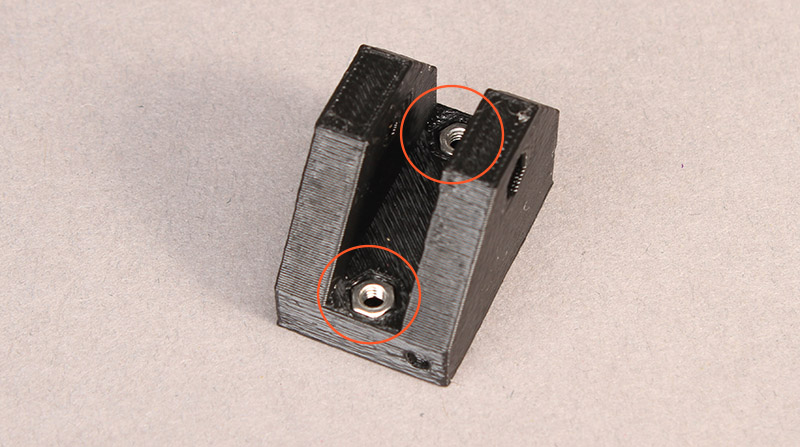
- После того, как установите гайку, обязательно проверьте, нормально ли она встала. Попробуйте вкрутить винт в деталь: если он попадает в резьбу и держится — значит, вы всё установили правильно.
- В комплекте идут два шестигранных ключа для винтов M3. Используйте более длинный ключ в местах, где надо закручивать винты под наклоном. Он имеет прорези на конце, которые позволяют вставлять ключ не только перпендикулярно.
2. Сборка рамы и оси Y
2.1. Сборка нижней части рамы
Что понадобится:
- 1× Алюминиевая рама
- 2× Короткий алюминиевый профиль
- 2× Длинный алюминиевый профиль
- 16× Винт M5×16

Прикрутите два длинных профиля так, чтобы они были с передней стороны рамы, где нанесена надпись Prusa.

Прикрутите два оставшихся профиля с задней стороны рамы, которая без всяких надписей.

Убедитесь, что короткий профиль установлен с задней стороны рамы.

2.2. Сборка передней и задней фрезерованных панелей
Что понадобится:
- 1× Передняя фрезерованная панель
- 1× Задняя фрезерованная панель
- 2× Сухарь для блока питания
- 16× Винты M5×16

Прикрутите переднюю фрезерованную панель к профилю.


Вложите сухари для блока питания в боковой паз левого профиля с обратной стороны принтера. Не перепутайте профиль: вам нужен именно фрагмент слева.

Прикрутите заднюю панель к профилю.


2.3. Крепление ножек и держателей валов
Что понадобится:
- 4× Ножка резиновая
- 4× Держатель вала
- 1× Держатель ремня
- 1× Валик для держателя ремня
- 10× Винт M3×10
- 8× Гайка M3 квадратная
- 2× Гайка M3
- 1× Гайка M3 с прокладкой
- 18× Винт M3×18

Вставьте квадратные гайки в пазы держателей. Убедитесь, что гайки встали туда ровно.

Чтобы установить ножки по краям профиля, вставьте их в паз, а затем поверните.


Прикрутите четыре держателя для валов на переднюю и заднюю пластины. Отверстие держателя должно смотреть от пластины к раме принтера.



Запрессуйте две обычные гайки в держатель ремня.
Вставьте гайку с прокладкой напротив отверстия для винта.

Установите валик для ремня в держатель. Осью у валика должен быть винт. Закрутите, но не затягивайте винт.
Проверьте, вращается ли валик. Если он застопорился, ослабьте винт.

Установите держатель для ремня на переднюю пластину.

2.4. Установка мотора оси Y
Что понадобится:
- 1× Мотор оси Y
- 1× Крепление мотора оси Y
- 2× Гайка M3
- 4× Винт M3×10
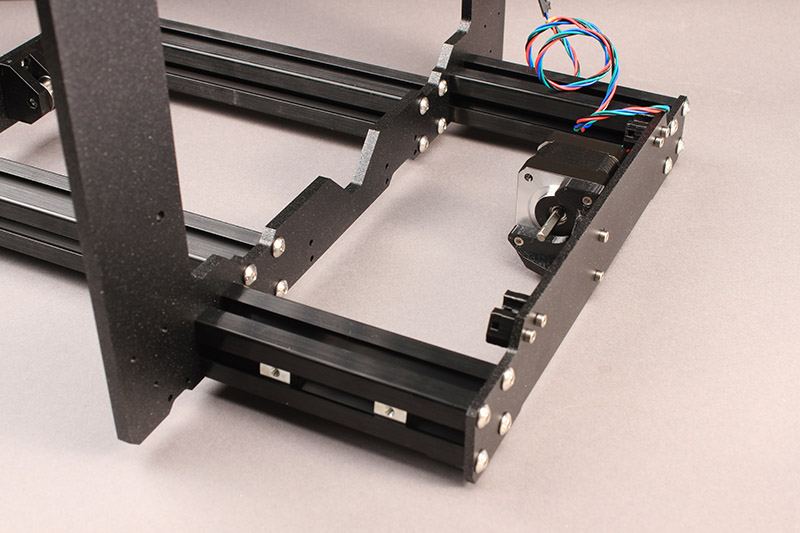
Возьмите мотор именно для оси Y — на нём соответствующая подпись «Y axis». Если взять другой двигатель, то потом не хватит длины провода.

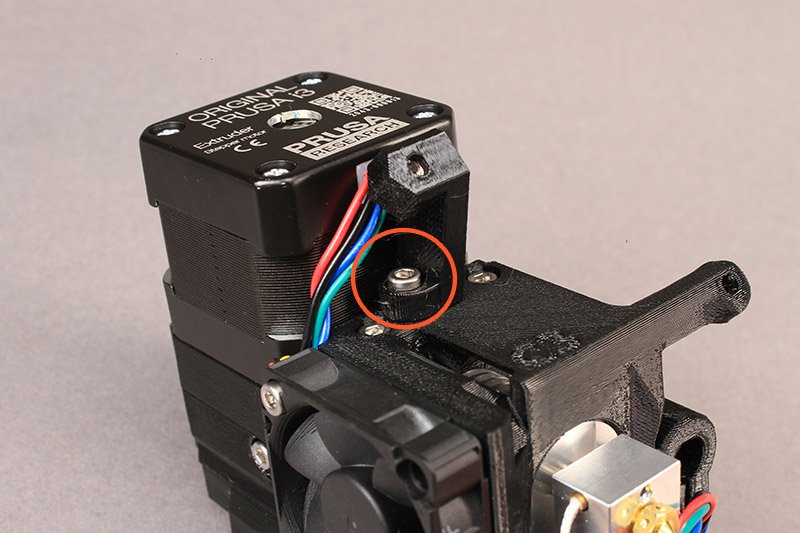
Впрессуйте гайки в специальные посадочные места на держателе мотора.

Прикрутите держатель к мотору. Обратите внимание на положение провода, который выходит из мотора.

Установите двигатель на кронштейне на задней панели принтера. Обратите внимание на положение вала. Он должен смотреть по направлению к держателям блока питания.

2.5. Сборка крепления стола
Что понадобится:
- 3× Линейный подшипник
- 1× Каретка для стола
- 3× Крепление подшипников
- 2× Вал 330 мм (средний по длине)
- 6× Гайка M3 с втулкой

Положите подшипники на их места, затем установите скобы крепления.

Прижмите крепления гайками с обратной стороны. Гайки можно затягивать пассатижами из комплекта. Не перетягивайте крепления! Как только подшипник перестанет болтаться, затяжки достаточно.

Вставьте валы в подшипники.

Установите каретку стола с валами на крепления. Обратите внимание на положение каретки. Вал с двумя подшипниками должен быть слева.

Ослабьте винты держателей валов. Это нужно, чтобы валы были закреплены на раме ровнее.

Пропустите стяжки через отверстия в держателях валов. Замок стяжки должен смотреть внутрь рамы.

Подвигайте каретку стола по оси. Она должна скользить ровно, без лишнего сопротивления.
Теперь затяните винты держателей валов.

2.6. Установка ремня оси Y
Что понадобится:
- 1× Ремень оси Y 650 мм
- 1× Крепление ремня оси Y (большое)
- 1× Крепление ремня оси Y (малое)
- 1× Шкив
- 1× Винт M3×30
- 4× Винт M3×10
- 2× Гайка M3
- 1× Гайка M3 с прокладкой
Установите шкив на мотор. Лыска на валу мотора должна смотреть перпендикулярно одному из прижимных винтов. Шкив должен быть насажен почти до конца, но при этом не мешать вращению оси.
Затяните прижимные винты шкива.
Установите гайки в малое крепление ремня оси Y.
Зажмите винт M3×10 ремнём.

Закрутите винт с ремнём в крепление. Обратите внимание на зубчики ремня: они должны смотреть вверх. Конец ремня не должен торчать наружу, иначе его длины может не хватить.

Прикрутите крепление к нижней части стола через крайнее правое отверстие. Пропустите ремень через шкив мотора.

Установите гайку с прокладкой во второе крепление ремня оси Y.

Прикрутите, но не затягивайте второе крепление. Оно должно немного перемещаться вдоль оси Y.

Натянув ремень, затяните его винтом во втором креплении. Если длины ремня не хватает — ослабьте натяжение, открутив кронштейн мотора или крепление подшипника напротив.
Закрутите винт М3×30 в оба крепления. Этот винт помогает натягивать ось: просто подкрутите его, если ремень ослабнет.
Проверьте, что стол перемещается по оси свободно. Ремень не должен тереться или задевать за боковые части шкива или подшипника.
3. Сборка оси X
3.1. Сборка креплений оси X
Что понадобится:
- 4× Подшипник линейный
- 1× Крепление оси X (большое)
- 1× Крепление оси X (малое)
- 1× Подшипник с корпусом
- 2× Винт M3×18
- 1× Гайка M3 с прокладкой
- 1× Гайка M3 квадратная

Возьмите линейный подшипник и вставьте его до конца паза. Затем установите второй подшипник так, чтобы он не проваливался до первого. Верхняя часть подшипника должна идти вровень с верхом крепления. Подшипник можно вставить только с одной стороны.


Вставьте квадратную гайку в паз. Немного вкрутите в неё винт М3×18.

Установите гайку с прокладкой в паз.
Поместите подшипник в крепление. Просуньте в него винт М3×18. Закрутите, но не затягивайте его. Проверьте, что подшипник нормально вращается.

3.2. Установка валов оси X
Что понадобится:
- 2× Вал 370 мм (самый длинный)
- 1× Мотор оси X
- 3× Линейный подшипник
- 1× Шкив
- 3× Винт M3×18
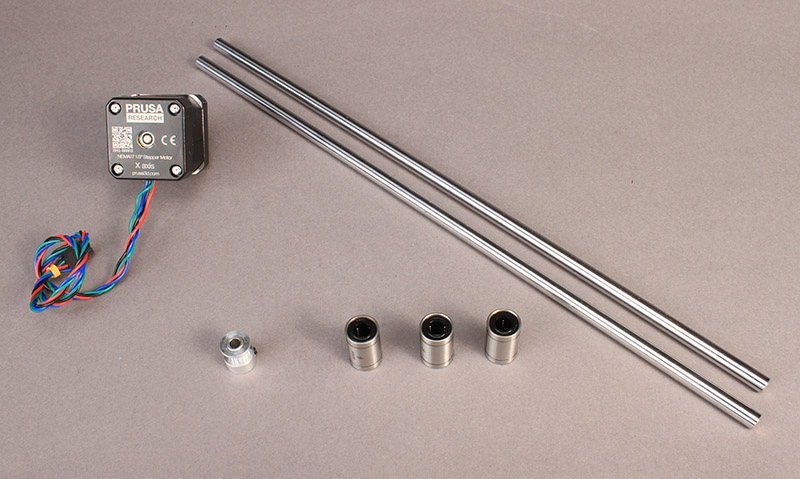
Наденьте два подшипника на вал длиной 370 мм и ещё один подшипник на второй вал.

