
В этом руководстве я покажу вам как сделать первоначальную настройку Betaflight. Для начала вам нужно будет нужно скачать конфигуратор и подключить полетный контроллер к компьютеру при помощи USB кабеля. Затем мы пройдем все необходимые шаги по настройке с самого начала и до первого полета.
Оригинал: How to Setup Betaflight Firmware
Betaflight — отличная прошивка с открытым исходным кодом, разработана специально для гоночных коптеров.
Дополнительная информация: обзор прошивок для полетных контроллеров
Ниже я покажу простые шаги по настройке вашего первого коптера, достаточные для того, чтобы поднять его в воздух.
Как только вы разберетесь с этим руководством, посмотрите и другие статьи/инструкции, они помогут вам разобраться с более продвинутым функционалом Betaflight.
- Консоль Betaflight (CLI)
- Режим AirMode
- Переназначение ресурсов (Resource Remapping)
- Настраиваем Failsafe (англ.)
- Betaflight OSD
- Управление видеопередатчиком (VTX control)
- Программная эмуляция последовательного порта (SoftSerial)
- LUA скрипты
- Телеметрия с регуляторов скорости (ESC)
- Управление курсовой камерой
- Фильтры (англ.)
- Какое время цикла (looptime) лучше использовать
- Порог придурковатости
- Разгоняем полетный контроллер до 32 кГц (англ.)
- Настраиваем PIDы при помощи Blackbox (инструкция несколько устарела)
Прежде чем начать
Чтобы сделать это руководство наиболее простым, я подразумеваю, что у вас есть вот это железо:
- Приемник FrSky с SBUS и SmartPort телеметрией
- Полетный контроллер на процессоре F3 или F4 с прошивкой Betaflight 3.2 или новее
- Регуляторы скорости, которые поддерживают протокол DShot
Прежде чем мы начнем, скачайте Betaflight Configurator. Вот список шагов, так сказать краткое содержание, согласно используемым вкладкам в приложении:
- Setup
- Ports
- Configuration
- Receiver
- Modes
- Motor
- OSD
- PID Tuning
Настройка Betaflight для первого полета
Тут мы пройдемся по основным параметрам Betaflight, необходимым для первого полета.
Важно! Снимите все пропы с коптера прежде чем начинать настройку!
Подключаем Micro USB кабель
Подключенный MicroUSB кабель питает полетный контроллер.

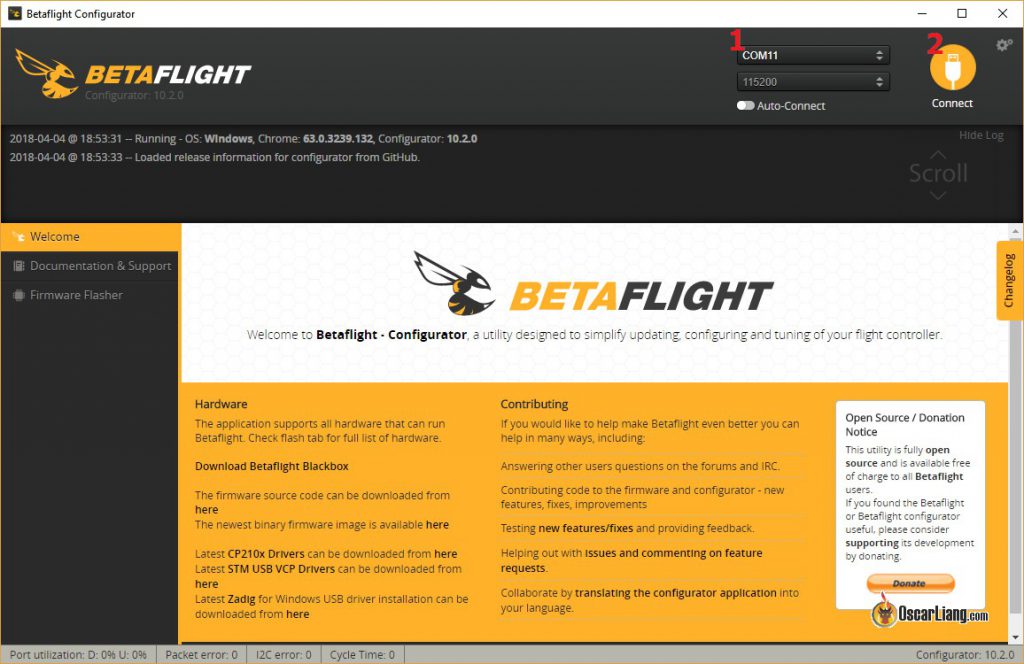
В конфигураторе должен появиться новый COM порт, выберите его и нажмите «Connect«. В моем примере порт COM11, у вас скорее всего будет другой номер. При подключении разных ПК, номер порта тоже будет разным.
Вкладка Setup
Вы должны увидеть вкладку Setup сразу, как только подключитесь к полетному контроллеру.
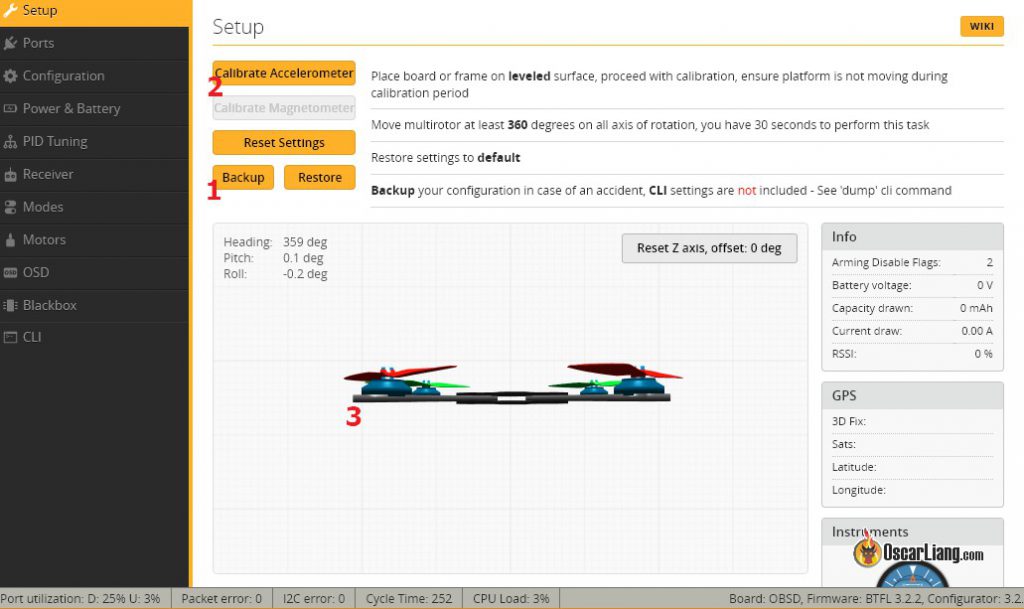
- Прежде чем менять настройки, сделайте резервную копию.
- Поставьте коптер на ровную горизонтальную поверхность, и откалибруйте акселерометры (см. картинку).
- Покрутите коптер в руках, 3Д модель должна вращаться так же, как и коптер
Если 3Д модель не двигается или двигается не так как коптер, тогда скорее всего полетный контроллер установлен не той стороной (обычно на плате есть стрелка, которая должна указывать вперед). В этом случае можно повернуть плату на коптере или задать YAW offset на вкладке Configuration (обычно это углы 90, 180 или 270 градусов).
Вкладка Ports
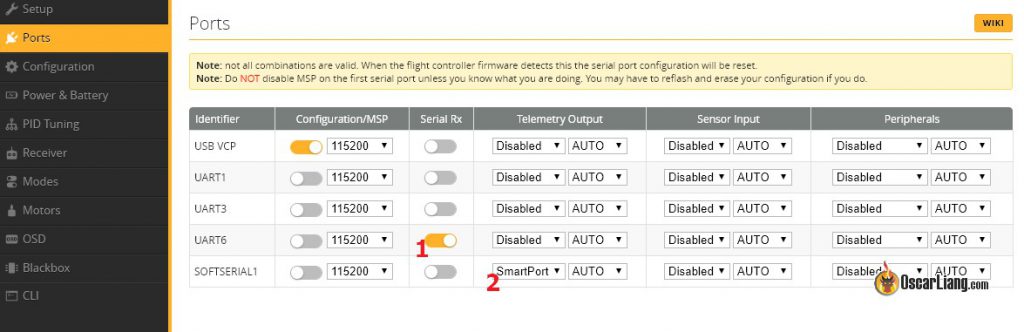
- Если у вас приемник SBUS или IBUS, тогда включите «Serial RX» на том порту, к которому приемник подключен.