Аккуратно вставьте валы в крепления, расположив их как на картинке. Внимание: детали на этом этапе очень легко повредить. Вставив вал, попробуйте слегка подвигать его в стороны без лишней силы и давления на ось.
Проверьте через боковые отверстия, вошли ли валы до конца.
Наденьте шкив на вал мотора с маркировкой «X axis». Зубчатая сторона шкива должна смотреть к мотору. Лыска на валу должна быть перпендикулярна одному прижимному винту.

Прикрутите мотор к креплению. Обратите внимание на то, как нужно направить выходные провода. Не затягивайте винты: мотор должен немного двигаться за счёт прорезей в детали.

4. Сборка оси Z
4.1. Установка моторов
Что понадобится:
- 2× Крепление мотора
- 2× Мотор оси Z с гайками
- 2× Защитный колпачок мотора
- 14× Винт M3×10
- 4× Винт M3×18
- 4× Гайка M3
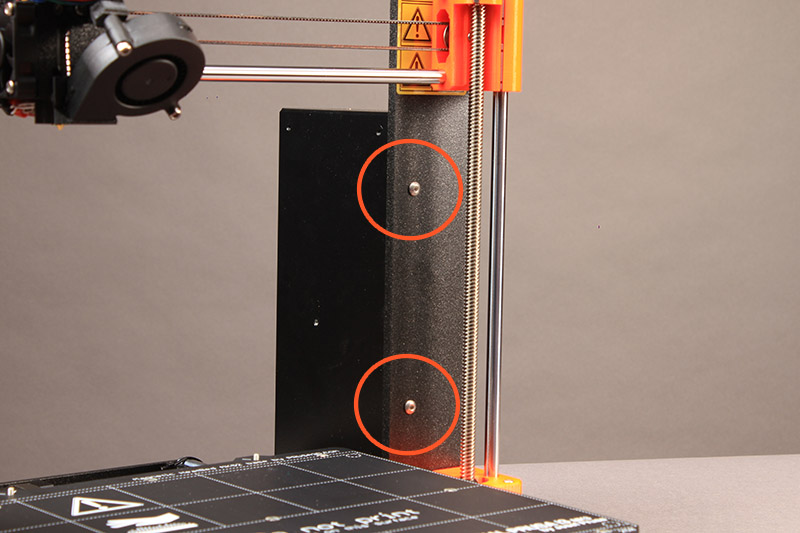
Прикрутите крепления моторов к раме спереди. Обратите внимание на разрез на кронштейне: он должен быть направлен от стола.



Снимите гайки с винтов на моторах оси Z.

Накрутите защитные колпачки на винты до моторов. При этом колпачок не должен упираться в мотор, а вал должен прокручиваться свободно.
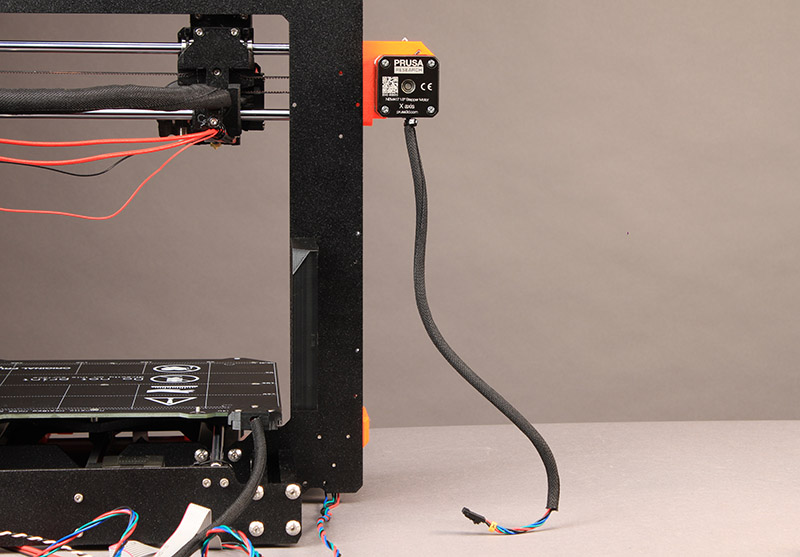
Установите шаговые двигатели в кронштейны. Мотор с более длинным проводом нужно ставить в правое крепление. Провод от мотора прокладывается под раму.

Установите по две гайки в каждый пластиковый держатель валов оси Z.

Установите в крепления металлические гайки и зафиксируйте их винтами M3.

Установите собранную ось на валы. Аккуратно проверните их, чтобы немного наживить гайки.

4.2. Установка кронштейна валов оси Z
Что понадобится:
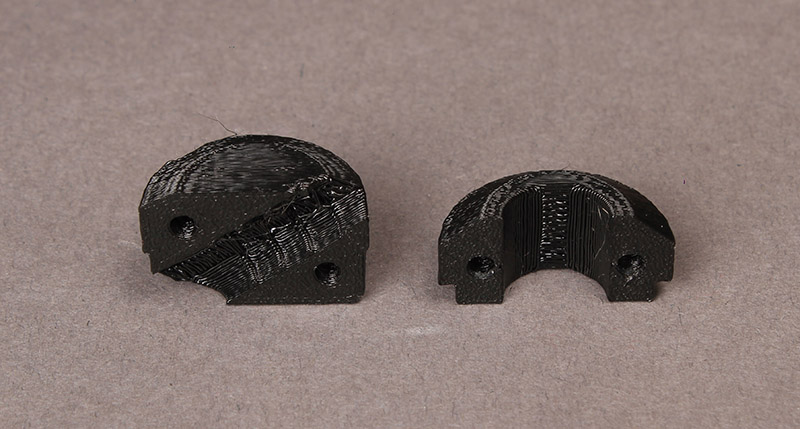
- 2× Крепление валов оси Z
- 4× Винт M3×10
- 2× Вал 320 мм

Вставьте валы через ось X вертикально, чтобы они попали в отверстия в кронштейнах моторов.
Установите и зафиксируйте винтами верхние кронштейны валов оси Z.


5. Сборка экструдера
5.1. Сборка корпуса экструдера
Что понадобится:
- 1× Основная часть корпуса экструдера
- 1× Пластиковая качелька для датчика филамента
- 1× Пластиковое крепление шарика
- 1× Металлический шарик
- 1× Магнит большой
- 1× Магнит малый
- 1× Винт M3×10
- 1× Винт M3×18
- 2× Гайка M3
- 2× Гайка квадратная M3
Установите гайки в их посадочные места. Немного вкрутите винт М3×10 в крепление магнитного стола.

Установите меньший магнит в качельку.

Установите каретку в корпус. Зафиксируйте её винтом М3×18, но не затягивайте до конца, поскольку каретка должна поворачиваться. Установите второй магнит в отверстие в корпусе. Магнит должен быть установлен такой стороной, чтобы магнит в каретке отталкивался. Если каретка притягивается, переверните магнит другим полюсом.
Поместите шарик в отверстие в каретке.

Установите крепление шарика на корпус.

Проверьте, что качелька качается, а шарик свободно перемещается в кронштейне.
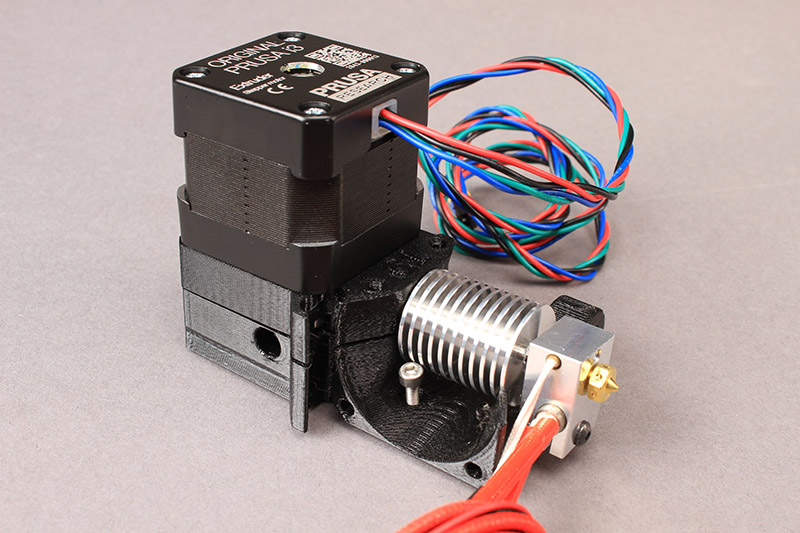
5.2. Подготовка мотора экструдера
Что понадобится:
- 1× Мотор экструдера
- 1× Крепление мотора
- 1× Крепление хотенда
- 1× Шестерёнка для прутка с винтовым креплением
- 1× Шестерёнка для прутка без винта
- 1× Вал для шестерёнок
- 2× Подшипник для шестерёнок
- 2× Винт M3×10
- 1× Гайка M3 квадратная

Установите мотор экструдера в крепление и зафиксируйте его винтами. Обратите внимание на положение провода.

Наденьте шестерёнку на вал мотора и зафиксируйте её винтом. Лыска на валу должна быть напротив фиксирующего винта. Жёлоб для подачи прутка должен находиться напротив отверстия в корпусе, по которому будет идти нить филамента.

Положение шестерёнки можно проверить ключом.

Установите гайку в боковое отверстие.

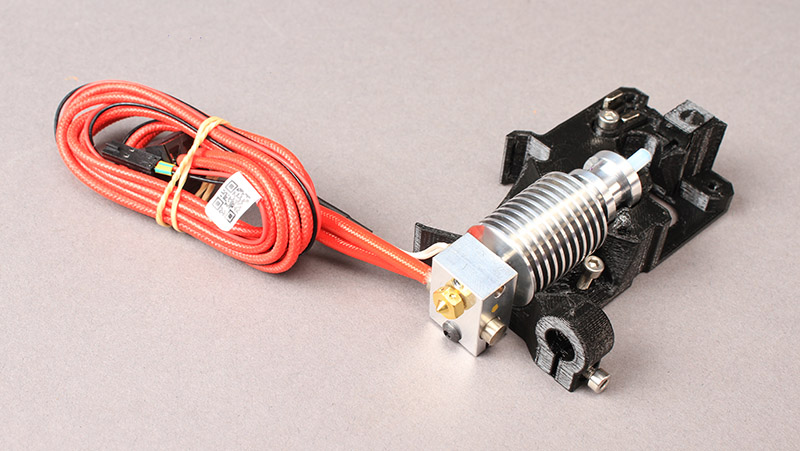
5.3. Подготовка хотенда
Что понадобится:
- 2× Винт M3×40
- 2× Винт M3×10

Вкрутите два винта М3×10 не до конца в корпус. Они должны помогать удерживать хотенд внутри.

Поместите хотенд в углубление для него. Обратите внимание на расположение проводов.
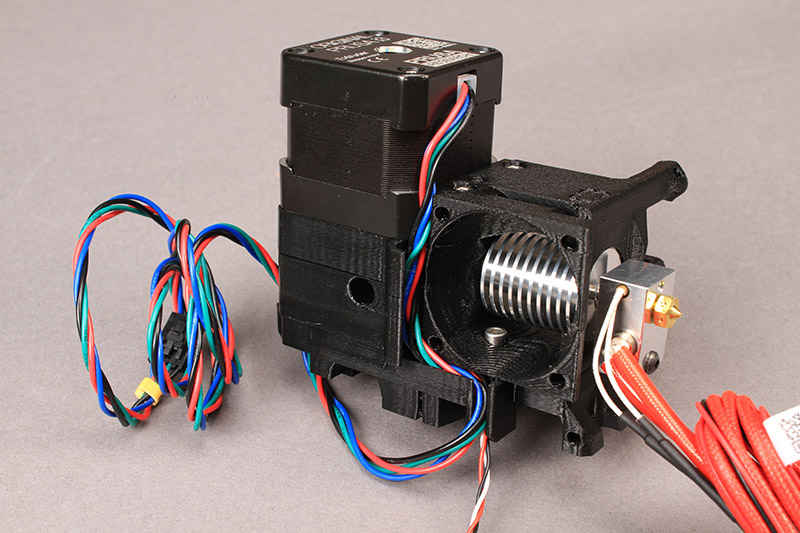
Накройте основную часть мотором экструдера с креплением.
Установите ответную часть крепления хотенда, как указано на фото.

Зафиксируйте крышку двумя винтами M30×40. Закручивайте их очень аккуратно, чтобы не повредить пластиковую деталь.

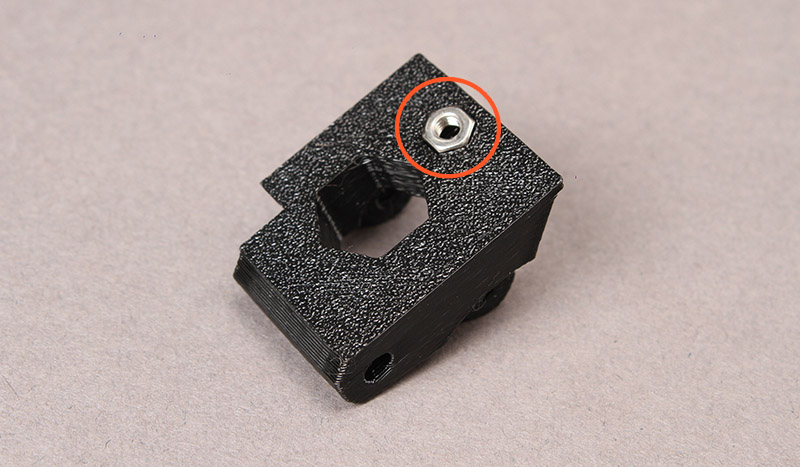
5.4. Установка крепления экструдера к оси
Что понадобится:
- 1× Крепление экструдера к оси X
- 1× Шлейф для датчика филамента
- 2× Гайка М3
- 4× Гайка M3 квадратная

Установите четыре квадратные гайки в отверстия.

Впрессуйте две гайки в их посадочные места.

Проденьте шлейф для датчика филамента в углубление. Оставьте небольшой запас длины сверху.

Поместите провода от мотора экструдера в углубление на корпусе.

Аккуратно совместите обе части. Проследите, чтобы провода оказались в кабель-каналах, а не зажимались между деталями.

Затяните два винта, которые удерживали хотенд.

Подтяните провода в кабель-каналах, чтобы они не торчали наружу.
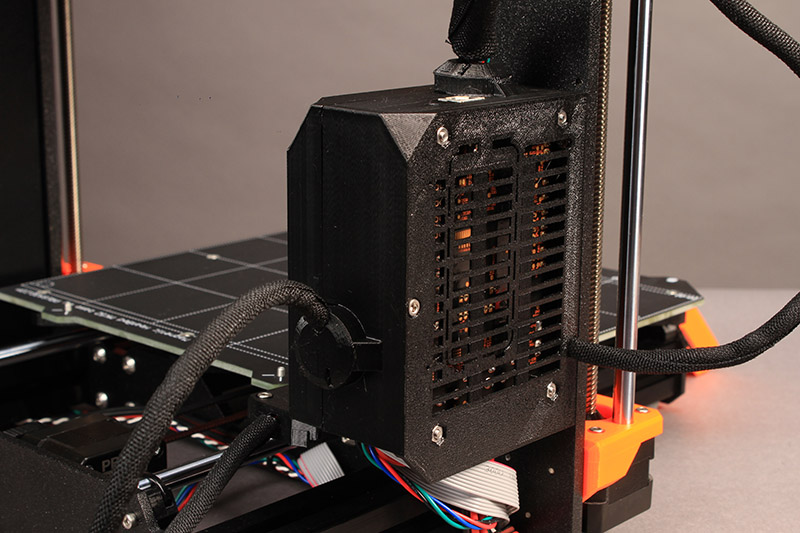
5.5. Установка датчика филамента и вентилятора для радиатора
Что понадобится:
- 1× Датчик филамента
- 1× Вентилятор для радиатора
- 1× Винт M2×8
- 1× Винт M3×40
- 3× Винт M3×14

Установите вентилятор и датчик филамента на экструдер. Обратите внимание на ориентацию проводов. Наклейка на вентиляторе не должна быть видна — то есть, лопасти дуют внутрь.

5.6. Сборка регулятора прижима
Что понадобится:
- 1× Регулятор прижима
- 1× Кронштейн вентилятора обдува сопла
- 1× Крышка датчика филамента
- 1× Вал для шестерёнки
- 1× Подшипник для шестерёнки
- 1× Шестерёнка для прутка без винта
- 1× Вал для шестерёнок
- 1× Пружинка
- 2× Гайка M3
- 2× Винт M3×40
- 2× Винт M3×10

Установите подшипник и вал в шестерёнку.

Впрессуйте гайку в деталь, которая регулирует прижим пластика.
Установите шестерёнку на валу и убедитесь, что она вращается свободно. Обратите внимание на ориентацию зубчиков шестерёнки.

Установите деталь на экструдер. Зафиксируйте её винтом M3×40. Не вкручивайте винт слишком сильно. Деталь должна свободно перемещаться вокруг винта.

Наденьте на винт М3×40 пружинку и вкрутите его через весь экструдер в деталь, которая прижимает филамент. Шляпка винта должна быть примерно вровень с поверхностью стенки.

Закройте крышкой датчик филамента. Зафиксируйте его винтом М3×10.

Впрессуйте гайку в держатель вентилятора обдува.

Закрепите его на экструдере винтом М3×10.
5.7. Установка вентилятора обдува и датчика стола
Что понадобится:
- 1× Вентилятор обдува сопла
- 1× Кожух вентилятора
- 1× Датчик стола
- 1× Гайка M3 квадратная
- 3× Винт M3×20
- 1× Гайка M3

Впрессуйте гайку в отверстие.

Вставьте кожух в специальные пазы на корпусе экструдера.

Установите вентилятор на посадочное место и закрепите двумя винтами М3×20. Если вы по ошибке использовали винты на каком-то другом шаге, возьмите их из запасного пакетика. Не затягивайте винты слишком сильно, иначе можно повредить вентилятор.

Установите датчик стола в зажим. Постарайтесь установить его чуть выше сопла. Сделайте петлю на датчике и пропустите кабель вместе со шлейфом вентилятора через кабель-канал.

Пропустите стяжки через каналы в корпусе. Обратите внимание, как располагаются замки стяжек.
Установите экструдер на ось X. Затяните стяжки.


5.8. Установка ремня
Что понадобится:
- 1× Ремень 850 мм
Зафиксируйте один конец ремня на экструдере.

Пропустите ремень через подшипник и вал мотора.

Ослабьте крепёжные винты мотора.

Зафиксируйте второй конец ремня на экструдере. Обрежьте конец, но не слишком коротко.

Крепко натяните ремень, чтобы он не провисал и не болтался.

Сначала вкрутите винт-натяжитель, пока ремень не будет сильно натянут. Затем затяните крепёжные винты самого мотора.

5.9. Закрепление экструдера на осях
Что понадобится:
- 1× Держатель провода
- 1× Задняя крышка экструдера
- 1× Гайка M3
- 1× Винт M3×40
- 4× Винт M3×10
- 1× Нейлоновый пруток
- 1× Оплётка для проводов 490 мм

Впрессуйте гайку в крышку.

Винтом М3×40 установите держатель на крышку.

Пропустите все провода через отверстие в крышке. Закрепите её винтами М3×10 на экструдере.

Уберите провода в оплётку и закрепите её стяжками. Замки стяжек должны смотреть вверх и вниз, иначе они будут мешать экструдеру в крайних положениях.

6. Установка дисплея
Что понадобится:
- 1× Плата дисплея
- 1× Крепление дисплея (левое)
- 1× Крепление дисплея (правое)
- 1× Колпачок энкодера
- 1× Корпус дисплея
- 6× Винт M3×10
- 4× Гайка M3 квадратная

Установите держатели дисплея на плату. Проверьте, что все шлейфы подключены к плате, а площадки на держателях смотрят в сторону от дисплея.

Вставьте плату дисплея в корпус. Защёлка должна зафиксировать плату, а затем её нужно дополнительно притянуть к корпусу винтами M3×10.

Вперссуйте гайки в отверстия.

Прикрутите дисплей спереди корпуса принтера винтами M3×10.

Наденьте колпачок на энкодер дисплея.

7. Установка стола и блока питания
7.1. Подготовка нагревательного элемента стола
Что понадобится:
- 1× Нагревательный элемент стола
- 1× Провода для стола
- 1× Оплётка для проводов 300 мм
- 1× Крепление для провода (большое)
- 1× Крепление для провода (малое)
- 5× Винт M3×10
- 3× Гайка M3 с втулкой
- 2× Шайба M3
- 9× Распорка 6×6×3
- 9× Винт M3×14 потайной
- 2× Гайка M3

Прикрутите два провода к столу, используя шайбы. Обратите внимание: красный провод должен быть подключён к контакту VCC, а чёрный — к GND.

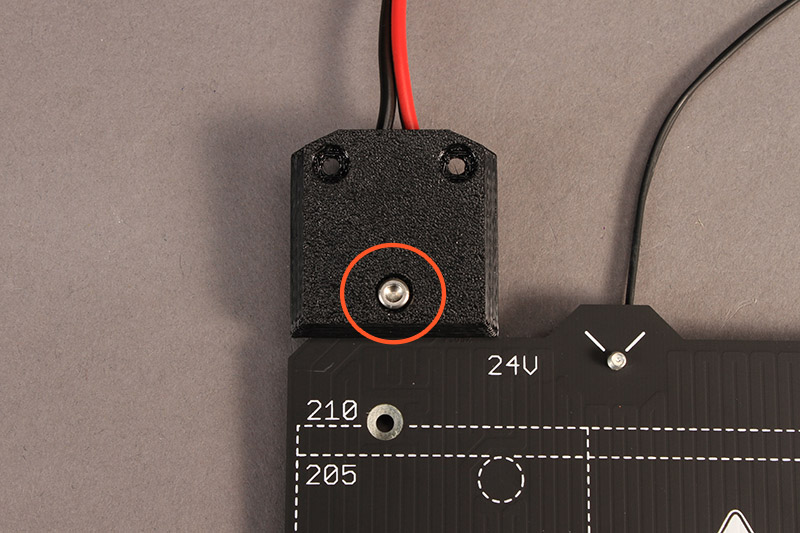
Установите гайки в малую деталь крепления провода к столу.