- Если вы используете SmartPort телеметрию, тогда в столбце Telemetry Output выберите «SmartPort«; если не используете, тогда ничего не меняйте.
Вкладка Configuration
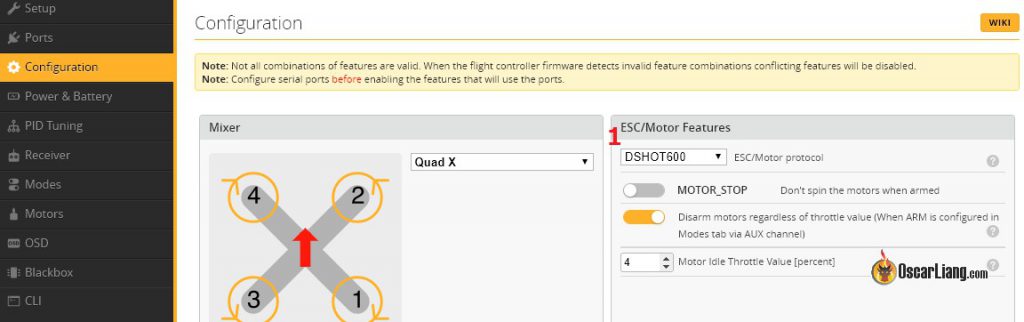
- Раздел ESC/Motor Features
Протокол регуляторов скорости (регуляторов оборотов) — посмотрите на характеристики вашего оборудования, какие протоколы оно поддерживает. Рекомендуется использовать DShot. Обычно регуляторы с прошивкой BLHeli_S поддерживают DShot300 или DShot600, а с прошивкой BLHeli_32 — даже DShot1200.
Дополнительная информация: протоколы и прошивки для регуляторов скорости.
Рекомендую отключить параметр «MOTOR_STOP«, иначе вы не сможете определить армлен коптер или нет.
Остальные параметры можно не трогать и оставить значения по умолчанию.
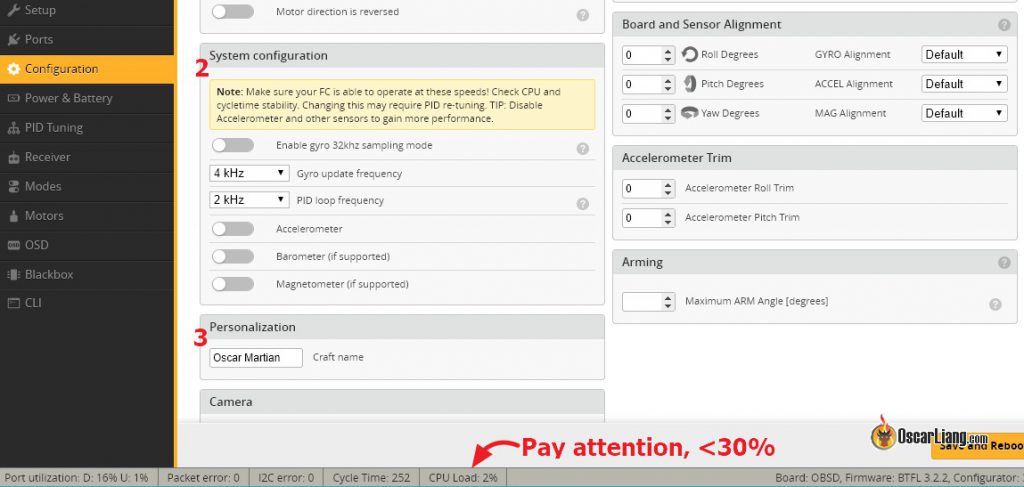
2. Раздел System Configuration
Looptime — время цикла, с этой частотой полетный контроллер рассчитывает полетные параметры, значение зависит от возможностей процессора, на шумных коптерах я предпочитаю использовать довольно низкую частоту 2 кГц, а на качественных коптерах — частоту повыше — 8 кГц. В любом случае, для начала подойдет и 2 кГц.
Gyro Sampling Rate — частота опроса гироскопов, обычно совпадает с looptime, хотя некоторые предпочитают поставить удвоенную частоту looptime. Можете поставить 4 кГц и looptime 2 кГц.
Потом поэкспериментируете и выберете наиболее подходящие значения, жестких правил по их выбору нет.
При смене значений этих параметров обратите внимание на CPU load (загрузка процессора) внизу экрана, старайтесь держать это значение меньше 30%. Если значение будет выше, то полетный контроллер может работать нестабильно.
Accelerometer — можно отключить, это высвободит немного процессорных ресурсов, но тогда вы не сможете использовать режимы Angle и Horizon, а 3Д модель на вкладке Setup перестанет двигаться. Еще одна причина по которой отключают эту функцию — чтобы избежать проблем при арминге коптера, если он сильно наклонен.
Отключите Barometer и Magnetometer, они нам не нужны, т.к. мы летаем на миникоптере.
3. Раздел Personalization
Craft name — название коптера, это значение будет отображаться на экране при помощи Betaflight OSD.
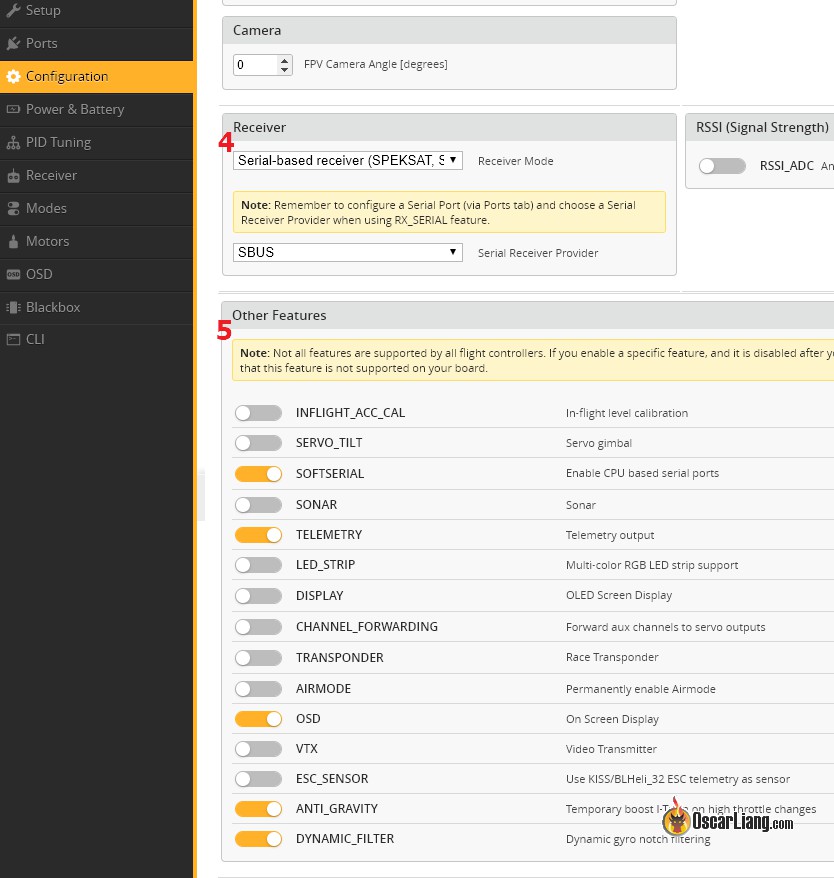
4. Раздел Receiver
Если у вас приемник SBUS, IBUS или Spektrum Satellite, тогда выбирайте «Serial-based receiver» в выпадающем списке «Receiver Mode». В параметре Serial Receiver Provider нужно выбрать SBUS, т.к. у нас приемник FrSky.
Если приемник использует PPM, тогда выберите PPM RX Input в списке Receiver Mode.
5. Раздел Other Features
Обычно я включаю нижеуказанные функции Betaflight. Если вы не уверены в том, нужны ли они, просто оставьте значения по умолчанию, они не помешают первому полету.