Возьмите вторую, более крупную деталь и закрепите её к столу сверху, используя винт М3×10 и гайку М3 с втулкой.
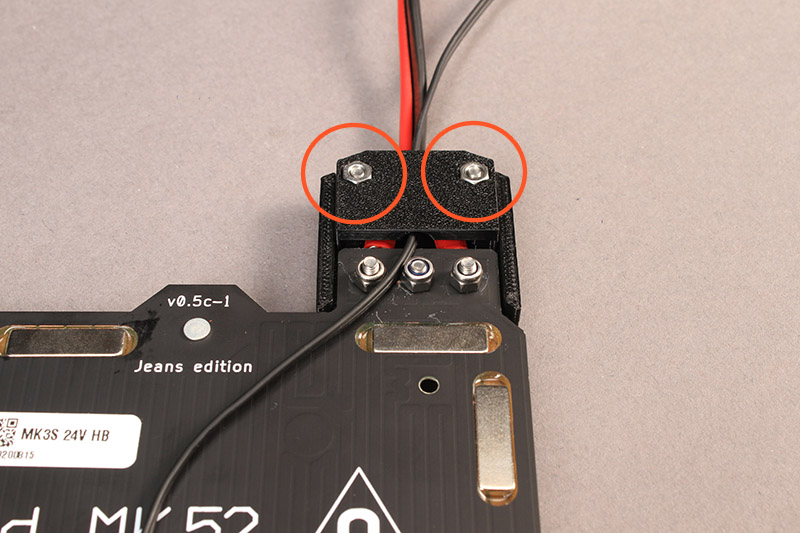
Пропустите провод датчика температуры между деталями крепления. Установите вторую деталь крепления снизу и зафиксируйте её винтами М3.
Наденьте оплётку на провод питания стола и датчика температуры.

Поставьте распорку на центральное отверстие — так будет легче устанавливать стол.

Сначала поместите стол на распорку и заверните, но не затягивайте центральный винт. Затем установите распорки по периметру стола и зафиксируйте их винтами. После установки всех распорок (9 штук) нужно протянуть винты.

7.2. Установка блока питания
Что понадобится:
- 1× Блок питания
- 2× Провода питания
- 1× Провода для детектора отключения питания
- 2× Винт M4×10
- 2× Винт M3×10

Установите два винта M3×10 в держатели блока питания.

Прорезями в нижней части установите блок питания на винты, но пока не закручивайте их.

Подвиньте блок питания вплотную к раме и зафиксируйте его винтами M4×10. Осторожнее, не погните портал.
Подключите провода к клеммникам блока питания и специальному разъёму. Обратите внимание на цвет проводов: к контактам V+ надо подключить красные провода, а к V- чёрные. Теперь закрутите до конца винты М3 снизу блока питания.

8. Сборка электроники
8.1. Установка дверцы
Что понадобится:
- 1× Дверца корпуса электроники
- 1× Петля дверцы нижняя
- 1× Петля дверцы верхняя
- 2× Винт M3×10
- 1× Гайка M3 квадратная

Установите квадратную гайку в отверстие.

Установите меньшую петлю на заднюю сторону платы. Прикрутите петлю к нижнему отверстию.

Установите дверцу и прикрутите верхнюю петлю. Проверьте, что дверца двигается.

Оберните провода мотора оси X в оплётку. Зафиксируйте край стяжкой ближе к мотору.
8.2. Установка платы управления
Что понадобится:
- 1× Плата управления
- 1× Корпус платы управления
- 6× Винт M3×10
- 4× Гайка M3
- 4× Гайка M3 квадратная

Установите квадратные гайки в посадочные места.


Установите плату в корпус и закрепите винтами М3×10.

Наживите винты М3×10 в раму корпуса.

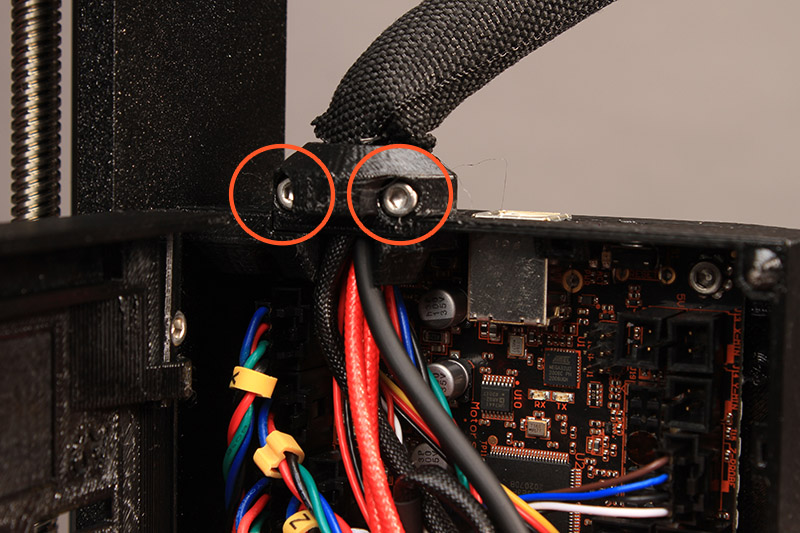
Подключите к плате провод мотора оси X и поместите его в специальный кабель-канал. Затем установите корпус на раму за выемки.

Затяните два винта, которые держат корпус. Используйте длинную сторону шестигранника.


8.3. Кабель-менеджмент
Зафиксируйте стяжкой провода мотора Z.

Зафиксируйте провода блока питания, мотора Z и Y стяжкой в двух местах.

Пропустите два шлейфа от дисплея внутри профиля.

Прежде чем затянуть третью стяжку, просуньте шлейфы дисплея под проводами.

Выведите пучок проводов к блоку электроники.

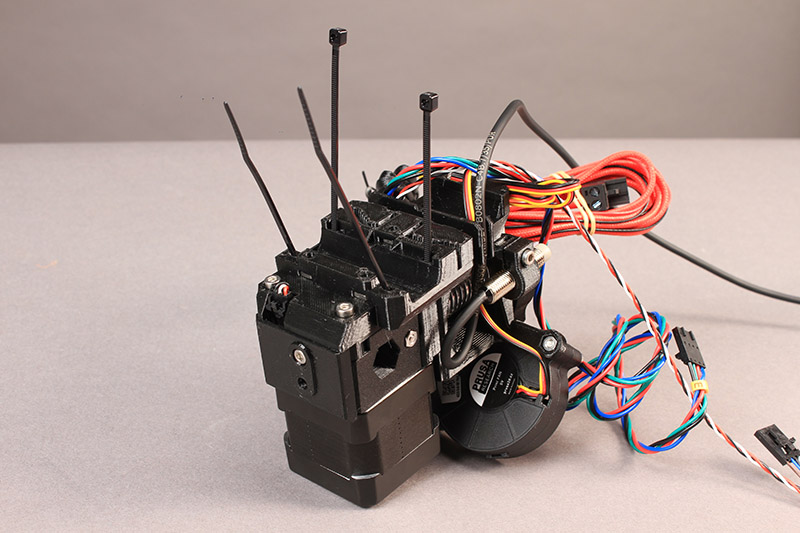
На данном этапе провода должны идти, как показано на фото.

8.4. Сборка кабель-канала
Что понадобится:
- 1× Две части кабель-канала
- 4× Винт M3×10
Установите ответную часть кабель-канала на корпус. Провода стола должны быть пропущены в кабель-канал. Зафиксируйте канал двумя винтами.

Подключите все разъёмы, как показано на схеме. Если у вас останется лишняя длина провода — аккуратно сложите его и стяните стяжкой.


Пучок проводов экструдера тоже зафиксируйте частью кабель-канала.
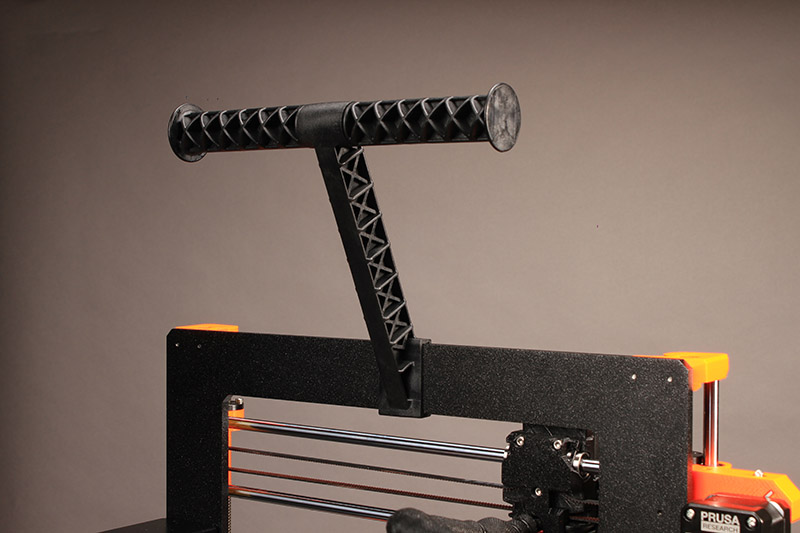
9. Установка аксессуаров
Что понадобится:
- 1× Комплект частей держателя катушек
- 1× Крышка блока питания
- 2× Винт M3×10
- 1× Винт M3×40

Установите крышку снизу блока питания. Зафиксируйте её винтами М3×10.

Закрутите винт, который будет держать крышку. Убедитесь, что вся дополнительная длина проводов аккуратно спрятана внутри кейса.
Соберите и установите T-образный держатель для катушек.
Заключение
На этом сборка 3D-принтера Prusa i3 MK3S Kit окончена. Пора доедать мармеладных мишек Haribo и переходить к первому запуску.
Полезные ссылки
- Всё для 3D-печати в каталоге Амперки
- Где скачать бесплатные 3D-модели
Nioz
Загрузка
26.04.2016
10543
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы
будете
получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Подписаться
13
Прошло уже более полу года как мы разработали свою версию рамы prusa i3 steel. Было внесено множество изменений. Рама до сих пор находится на стадии улучшения. Но к сожалению внятной инструкции сборке нашего пазла до сих пор по не было. Количество владельцев данной рамы растет с каждым днем. Потому мы решили создать публичную инструкцию по сборке. Чертежи рамы к сожалению до сих пор не доступны для свободного скачивания. А инструкцию мы выкладываем на пользу развития проекта Rep-rap, что бы все могли увидеть какие-либо интересные решения для себя.
И так в первую очередь, из чего же состоит рама?
1. Сама рама-несущая на себе все 3 оси перемещения на прецизионных валах 8мм.
2. Каретка У-она же подвижный ‘стол’.
3. Каретка Х- на нее устанавливается экструдер или hotend bowden.
4. Каретка Z-Состоящая из 2х частей-поднимающая по вертикали одновременно и каретку Х.
Теперь о процессе сборки:
Рама
Сборка рамы производится с помощью 18-ти винтов М3х10 с гайками в следующей последовательности:



- Фланцы 2 фиксируются двумя винтами на раме 1. Кронштейны 4 и 5 на элементах 3 четырьмя винтами;
- Стенки 6 крепятся к раме с помощью четырех винтов;
- Фланцы 7 фиксируются на раме четырьмя винтами. Элементы 3 на стенках с помощью четырех винтов.
Ось Y (привод стола)
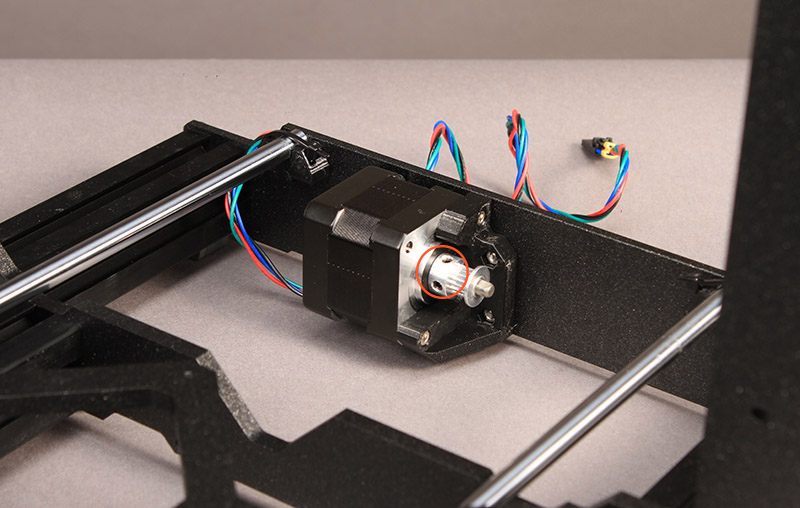
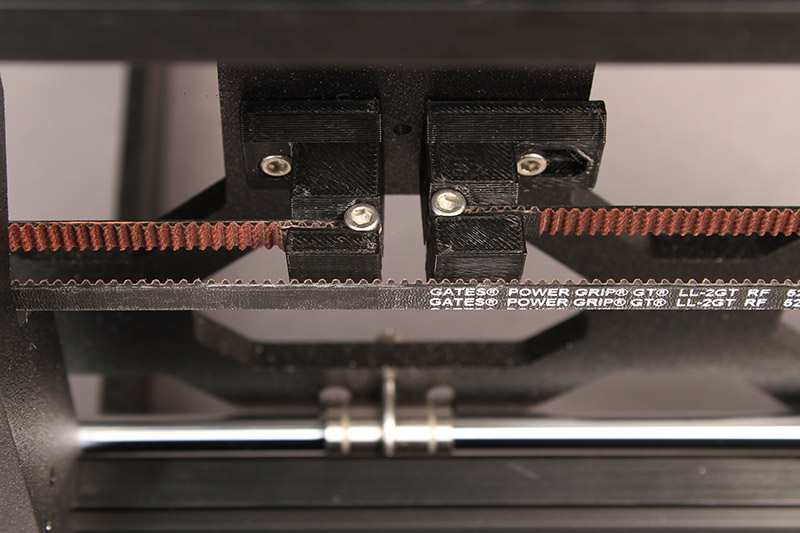
- Стол перемещается шаговым двигателем типоразмера NEMA17. Двигатель крепится с помощью четырех винтов М3х20 и восьми гаек. Затем фиксируется шкив так, чтобы зубчатый венец находился по центру оси. Чтобы избежать перекосов ремня GT-2 рекомендуется использовать пару из 20-тизубого шкива и роликов диаметром 11мм (подшипники серии 694).
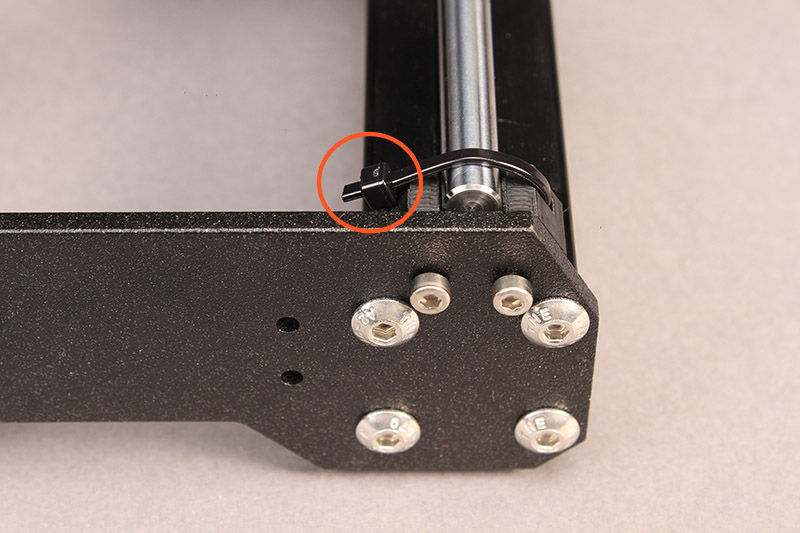
- Для автоматического определения положения стола перед началом печати опционально устанавливается механический концевой выключатель(концевик). Концевик крепится двумя винтами М3х10 с гайками через шайбы(гайки), исключающие замыкание платы на корпус. Выключатели оптического типа устанавливаются аналогично, однако в этом случае необходимо достаточно аккуратно установить ответные части, чтобы избежать неполного включения/выключения оптопары.



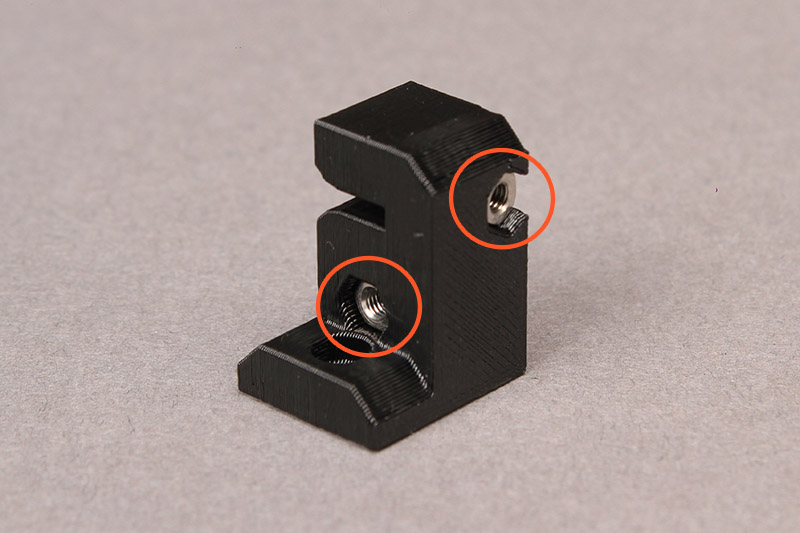
- На рамку стола 8 устанавливается кронштейн 9 с помощью четырех винтов М3х20 и 12 гаек. Затем крепится фиксатор ремня 10 двумя винтами М3х10 с гайками.
- Четыре линейных подшипника LM8UU устанавливаются в пазы и притягиваются нейлоновыми стяжками;
- Чтобы избежать отлипания деталей из высокотемпературных пластиков в процессе печати опционально устанавливается подогреваемый стол. Алюминиевый стол крепится через пружины четырьмя винтами М3х20 и восемью гайками со стороны рамки. Для подключения используются гибкие провода сечением не менее 0,5мм2. Текстолитовый стол устанавливается аналогично, однако для выравнивания поверхности сверху необходимо установить термообработанное стекло или зеркало.
- В центре стола устанавливается термистор для определения температуры поверхности. Проводники рекомендуется защитить от перетирания гибкой плетеной или спиральной оплеткой.
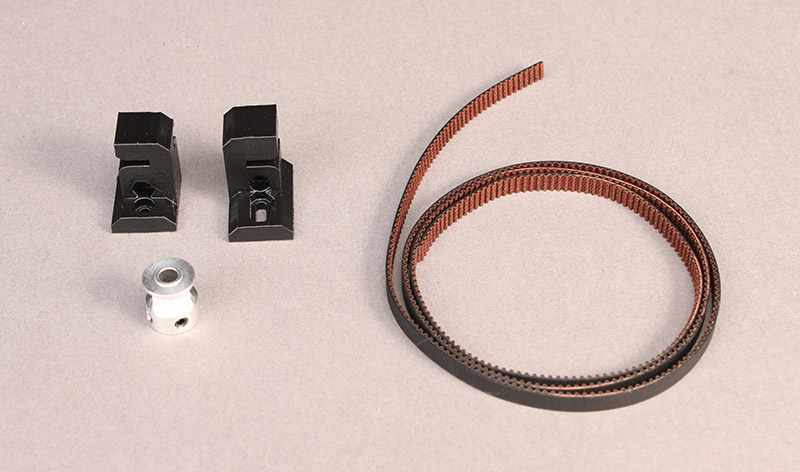
- Для удобства сборки, предварительно устанавливается ремень GT-2 длиной порядка 0,7м в фиксатор 10. Позднее, излишки можно отрезать, а натяжение отрегулировать натяжным роликом. Не рекомендуется прилагать чрезмерные усилия при регулировки натяжения зубчатого ремня и затягивании фиксатора, это не требуется и может повредить нейлоновый корд ремня.
- Далее стол в сборе устанавливается на линейные направляющие ø8мм длиной не менее 350мм. Направляющие фиксируются четырьмя стопорными кольцами из комплекта метизов или небольшим количеством ‘супер’ клея. Клей придает дополнительную вибростойкость раме и, при необходимости, легко удаляется с полированной поверхности направляющих.
- Затем устанавливается ролик натяжения ремня винтом М4х20 с гайкой. В качестве ролика рекомендуется использовать два фланцевых подшипника F694ZZ с тремя шайбами М4.
Ось Z (Вертикальная)
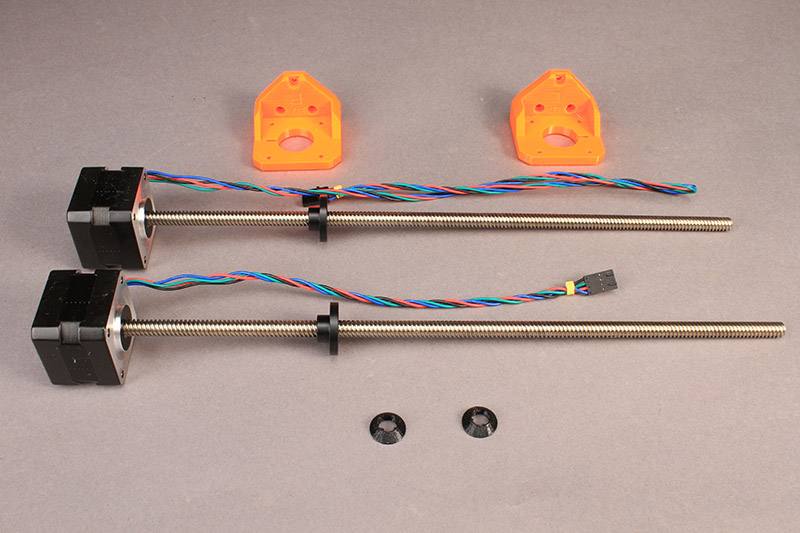
- В деталях 11 и 12 устанавливаются четыре кронштейна 13 с помощью восьми винтов М3х10 с гайками. Затягивать винты до установки направляющих валов оси X не следует;
- Фланцы 14 устанавливаются на кронштейны 13 с помощью четырех винтов М3х10 с гайками. Если используются метрические шпильки М6, то необходимо предварительно запрессовать две гайки М6 с помощью тисов. В случае трапецеидальных винтов — грузовые узлы устанавливаются с помощью четырех винтов М3х10 с гайками;
- Четыре линейных подшипника LM8UU устанавливаются в пазы и притягиваются нейлоновыми стяжками;
- Для автоматического определения положения каретки перед началом печати опционально крепится механический концевик двумя винтами М3х10 с гайками через шайбы(гайки), исключающие замыкание платы на корпус. Концевик оптического типа устанавливаются аналогично.
-