- Anti-Gravity
- Dynamic Filter
- Telemetry (чтобы работала SmartPort телеметрия)
- OSD (если ваш ПК поддерживает Betaflight OSD)
Нажмите Save & Reboot.
Вкладка Receiver
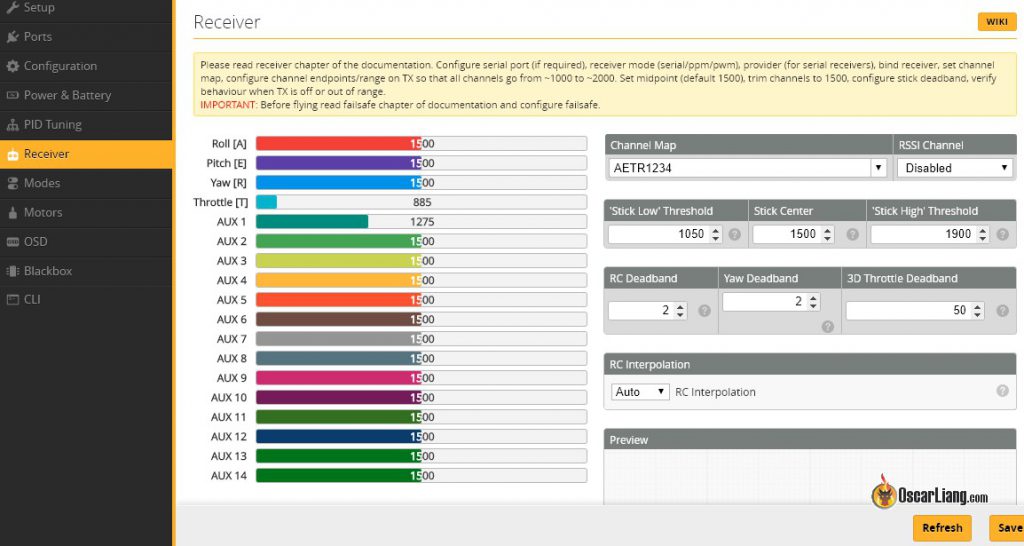
Тут мы проверяем, что приемник работает правильно.
Включаем аппаратуру управления и приемник, двигаем стики по одному и наблюдаем как меняются значения в соответствующих каналах. Если меняются не те каналы, тогда нужно поменять их порядок в параметре «Channel Map«.
Если ни один из каналов не работает, тогда начинаем искать проблему:
- приемник привязан к передатчику (забинден)? На приемнике должен гореть зеленый светодиод
- приемник правильно подключен/припаян к полетному контроллеру?
- уверены, что Serial RX включили на нужном порту?
- уверены, что правильно выбрали протокол?
После того как убедитесь, что все каналы работают правильно, проверьте значения в средних и крайних точках в первых четырех каналах (Pitch, Roll, Yaw, Throttle, т.е. тангаж, крен, рысканье и газ). В центральном положении эти каналы должны иметь значение 1500, а крайние значения 1000 и 2000.
Если у вас другие значения, тогда читайте вот это руководство по настройке центральных и конечных точек.
Вкладка Modes
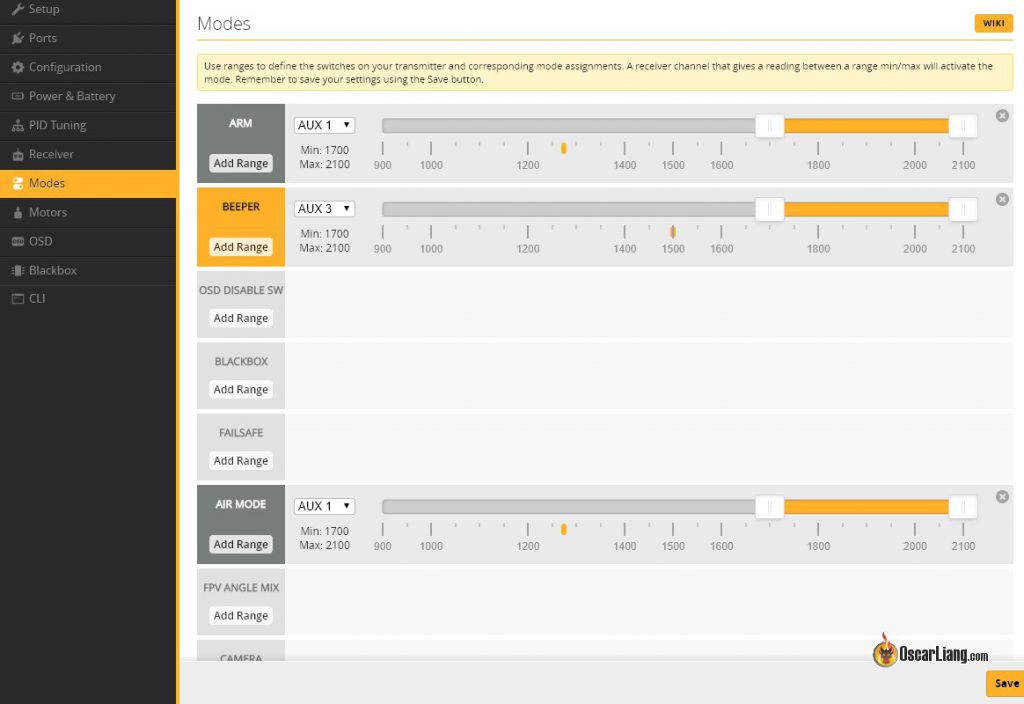
Тут мы настраиваем полетные режимы и их активацию при помощи дополнительных (AUX) каналов управления (тумблеры на аппаратуре управления):
- Arming (арминг, включение коптера/моторов)
- Airmode (управляемость коптера при 0 значении газа)
- Angle mode (режим полета без автовыравнивания)
- Beeper (пищалка)
Я предпочитаю активировать Airmode тем же тумблером что и арминг коптера, а не отдельным, но это дело вкуса.
Вкладка Motors
Проверим порядок моторов:
- мотор 1 — сзади справа
- мотор 2 — спереди справа
- мотор 3 — сзади слева
- мотор 4 — спереди слева
Если у вас другой порядок моторов, тогда его нужно поменять при помощи переназначения ресурсов (Resource Remapping).
Подробная инструкция по переназначению ресурсов
Теперь проверьте направление вращения моторов, его можно поменять в BLHeliSuite.
Инструкция: подключаем BLHeliSuite (конфигуратор для регуляторов скорости) через полетный контроллер
Вкладка OSD
Вот подробная инструкция по настройке Betaflight OSD
Вкладка PID Tuning
Для первого полета здесь ничего менять не нужно. Но настройка ПИД коэффициентов и рейтов может помочь летать лучше.
ПИД — это по сути 3 коэффициента для каждой оси: крен (roll), тангаж (pitch) и рысканье (yaw). Настройка этих коэффициентов подразумевает, что вы понимаете, как они влияют на летные характеристики.
Вот моё руководство по настройке ПИД (англ).
Rate, Super Rate и Expo — определяют то, как резко коптер будет реагировать на движение стиков.
Руководство по настройке Rate, Super Rate и Expo
Заключение
Это все базовые настройки Betaflight. Приятных полетов.
Betaflight configurator, настройка на русском. После сборки всех компонентов квадрокоптера, нужно прошить мозг (полетный контроллер) и регуляторы оборотов специальной программой — это Betaflight и BLHeli.
О том, как просто прошить квадрокоптер и ESC, читайте в нашей статье: Как прошить полетный контроллер и ESC BLhelli. Прошивка квадрокоптера
Читайте также: Как и где скачать Betaflight Configurator и BLHeli
В этой же статье, мы будем рассматривать структуру конфигуратора Betaflight и то, что в нем можно настроить.
Прошить — это загрузить программное обеспечение в устройство. Без прошивки ваш дрон никуда не полетит. Трудность настройки в том, что у прошивки сотни различных настроек для всех типов полетов и под конкретные нужды.
Цель этой статьи — помочь начать с минимального набора функций, необходимых для начала полета. Если вы впервые сталкиваетесь с прошивкой квадрокоптера, то эта инструкция для вас. Для начала, сделайте базовые настройки, чтобы просто начать летать, и уже потом, в процессе, начинайте делать остальные настройки.