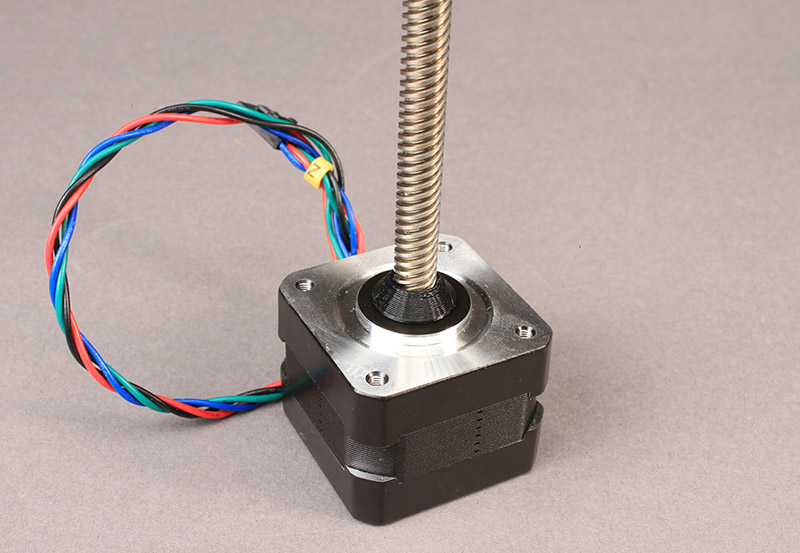
- Далее устанавливаются два двигателя NEMA17 привода оси с помощью восьми винтов М3х6 и две эластичные муфты 5х6 (5х8 для трапецеидальных винтов). Затем в левой части рамы фиксируется двумя гайками винт регулировки коцевика М3х40.
Ось Х (Привод каретки)
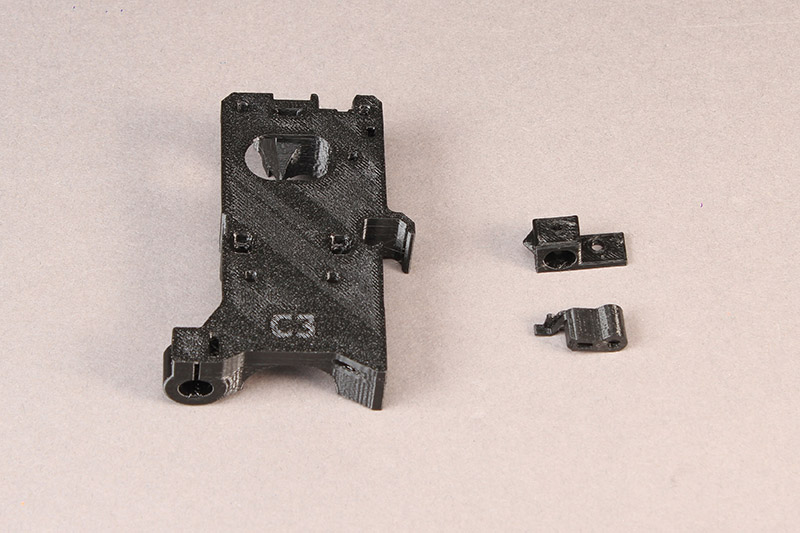
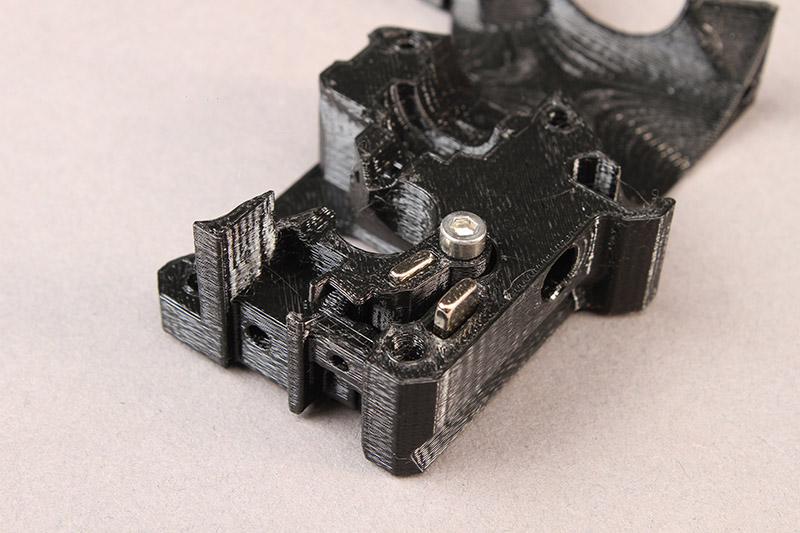
- В элемент 15 устанавливается кронштейн Bowden экструдера 16 двумя винтами М3х10 с гайками. Если используется экструдер прямой подачи или Вэйда, то выступающую часть кронштейна 16 необходимо отломить по насечкам;
- Затем, при необходимости, устанавливается элемент 17 регулировки концевика оси Х;
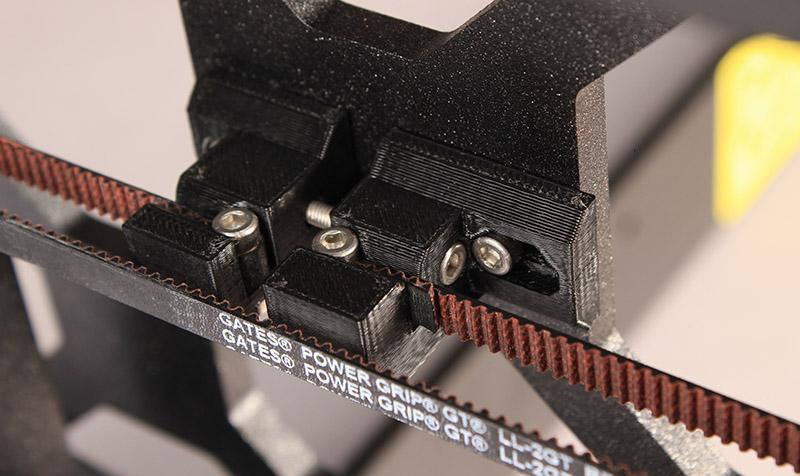
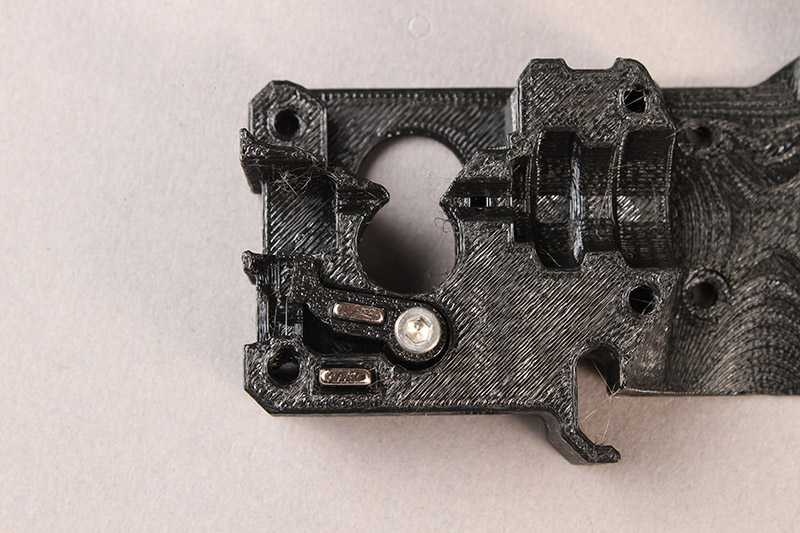
- Фиксатором 10 предварительно крепится ремень GT-2 длиной порядка 0,9м с помощью двух винтов М3х10 с гайками;
- Три линейных подшипника LM8UU устанавливаются в пазы и притягиваются нейлоновыми стяжками;



Экструдер
Каретка универсальная, предназначена для различный типов экструдера.
Если у вас экструдер типа bowden, установите хотенд на каретку Х, и прижмите деталью №18 с помощью 2х винтов.
Фланец экструдера (деталь №19) установите на раму с обратной стороны, между деталями №20.



Электроника
В комплекте с рамой идет крепеж для 4х строчного и полнографического дисплея


Предусмотрены отверстия для крепления электроники и блока питания.


На этом все. Рассказывать о подключении электроники смысла нет, об этом было множество статей на этом сайте.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы
будете
получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Подписаться
13
Комментарии к статье
Еще больше интересных статей
GCODE: Плюшки от Павлушки
xedos
Загрузка
19.04.2016
108720
184
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы
будете
получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Подписаться
Добрый день уважаемые читатели!
Сегодня хотелось бы рассказать о GCODE….
Мама, почему я репрап?
eta4ever
Загрузка
09.08.2017
18636
126
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы
будете
получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Подписаться
Все началось весной 2015 года. Большие пацаны (в интернете, конечно, на улицу я выходить боюсь) пока…
Экструдер 1
3DLadnik
Загрузка
14.12.2018
18977
117
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы
будете
получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Подписаться
Экструдер — это первое что я поменял на своём 3Д принтере.
Купленный на «Али» МК8 я…
Читайте в блогах
Подготовка
Перед сборкой стальные элементы рекомендуется окрасить в желаемый цвет. Необходимый инструмент:
- Отвертки с крестообразным и прямым шлицами;
- Ключи гаечные №5.5, 7 или пассатижи;
- Набор шестигранных ключей;
- Штангенциркуль или линейка;
- Нож, паяльник.
Рекомендуемые стандартные комплектующие:
- Рама с комплектом метизов;
- Направляющий вал ø8мм — 2,4м;
- Подшипник линейный LM8UU — 11шт;
- Шаговый двигатель типоразмера NEMA 17 — 5шт;
- Контроллер Arduino Mega 2560;
- Плата расширения RAMPS 1.4;
- Драйверы шаговых двигателей A4988 или DRV8825 — 4шт;
- Концевые выключатели — 3шт;
- Подшипники серии 694 или аналогичные — 4шт;
- Ремень GT2 — 2м;
- Шкив зубчатый GT2 — 2шт;
- Резьбовые шпильки М6 или трапецеидальные винты с гайками — 2шт;
- Блок питания 12В 300…360Вт;
- Провод сигнальный — 20м;
- Провод силовой — 2м;
- Вентилятор — 2шт;
- Дополнительный метиз для крепления двигателей, концевиков и прочего (М3х6 – 12шт, М3х20-4шт, М3х10-6шт);
- Изоляционная лента или термоусадочная трубка;
- Стяжки нейлоновые №2,5…3,5.
Рама
Сборка рамы производится с помощью 18-ти винтов М3х10 с гайками в следующей последовательности:



- Фланцы 2 фиксируются двумя винтами на раме 1. Кронштейны 4 и 5 на элементах 3 четырьмя винтами;
- Стенки 6 крепятся к раме с помощью четырех винтов;
- Фланцы 7 фиксируются на раме четырьмя винтами. Элементы 3 на стенках с помощью четырех винтов.
Ось Y (привод стола)
- Стол перемещается шаговым двигателем типоразмера NEMA17. Двигатель крепится с помощью четырех винтов М3х20 и восьми гаек. Затем фиксируется шкив так, чтобы зубчатый венец находился по центру оси. Чтобы избежать перекосов ремня GT-2 рекомендуется использовать пару из 20-тизубого шкива и роликов диаметром 11мм (подшипники серии 694).
- Для автоматического определения положения стола перед началом печати опционально устанавливается механический концевой выключатель(концевик). Концевик крепится двумя винтами М3х10 с гайками через шайбы(гайки), исключающие замыкание платы на корпус. Выключатели оптического типа устанавливаются аналогично, однако в этом случае необходимо достаточно аккуратно установить ответные части, чтобы избежать неполного включения/выключения оптопары.