В этой статье мы будем рассказывать о Betaflight Configurator версии 10.7 и на основе прошивки Betaflight 4.1.6, хотя есть уже и 4.2. Если у вас другая прошивка, например, CleanFlight, то не все тут будет совпадать с вашей прошивкой, так что, рекомендую все же прошить свой квадрокоптер в Betaflight, так как это самое популярное ПО для дронов, к тому же, часто обновляется.
Резервное копирование
Перед любыми настройками в конфигураторе, делайте полный бекап (резервную копию) кнопкой «Сохранить» на главной странице Betaflight. В случае проблем, вы сможете загрузить ее и все вернуть «как было». С помощью этой кнопки, делается полный бекап. Другие виды бекапов можно делать через командную строку (CLI), об этом читайте здесь: CLI: командная строка Betaflight — как сделать бекап и посмотреть настройки, а также команды
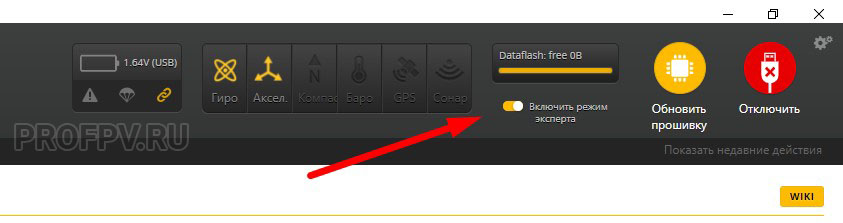
Включите режим эксперта
Флажок «Включить режим эксперта» был сделан для того, чтобы не показывать функции, которые многие пилоты никогда не будут использовать, хотя, скорее всего это сделано для новичков, чтобы они не терялись, им будет доступен минимальный набор важных функций для настройки. Но вы явно уже не совсем новичок, раз читаете эту статью. Поэтому, рекомендуем вам включить режим эксперта:
Содержание
- Порты
- Конфигурация
- Приемник и аппаратура управления
- Режимы
- Failsafe
- PID-настройки
- Вкладка Blackbox
- Моторы
- Питание и батарея
- OSD
- Командная строка (CLI)
- Рекомендации: проверка безопасности
- Заключение
Порты
На этой вкладке находятся настройки для UART-портов, то есть, для последовательных портов, которые используются для обмена данными с различными компонентами, такими как приемник, видеопередатчик, GPS-модуль и так далее. USB VCP всегда включен, это тот порт, в который вы вставляете провод, microUSB.
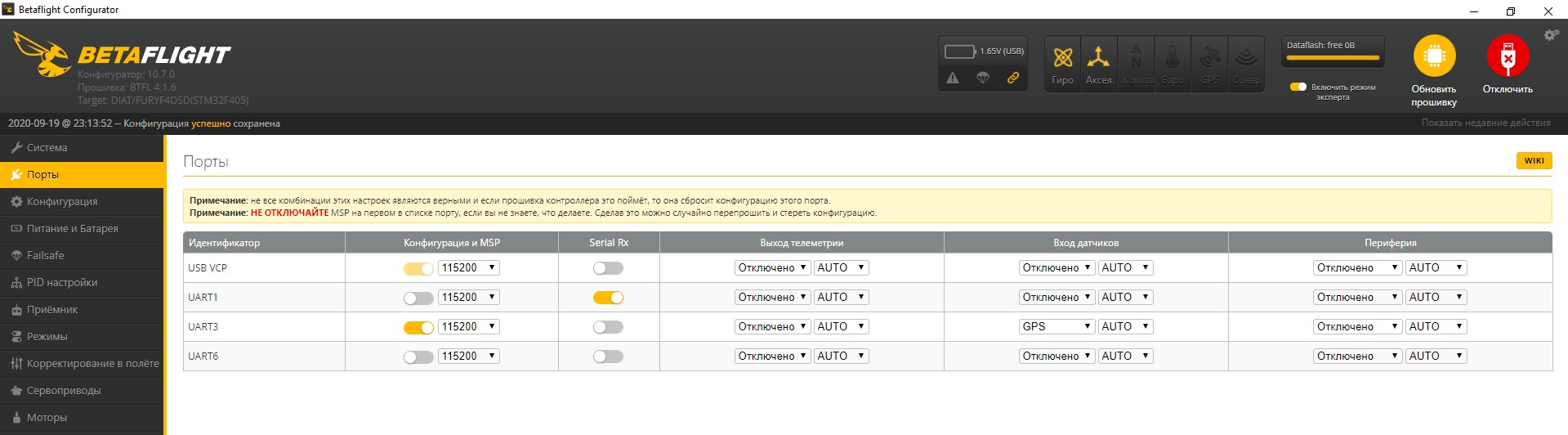
В этом разделе обязательно нужно включить порт, который используется для обмена информацией с приемником. У различных полетных контроллеров он может быть разным, у нас Mamba F405 и у него порт для приемника — UART1. Поэтому включен ползунок на Serial Rx. Вам нужно посмотреть документацию к своему полетному контролеру, чтобы точно знать, какой порт включать для приемника.
Узнайте больше о портах из документации Betaflight Serial.
Конфигурация
На этой вкладке выполняются базовые настройки, такие как протокол связи полетного протокола с регуляторами оборотов, протокол связи приемника с полетным протоколом, расположение платы и многое другое.
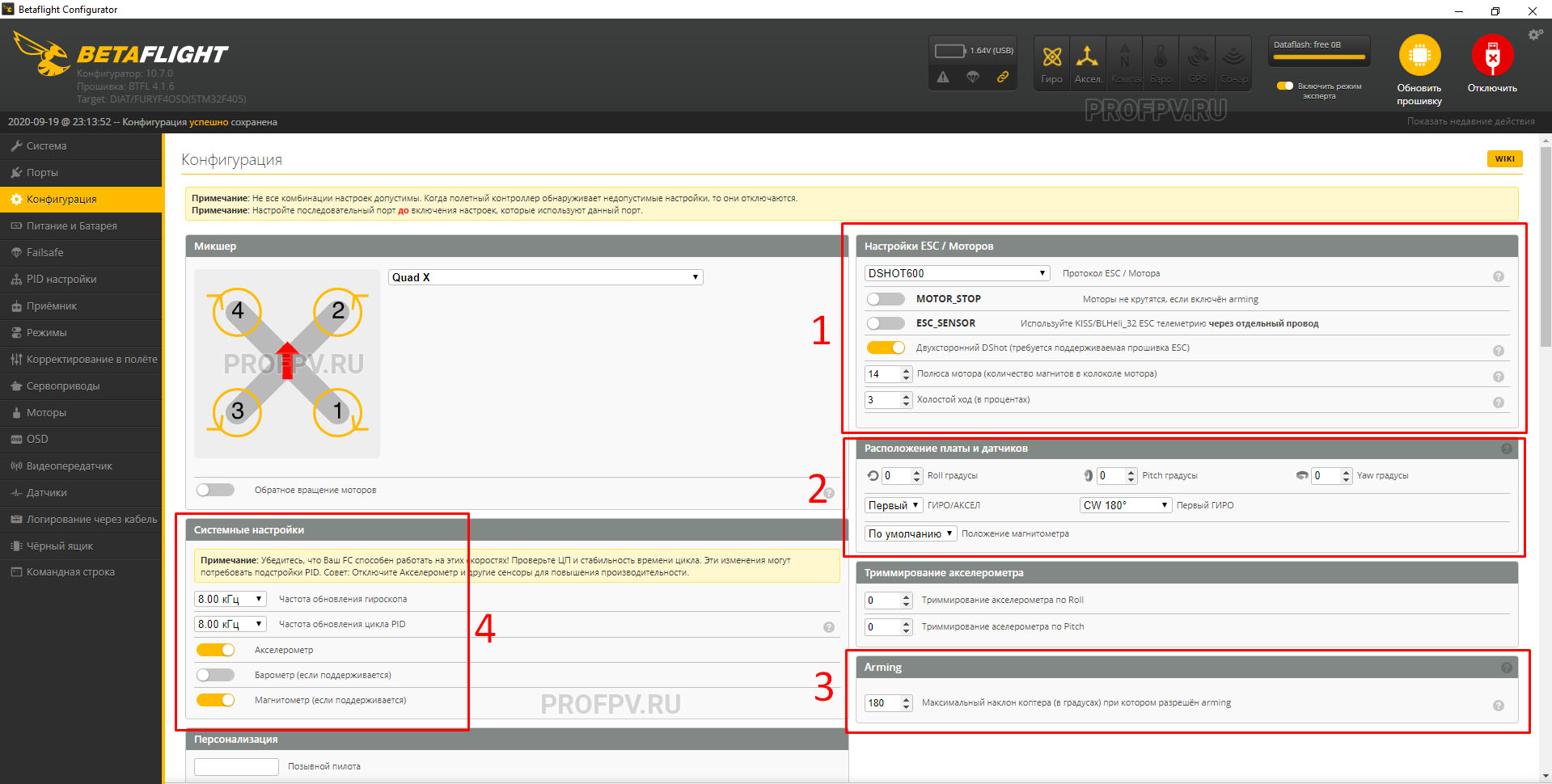

- Настройки ESC/Моторов.
В этом блоке настраиваются протокол и двигатели.
DSHOT600 — это протокол на котором будут общаться регуляторы оборотов и полетный контроллер. Все современные ESC и ПК поддерживают DSHOT300, DSHOT600 и DSHOT1000 (есть и DSHOT1200). Выбирайте тот, который рекомендует производитель (такое всегда написано у продавца в товаре).
MOTOR-STOP — тут все понятно, после включения дрона (арминг) двигатели не будут крутиться. Обычно функцию не включают, так как нужно контролировать работу двигателей.
ESC_SENSOR — используется для включения телеметрии, если на ваших регуляторах для этого используется отдельный сигнальный провод.
Двухсторонний Dshot (на самом деле правильно Двунаправленный). Об этом читайте в этой статье: Двунаправленный (Bidirectional) DSHOT и RPM-фильтрация.
Полюса моторов — обязательно посчитайте количество магнитов в колоколе и напишите цифру в этом окошке.
Холостой ход — это то, с какой скоростью будут крутиться пропеллеры после арминга (включения). Обычно хватает 2-4%. - Расположение платы и датчиков.
В этом блоке обычно настраивается только «Первый ГИРО». Производители всегда ставят порт USB где-нибудь сбоку и пилот конечно же поставит плату полетного контроллера так, чтобы было удобно подключать провод. В этом случае, есть большой шанс, что Betaflight будет показывать модельку неправильно, то есть, вы наклоняете перед дрона вперед, а моделька наклоняется вправо. Чтобы это исправить, используется вот такой виртуальный поворот платы. - Arming.
Максимальный наклон коптера. Если будет стоять маленькое число, то у вас дрон будет запускаться только на идеально ровной площадке. Поставьте 180 градусов, тогда дрон можно будет запустить хоть боком. - Системные настройки.
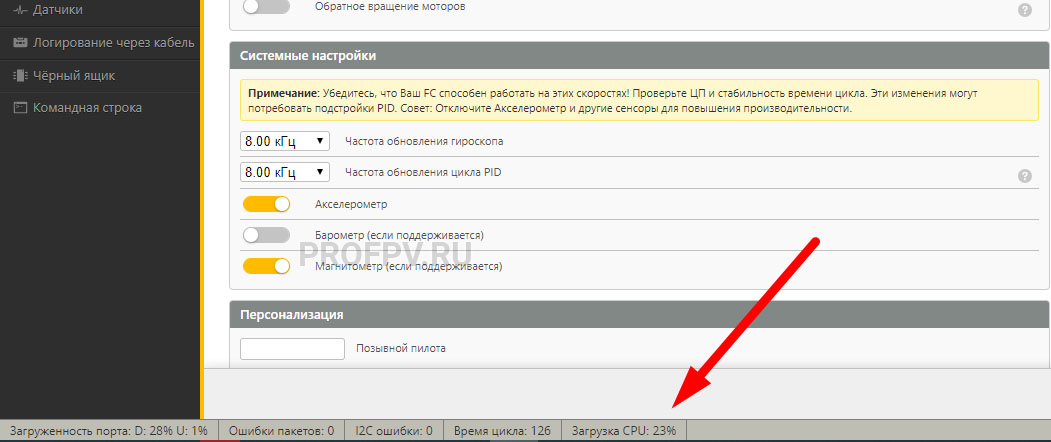
Здесь выбирается частота обновления вычислений гироскопа и цикла PID, чем они больше, тем чище будет лететь квадрокоптер в воздухе, но нужно следить, чтобы у процессора был запас для дополнительной работы, эта строчка показывается в самом низу программы:
Как видите, в нашем случае загрузка при максимальных частотах всего 23-25%.
В этом блоке также включаются датчики полетного контроллера, в нашем случае включен Акселерометр и Магнитометр.
Акселерометр включает и отключает автоматическую стабилизацию квадрокоптера.
Барометр включает и выключает функцию удержания высоты.
Магнитометр — это компас, позволяет удерживать дрон в одном направлении. В гоночных не используется, но на скрине включен для эксперимента.
Их не включают только в некоторых случаях, но вам точно надо их включить. Барометра в нашем ПК нет, поэтому он отключен. - Приемник.
Здесь выбирается режим работы, в нашем случае выбран режим с последовательной передачей данных и протоколом SBUS. В зависимости от производителя, у вас будет свой выбор, например, у FrSky используется SBUS, а у FlySky — IBUS. Ниже таблица соответствия бренд/протокол:
Название аппаратуры Serial Receiver Provider DSM2 Satellite SPEKTRUM1024 DSMX Satellite SPEKTRUM2048 FrSky RX SBUS Futaba RX SBUS FlySky RX IBUS Turnigy RX IBUS Подробнее об этом можно прочитать на Гитхабе: https://github.com/martinbudden/betaflight/blob/master/docs/Rx.md
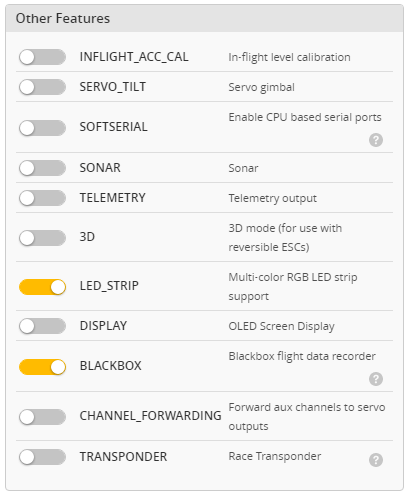
- Прочий функционал.
Как понятно из названия, здесь можно включить или отключить разные функции. На стандартном квадрокоптере, обычно включены:
TELEMETRY — чтобы была возможность принимать телеметрию;
AIRMODE — это ручной режим управления, без стабилизации. Включается, чтобы не было необходимости включать его тумблером, у опытных пилотов всегда включен, вы можете на время отключить.
OSD — чтобы в вашем шлеме или очках показывалась различная телеметрия, такая как, заряд аккумулятора, время и так далее;
DYNAMIC_FILTER — это новый фильтр, который появился не так давно. Позволяет дрону летать более стабильно.И для общего ознакомления об остальных:
INFLIGHT_ACC_CAL: Функция для долголетов, которые летают более 20 минут. Функция позволяет время от времени калибровать акселерометр. На гоночных и мини квадрокоптерах он калибруется при подключении аккумулятора.
SERVO_TILT: Функция включает сервопривод, которым можно в процессе полета регулировать наклон fpv камеры. Скорее всего у вас такого привода не будет.
SOFTSERIAL: Если вы будете подключать много компонентов по UART.
SONAR: Включает поддержку сонарных датчиков, например, датчик высоты.
LED_STRIP: управление LED-светодиодными лентами, настраиваются во вкладке “LED Strip”. Если нет таких лент, отключаем.
DISPLAY: Для подключения LED-дисплеев к квадрокоптеру.
CHANNEL_FORWARDING: Если вы хотите управлять сервоприводами через каналы RC AUX channels (каналы 5-16). После включения, каждый канал надо будет настроить.