- На рамку стола 8 устанавливается кронштейн 9 с помощью четырех винтов М3х20 и 12 гаек. Затем крепится фиксатор ремня 10 двумя винтами М3х10 с гайками.
- Четыре линейных подшипника LM8UU устанавливаются в пазы и притягиваются нейлоновыми стяжками;
- Чтобы избежать «отлипания» деталей из высокотемпературных пластиков в процессе печати опционально устанавливается подогреваемый стол. Алюминиевый стол крепится через пружины четырьмя винтами М3х20 и восемью гайками со стороны рамки. Для подключения используются гибкие провода сечением не менее 0,5мм2. Текстолитовый стол устанавливается аналогично, однако для выравнивания поверхности сверху необходимо установить термообработанное стекло или зеркало.
- В центре стола с помощью каптоновой ленты или силиконового герметика устанавливается термистор для определения температуры поверхности. Проводники рекомендуется защитить от перетирания гибкой плетеной или спиральной оплеткой.
- Для удобства сборки, предварительно устанавливается ремень GT-2 длиной порядка 0,7м в фиксатор 10. Позднее, излишки можно отрезать, а натяжение отрегулировать натяжным роликом. Не рекомендуется прилагать чрезмерные усилия при регулировки натяжения зубчатого ремня и затягивании фиксатора, это не требуется и может повредить нейлоновый корд ремня.
- Далее стол в сборе устанавливается на линейные направляющие ø8мм длиной не менее 350мм. Направляющие фиксируются четырьмя стопорными кольцами из комплекта метизов или небольшим количеством «супер» клея. Клей придает дополнительную вибростойкость раме и, при необходимости, легко удаляется с полированной поверхности направляющих.
- Затем устанавливается ролик натяжения ремня винтом М4х20 с гайкой. В качестве ролика рекомендуется использовать два фланцевых подшипника F694ZZ с тремя шайбами М4.
Ось Z (вертикальная ось)
- В деталях 11 и 12 устанавливаются четыре кронштейна 13 с помощью восьми винтов М3х10 с гайками. Затягивать винты до установки направляющих валов оси X не следует;
- Фланцы 14 устанавливаются на кронштейны 13 с помощью четырех винтов М3х10 с гайками. Если используются метрические шпильки М6, то необходимо предварительно запрессовать две гайки М6 с помощью тисов. В случае трапецеидальных винтов — грузовые узлы устанавливаются с помощью четырех винтов М3х10 с гайками;
- Четыре линейных подшипника LM8UU устанавливаются в пазы и притягиваются нейлоновыми стяжками;
- Для автоматического определения положения каретки перед началом печати опционально крепится механический концевик двумя винтами М3х10 с гайками через шайбы(гайки), исключающие замыкание платы на корпус. Концевик оптического типа устанавливаются аналогично.



- Далее устанавливаются два двигателя NEMA17 привода оси с помощью восьми винтов М3х6 и две эластичные муфты 5х6 (5х8 для трапецеидальных винтов). Затем в левой части рамы фиксируется двумя гайками винт регулировки коцевика М3х40.
- Устанавливаются две линейные направляющие ø8мм длиной не менее 325мм и две резьбовые шпильки М6 (трапецеидальные винты). Направляющие фиксируются с помощью двух стопорных колец или «супер» клеем.
Ось X (привод каретки)
- В элемент 15 устанавливается кронштейн Bowden экструдера 16 двумя винтами М3х10 с гайками. Если используется экструдер прямой подачи или Вэйда, то выступающую часть кронштейна 16 необходимо отломить по насечкам;
- Затем, при необходимости, устанавливается элемент 17 регулировки концевика оси Х;
- Фиксатором 10 предварительно крепится ремень GT-2 длиной порядка 0,9м с помощью двух винтов М3х10 с гайками. Позже, при регулировке натяжения, излишки ремня можно будет отрезать;
- Три линейных подшипника LM8UU устанавливаются в пазы и притягиваются нейлоновыми стяжками;



- Далее каретка в сборе устанавливается на две линейные направляющие ø8мм длиной не менее 400мм. Направляющие фиксируются с помощью восьми винтов оси Z;
- Кареретка перемещается шаговым двигателем типоразмера NEMA17. Двигатель крепится с помощью четырех винтов М3х6. Шкив фиксируется так, чтобы зубчатый венец находился по центру фиксатора ремня. Регулировка натяжения ремня осуществляется двигателем;
- Затем устанавливается ролик ремня винтом М4х20 с гайкой. В качестве ролика рекомендуется использовать два фланцевых подшипника F694ZZ с двумя шайбами М4.
Экструдер
Каретка универсальная, предназначена для различный типов экструдера.



Электроника
- На одной из боковых стенок устанавливается основной контроллер, рекомендуется плата Arduino MEGA 2560 в связке с платой расширения RAMPS 1.4;
Будьте аккуратны при обращении с электроникой, статическое электричество может вывести любую плату из строя, а металлический крепеж привести к короткому замыканию или повреждению платы.
- На RAMPS устанавливаются драйверы шаговых двигателей, рекомендуется использовать четыре A4988;
Обратите внимание на маркировку пинов драйвера и платы расширения, неправильное положение приводит к повреждению электроники.
На RAMPS, под драйверами, должны быть установлены перемычки микрошага. Для A4988 рекомендуется оставить все три «джампера», что соответствуют значению микрошага 1/16.
На каждом драйвере расположен подстроечный резистор для регулировки силы тока двигателя. Далее в процессе настройки, рекомендуется установить минимально необходимый ток. Если тока недостаточно для движения и удержания оси и в процессе печати появляются пропуски шагов, то резистор необходимо повернуть по часовой стрелке. Если происходит чрезмерный нагрев двигателей и электроники, то против часовой. Возможно также понадобится установить радиаторы драйверов и/или принудительный обдув платы расширения.



- Далее устанавливается блок питания с силой тока не менее 20А и напряжением 12В;
Внимание! Используйте только безопасные закрытые источники питания. Не следует недооценивать опасность сетевого напряжения для Вас и третьих лиц. Продавец (производитель) комплектующих (готовых изделий) не несет никакой ответственности за возможные последствия.
- Шаговые двигатели, концевики, термисторы и нагревательные элементы, вентиляторы подключаются согласно схемы.
При подключении двигателей оси Z параллельно друг другу используйте одинаковые провода одинаковой длины, это уменьшит возможную разность крутящих моментов. Для этого на плате RAMPS предусмотрено два параллельных разъема оси Z.
Прошивка
По умолчанию в комплект для сборки принтера уже загружена полноценная управляющая программа (прошивка) и каких-либо действий не требуется. Установленная версия отображается на мониторе при включении принтера.
Для новых и устаревших плат управления прошивку необходимо обновить.
-
Версия Дата Конфигурация 1.1.1-rc8 10.02.17 Контроллер Smart, экструдер MK8 - Предварительно следует загрузить и установить актуальную версию программной среды Arduino;
- Подключить плату Arduino USB-кабелем к компьютеру. Компьютер должен автоматически установить драйверы, это может занять несколько минут;
В зависимости от операционной системы компьютера, может возникнуть необходимость установить драйверы вручную, согласно пошаговой инструкции. В процессе установки следует обратить внимание на номер COM-порта к которому подключена плата. Далее запустить среду разработки Arduino и проверить настройки программатора в меню «Инструменты»: «Плата»-«Arduino Mega 2560», «Процессор»-«ATmega2560», «Порт»-«COMxx», где xx — номер порта к которому подключена плата.
- Далее необходимо загрузить и распаковать ZIP-архив с последней версией прошивки. В папке «Marlin» открыть файл «Marlin.ino». Нажать кнопку «Загрузка», среда Arduino выполнит компиляцию кода и загрузит его в микроконтроллер.
В процессе компиляции прошивки может потребоваться наличие дополнительных библиотек в папке «libraries» среды Arduino. Для контроллера Smart Full Graphic необходимо загрузить и распаковать ZIP-архив U8glib_Arduino-master.
Программое обеспечение
Для работы с принтером используется управляющая программа Repitier Host или аналогичная. При подключении Smart контроллера принтер может работать автономно без подключения к компьютеру, для загрузки моделей достаточно SD-карты.
Внимание! Возможны незначительные отличия, направленные на совершенствование конструкции и совместимость с новыми комплектующими. Вопросы можно задавать техподдержке на Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в браузере должен быть включен Javascript.. Будем благодарны за конструктивные комментарии.
Contents
- 1 EiNSTeiN Variant
- 2 Single Sheet Frame Style
- 2.1 Materials
- 2.1.1 Rods
- 2.1.1.1 X Axis
- 2.1.1.2 Y Axis
- 2.1.1.3 Z Axis
- 2.1.1 Rods
- 2.1 Materials
- 3 Box Frame Style
- 3.1 Materials
- 3.1.1 Rods
- 3.1.1.1 X Axis
- 3.1.1.2 Y Axis
- 3.1.1.3 Z Axis
- 3.1.2 Wood
- 3.1.1 Rods
- 3.2 Construction
- 3.1 Materials
- 4 Rapid Prototype Parts
- 4.1 BOM
- 5 File Sources
- 5.1 Github
- 5.2 STLs:
- 6 Other Build Documentation
- 6.1 Box Frame tutorial by Kliment
- 6.2 Build instructions of singe plate as an interactive animation
- 7 Extruder Discussion
- 8 Hybridisation/RepStrap
EiNSTeiN Variant
To reduce confusion, documentation of the EiNSTeiN variant has been moved to here http://reprap.org/wiki/JBFromOZ.
Single Sheet Frame Style