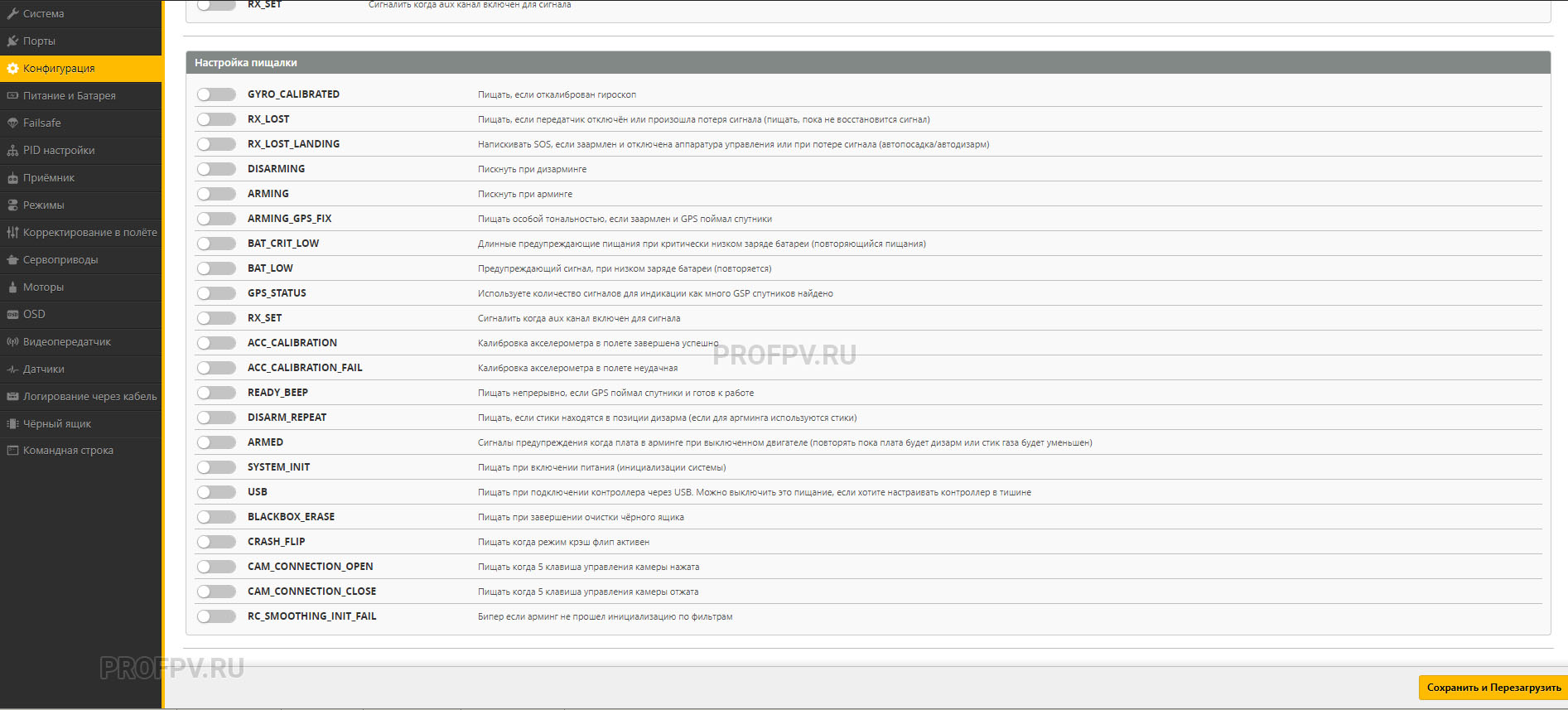
TRANSPONDER: для подключения транспондера, это такая штука, которая пишет время, засекает его, секундомер. - Еще ниже есть блок Настройка пищалки. Здесь целая куча настроек, это все делается на ваш вкус:

После всех настроек, не забывайте нажимать кнопку «Сохранить и Перезагрузить» в нижнем правом углу, иначе у вас не сохранятся настройки.
Приемник и аппаратура управления
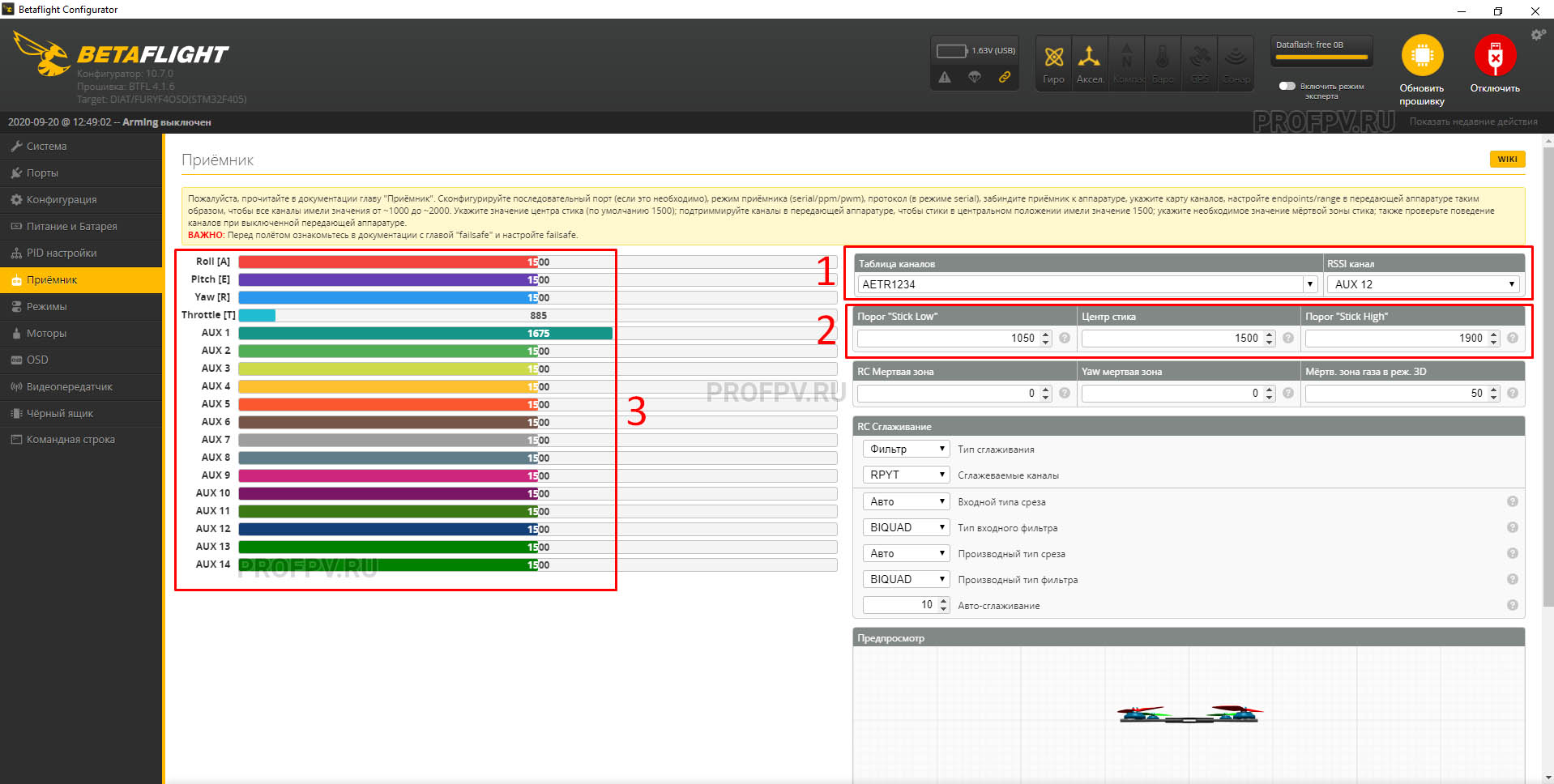
После настройки конфигурации, переходим к настройке раздела Приемник, здесь настраивается аппаратура управления.
- Если вы летаете с помощью аппаратуры Taranis, FlySky, Turnigy или Spektrum, то вам нужно выбрать во вкладке “Таблица каналов” нужный пункт: “JR / Spektrum / Graupner” или «FrSky, Hutaba, Hitec», как в нашем случае и у вас автоматически вставится таблица AETR1234. После чего нажмите кнопку сохранить. Какую именно строчку нужно выбрать, написано в инструкции вашего пульта.
Видите слева таблицу с цветными полосками? Буквы в квадратных скобках соответствуют таблице работы вашей аппаратуры, то есть, на пульте 2 стика, у левого: газ [Т] и поворот по своей оси [R], у правого наклон вперед/назад [A] и вправо/влево [E]. Таблицу можно менять в настройках аппаратуры и для каждого действия привязать свою букву. - Пороги. Здесь прописывается цифровое значение стиков в крайнем нижнем положении и в крайнем верхнем положении, а также по центру. Настройка применяется для калибровки положения стиков на вашей аппаратуре. Значения по умолчанию обычно не требуют изменения.
- Включите свой пульт и двигайте стики в разные стороны, разноцветные полоски будут бегать в разные стороны, от 1000 до 2000, а среднее положение, когда вы отпускаете стики, должны быть на отметке 1500 +- 1-2 единицы, но лучше чтобы было точно 1500. Потому что эти 2 градуса будут вносить свои коррективы в полете, а если будет 5, то вообще будет заметно. Если у вас не 1500, а немного другое, попробуйте подвигать в разные стороны число в поле RC Deadband, это мертвая зона. Если не получается, можно попробовать настроить сам пульт, для этого читайте инструкцию к своей аппаратуре.Лучше всего использовать для этой настройки маленькие кнопки по бокам стиков, называются они Trim (подрезка). Пощелкайте несколько раз нужной кнопкой подрезки, чтобы отрегулировать среднее значение до 1500 пунктов:

Также, можно поправить это все с помощью командной строки CLI.
Заходите в этот раздел. Перед этим, копируете этот код:rxrange 0 981 2005
rxrange 1 987 2011
rxrange 2 972 1996
rxrange 3 987 2011
Сначала копируем и вставляем (не забудьте сначала сделать бекап на первой странице) эти строки в командную строку и нажимаем Enter, сохраняем, переходим во вкладку Приемник и смотрим, какие у нас числа, если в первой строке 1505, то в строке «rxrange 0 981 2005» меняем числа на такие «rxrange 0 976 2000», т.е. сдвигаем оба числа на равное количество пунктов и таким образом корректируем все значения, чтобы везде было 1500. Так обычно никто не делает, но это работает.
Режимы
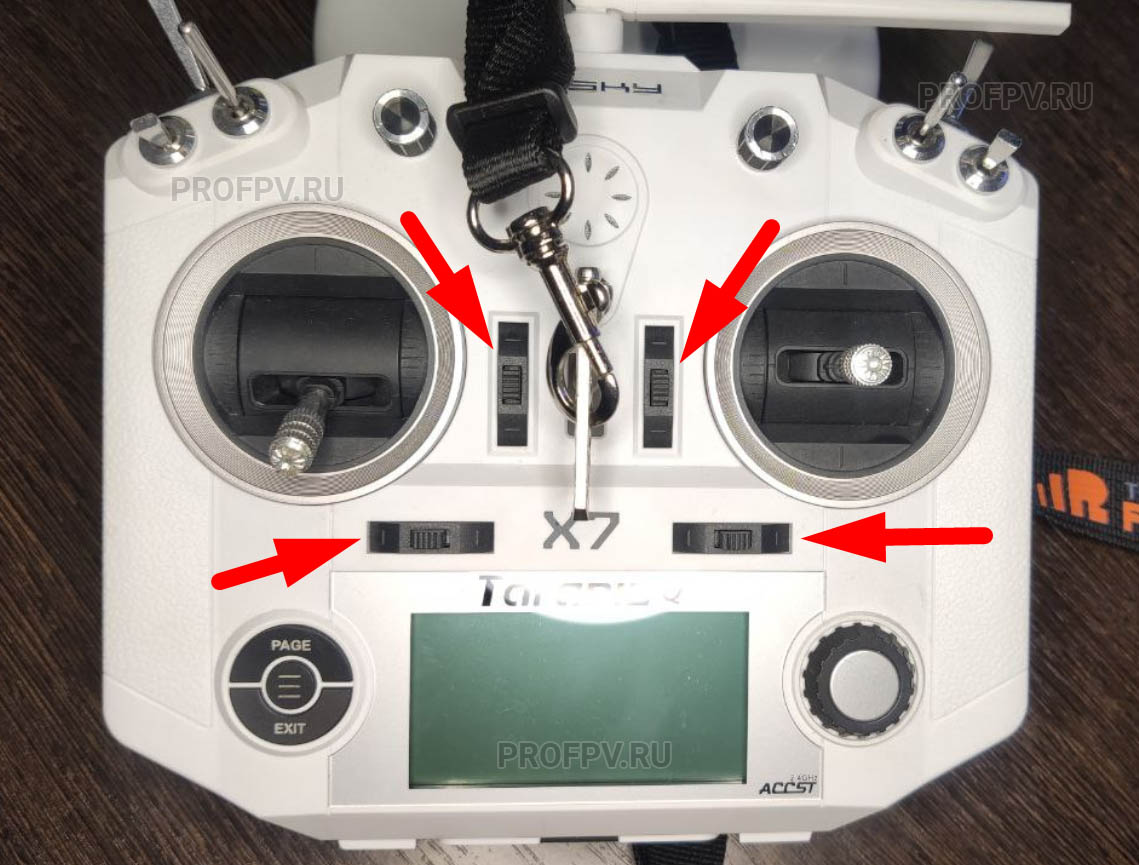
Этот раздел сделан для настройки разных тумблеров и крутилок на пульте управления.
Мы будем настраивать 2 стика:
- Арминг — поставнока и снятие с охраны квадрокоптера;
- Включение режима стабилизации и АКРО режим (ручной режим управления).
Чтобы назначить тумблеру действие, делаем следующее:
- Наводим мышь на ARM и жмем «Добавить диапазон»;
- Выбираем канал AUX1, например, либо можете оставить «АВТО» и щелкнуть любым удобным тумблером, автоматически будет выбран канал, который привязан к этому тумблеру (каждому тумблеру в пульте нужно привязать свой канал, как это делать, смотрите в видео (на английском, но все понятно):
После того, как выбрали AUX, пощелкайте тумблером. На ваши действия, по полоске будет «бегать» желтая точка, она соответствует положению тумблера. Если переместить желтые полоски на область , где будет находиться желтая точка, то квадрокоптер начнет реагировать на это положением, в нашем случае это арминг или снятие с охраны. - Нажмите «Сохранить».
Теперь, когда вы переведете этот тумблер, моторы дрона начнут вращаться с маленькой скоростью, дрон будет снят с охраны. Это называется «Заармить».
Так как на странице Конфигурация был включен ползунок на AIRMODE, квадрокоптер сейчас находится в ручном режиме без стабилизации, то есть, в режиме АКРО.
Режим ANGLE это режим стабилизации. Его назначаем на другой тумблер. Обычно эти 2 режима назначают на один тумблер у которого 3 позиции, то есть, на вторую позицию настраивают ARM и АКРО, а на 3 позицию ANGLE режим, чтобы они не накладывались друг на друга и в случае чего, вы просто переведете в верхнее положение тумблер, чтобы включилась стабилизация.