Official vanilla Prusa i3 build manual by Prusa is available at http://prusa3d.dozuki.com/c/Prusa_i3_kit
Materials
Rods
Source: https://github.com/josefprusa/Prusa3/blob/master/box_frame/doc/dimensions.md
X Axis
- 2x 370mm M8 smooth rod
- 1x 20mm M8 smooth (for extruder idler, use 8×20 threaded rod or grub screw instead as substitute)
Y Axis
- 4x 205mm M8 threaded — Note: 210mm for nyloc nuts. If they are cut to exactly the same length will make assembly easier.
- 2x 350mm M8 smooth rod — Note: take care to cut to exactly same length.
- 2x 380mm M10 threaded
Z Axis
- 2x 320mm M8 smooth rod.
- 2x 300mm M5 threaded (or 320mm if you want it to protrude above the frame).
In summary:
| M5 Threaded | M8 Smooth | M8 Threaded | M10 Threaded |
|---|---|---|---|
| 2 x 300mm | 2 x 370mm | 4 x 205mm | 2 x 380 |
| 1 x 20mm | |||
| 2 x 350mm | |||
| 2 x 320mm | |||
| 600mm | 2100mm | 820mm | 760mm |
Note: Last row shows totals for each size/finish
Box Frame Style
Materials
Rods
Source: https://github.com/josefprusa/Prusa3/blob/master/box_frame/doc/dimensions.md
X Axis
- 2x 470mm M8 smooth rod
- 1x 20mm M8 smooth (for extruder idler, use 8×20 threaded rod or grub screw instead as substitute)
If you want to play with the X length, you will have to cut the top (longest) plate as long as the smooth rod and one of the 450mm is actually (X rod length — 2x plate thickness) long. The rods may be longer, but should not be shorter by more than 1cm.
Y Axis
- 2x 370mm M8 smooth rods
- 2x 400mm M10 threaded rod
- 4x 205mm M8 threaded rods
Z Axis
- 2x 405mm M8 smooth rod
- 2x ~370mm M5 threaded rod
You could play with the Z lengths to increase building height.
For this you will need longer wood cut for 4 of the 450x100mm plates; the plates are (Z rod length + 45mm) long.
Wood
The wood pieces can be cut from one 24x48x1/2″ sheet of plywood.
The default thickness is 12mm (near 1/2″). Get something that is strong and not likely to warp (change shape) due to temperature and humidity! The thickness is mostly needed to hold the screws used hold the frame together and to mount parts onto it. The entire frame structure must be stiff, holding its shape regardless of what it’s sitting on.
Any wood over 12mm thickness will not work for the bottom plate with default config, as the Y will then be lifted from the ground. So if you are using thicker wood for the frame, be sure to change board_thickness in configuration.scad before printing parts.
- 6x 450x100x12mm wood
- 1x 475x100x15mm wood
- 60x 3.5x20mm (or #6 x 3/4”) wood screws
- Wood glue (optional)
- Sealant or paint (optional)
Wood warps as humidity changes. To minimize this, select pieces with uniform edge-grain without knots. Oak, poplar, and birch are good choices. Using a wood sealant will minimize changes in moisture content. A thin, light, unsealed wood should be used for the heated bed. A heavy bed will limit print speed and quality, and the heat will break down the sealant. Even paraffin wood sealants designed for saunas wouldn’t be able to keep steam from leaving the surface if it gets close to 100°C. It would, however, prevent moisture from returning to that surface after cooldown. Uneven moisture content is what CAUSES warping, so this is a bad idea.
Construction
The exact width of the boards is not crucial, so long as the lengths are appropriate to the rods used. Note that the width of the bottom board limits how far forward the Y axis can be placed; this is compensated for by offsetting the linear bearings on the Y carriage/bed.
If different board thicknesses are used, the design will have to be modified slightly.
The Y axis M10 threaded rods should just clear the bottom of the frame, in order for the printed attachment points to sit at roughly the right level. The frame width (475mm) should be 5mm longer than the x axis smooth rod length (470mm).
The 475mm board is longer so that it can span the whole frame width and overlap two other boards, which are 12mm thick. (450 + 12 + 12 ≈ 475mm).
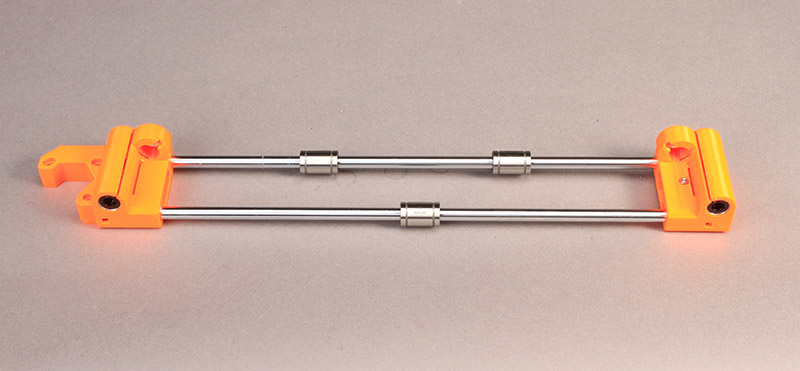
Rapid Prototype Parts
| Description | Qty | Image |
| RP Parts | located in Prusa/single_plate folder | |
| z-axis-top.scad preview |
1 |
|
| z-axis-bottom.scad preview |
1 |
|
| y-motor.scad preview |
1 |
|
| y-idler.scad preview |
1 |
|
| y-corners.scad (M10 x 1 M8 x 2 holes) preview |
4 |
|
| y-belt-holder.scad preview |
1 |
|
| x-end-motor.scad preview |
1 |
|
| x-end-idler.scad preview |
1 |
|
| x-carriage.scad preview |
1 |
|
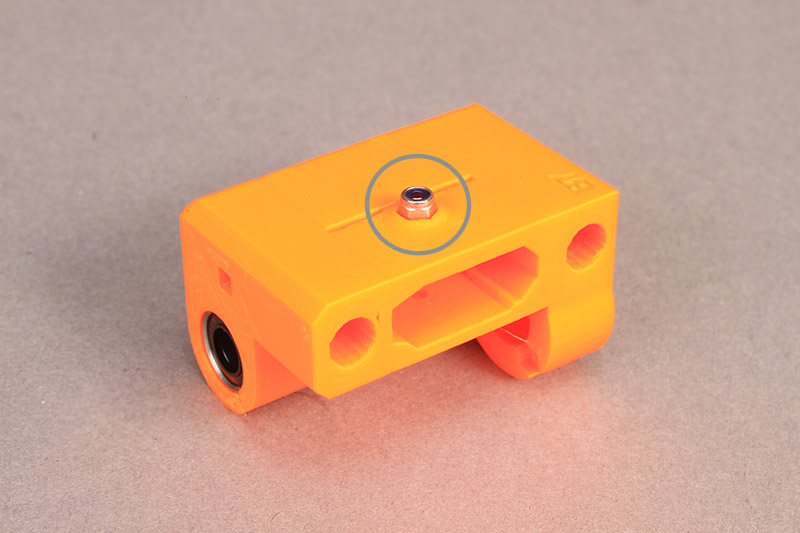
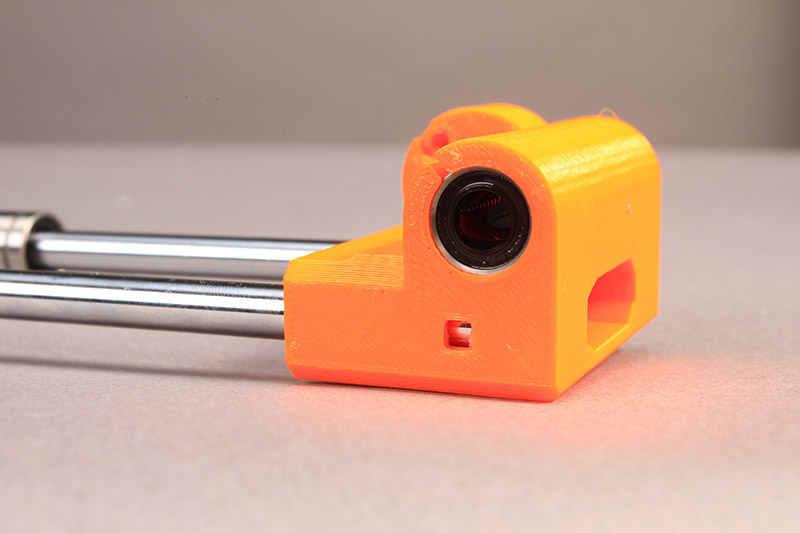
| magnetic-holder.scad (used for hall effect sensors / endstops) preview |
2 |
|
| fan-mount.scad preview |
1 |
|
| belt-guide.scad (suit 623 bearing) preview |
4 |
|
| Extruder options | not complete documentation at this stage | |
| gregs-wade.scad (in box_frame/extras folder) preview |
1 (???) |
|
| greg-adapter.scad (in mini/extruder/greg-wade folder) | 1 (???) |
|
| dual-extruder.scad (deprecated — experimental) | 1 (???) |
|
| compact-extruder.scad (experimental — likely to be replaced by nema17 extruder) | 1 (???) |
|
| Single-Frame i3 | Aluminium 6mm plate 370mm x 370mm | |
| Prusa3ALU-FREZOVANY-v4.dxf | 1 |
|
BOM
There are a number of variants of i3 single plate.
The original Prusa variant BOM is located at https://docs.google.com/spreadsheet/ccc?key=0Aga03tFhujeidDJzR0ZJNFZQYkhXTXlWd1BLRkN4Nmc&usp=sharing
The JBFromOZ BOM, RP list and build info on his EiNSTeiN variant is here
The current BOM used by BotBuilder.net for their workshops is located here: http://www.botbuilder.net/documentation — Updated Oct. 2013.
The Sourcing Your Own Parts section of the i3 buyer’s guide is an attempt to make a comprehensive parts list, with links and info on ordering individual components.
File Sources
Github
- https://github.com/josefprusa/Prusa3 — Josef Prusa — main development repository — scad file sources only available
- https://github.com/alexrj/Prusa3/tree/i3-unterwelt — Sound MINI repository, MGS extruder repository (files for parts shown above) — scad file sources and stl files available
- https://github.com/EiNSTeiN-/Prusa3/ — EiNSTeiN — 608 bearings, compact dual extruder repository, note that Y ends for M10 not M8 rods — scad file sources only available
- https://github.com/josefprusa/Prusa3-vanilla/tree/master/distribution — vanilla — used by josef prusa in his workshops — scad file sources and stl files available
- https://github.com/Joaz/machine_parts/tree/master/mgs_prusa — Joaz — MGS extruder repository (parts not shown above)
- https://skydrive.live.com/?cid=61d9a16368c58a74&id=61D9A16368C58A74!107&ithint=file,.rar&authkey=!AOcaZeSUEgaTCBA — 3D Printer Czar — STLs with improved Y belt holder
STLs:
- Einstein stls: singleplate —>>File:Einstein-singleplate-stl.zip (generated 19/2/2014)
- Einstein stls: boxframe —>>File:Einstein-boxframe-stl.zip (generated 19/2/2014)
- vanilla stls:File:I3vanilla.zip
NOTE: developers are encouraged to link or post their sources but also printable stl files, currently (19/2/2014) some of the scad files are throwing errors or missing variable names or simply don’t generate anything, instructions for generating stl files from scad files are unclear in terms of which ones to use, the above stl zip files may or may not be accurate however it’s better than the previous situation,there are more zipped stl files to be done — thejollygrimreaper
Other Build Documentation
- Acrylic frame build document by 3D Printer Czar: https://skydrive.live.com/redir?resid=61D9A16368C58A74!113&authkey=!AI2iTJjJC1ZxdG0&ithint=file%2c.pdf
- Single plate build pics: http://www.sub-design.co.uk/i3build/
- Prusa i3 Frame Kit Build Manual by ReprapUniverse.com: http://dl.dropboxusercontent.com/s/femvh8j5njf4sag/prusa_i3_frame_kit_build_manual.pdf
- Build Documentation: http://78.47.92.212/i3_documentation_pics/
- BotBuilder.net Workshop Build Documentation — (50 page PDF)
- Build Videos
Box Frame tutorial by Kliment
- http://78.47.92.212/i3_documentation_pics/
- http://koti.kapsi.fi/~kliment/photos/i3/
- http://koti.kapsi.fi/~kliment/photos/prusa3/
- http://www.flickr.com/photos/prusajr/8127635345/in/photostream
Build instructions of singe plate as an interactive animation
- [[:File:Linux.zip | Build instructions as a Linux binary]
- As an online tool that works in Windows and OSX.
- New Design complete laser cut kit assembly: http://twelvepro.com/news/?page_id=31
Notes:
- JBFromOZ — notes preparing to build an aluminium frame prusa i3. EiNSTeiN variant JBFromOZ#Build Instructions (With Pictures!)
- Prusa i1/i2 smooth rod lengths should be usable for an i3 single-plate reprap.
- Instructions on the github say to RP each part in the single-plate folder. I believe this instruction applies to the box frame version only, some items need more than 1 copy.
Extruder Discussion
It is not yet 100% clear which extruder to use, there is a dual extruder and a compact extruder in the branch though neither looks complete.
there is also a Greg’s adapter (Greg’s Hinged Extruder ?) in the /mini/extruder/greg-wade folder, it uses the nuts_and_bolts.scad which needs to be copied to the openscad library folder.
I am planning to use a MGS extruder with a Nema17 stepper, designs from Sound are shown from his i3-unterwelt branch
Build photos from EiNSTieN’s build record, including some additional reference to his edits for 608 bearings, GT2 belts, dual extruders etc.
Hybridisation/RepStrap
Wooden feet to replace plastic feet (y-corners.scad (M10 x 1 M8 x 2 holes)?
While waiting to receive an order of printed parts why not build the base using wooden feet?
Question is what amount of vibration will be experienced? If excessive could you use some old (carpet?) padding?
Any ideas?