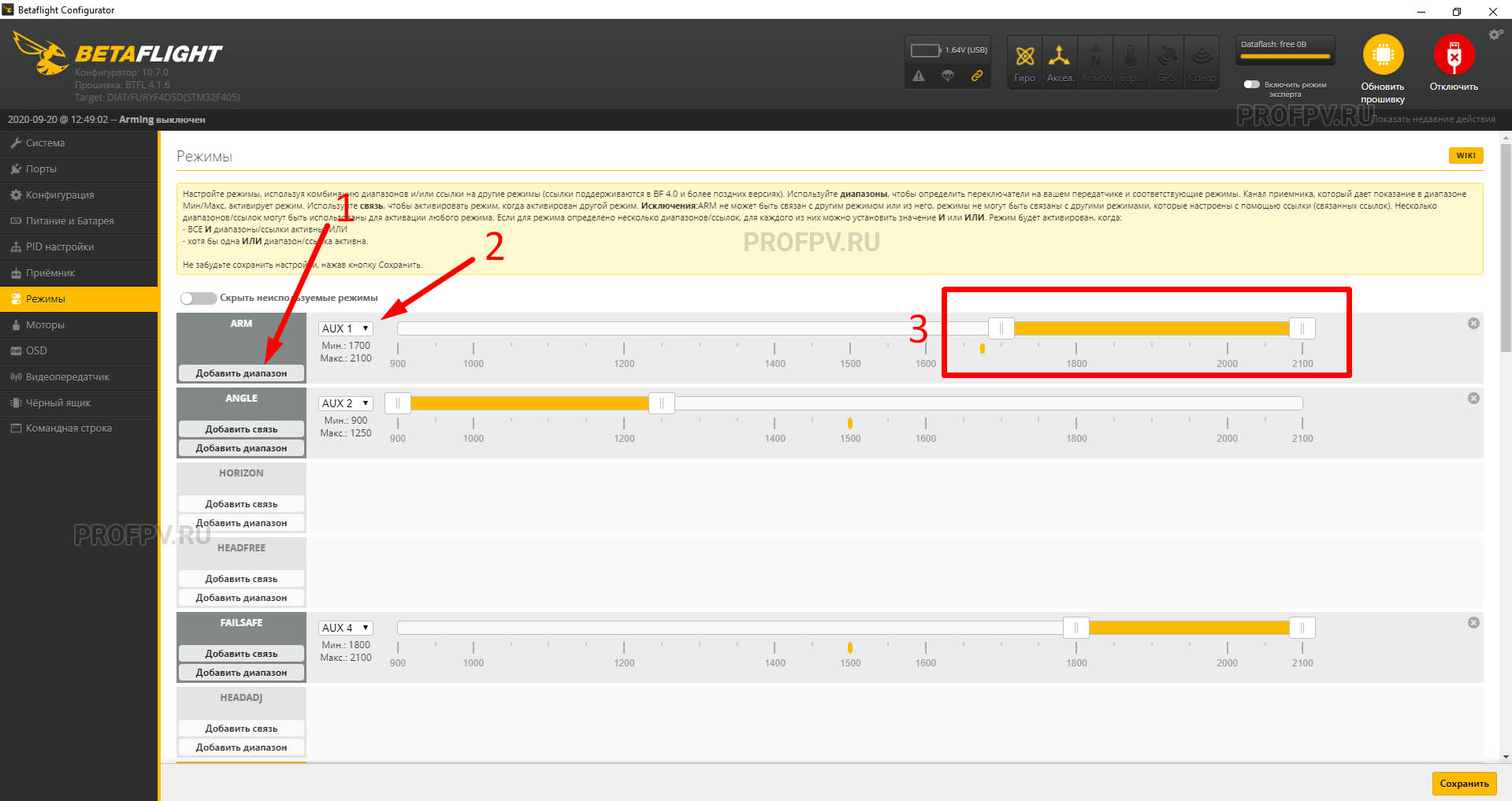
Failsafe
Режим сохранения, то есть, то, что будет делать квадрокоптер, если он потеряет связь с пультом управления.
Здесь есть 2 режима:
- Падение;
- Приземление;
- GPS спасение.
- Падение — если выбрать этот режим, то через секунду (настраивается в поле «Failsafe при низком значении газа, где стоит цифра 100) после потери сигнала, дрон отключит все двигатели и упадет.
- Приземление — при потере сигнала будет плавно приземляться, двигатели будут работать. Режим достаточно опасный, к тому же, нужно хорошо настроить обороты двигателей.
- GPS спасение — если вы установили на свой квадрокоптер GPS-модуль, то с его помощью можно настроить возврат квадрокоптера.
Если кратко, функция экстренная и созданная с целью вернуть управления квадрокоптером, а не его посадить, потому что нет дополнительных датчиков. Функция сработает, если вы улетите на расстояние не менее 50 метров (если не ошибаемся, то минимум можно установить 30 метров от точки взлета). Сажать дрон с помощью данного модуля не советуем, так как он ударит дрон о землю (нет других датчиков).
Вся задача модуля — в случае потери связи или, если вы засомневались в своих силах управления на дальнем расстоянии, активируете функцию GPS Rescue (либо она автоматически активируется), дрон поднимется на определенную высоту и полетит в ПРИМЕРНУЮ точку взлета. Главное, чтобы вы смогли перехватить управления на себя и не потерять/разбить дрон.
Обычно включают режим «Падение», так как с «Приземлением» непонятно где он будет приземляться с работающими винтами, а вдруг там будут люди?
Но если выбрали «Приземление», нужно настроить скорость вращения моторов, которые позволят плавно ему спускаться.
Блок «Failsafe переключатель» выполнит действие при активации тумблера, который присваивается функции на вкладке «Режимы». ПРи активации тумблера, выполнится сценарий Этапа 2.
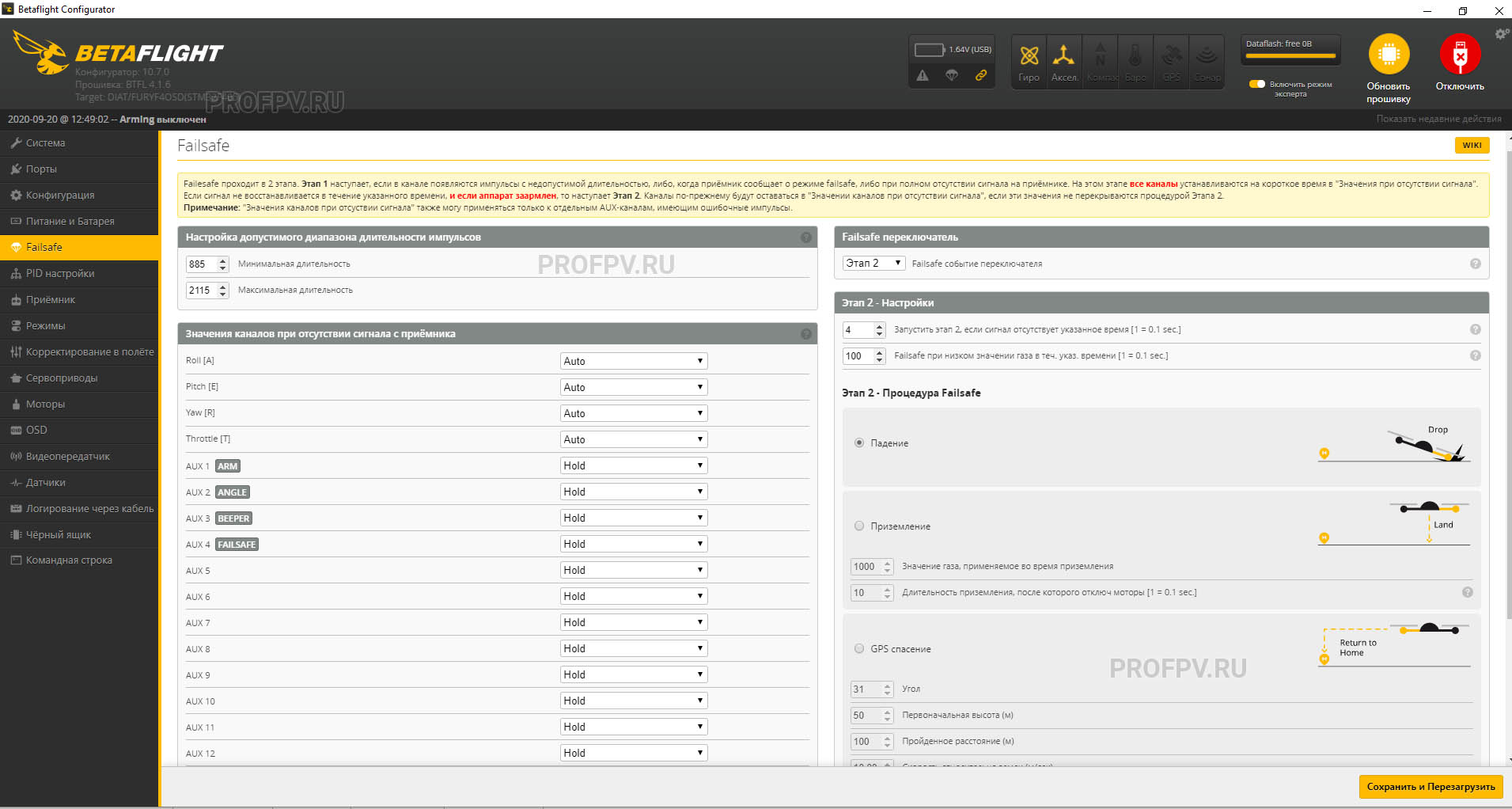
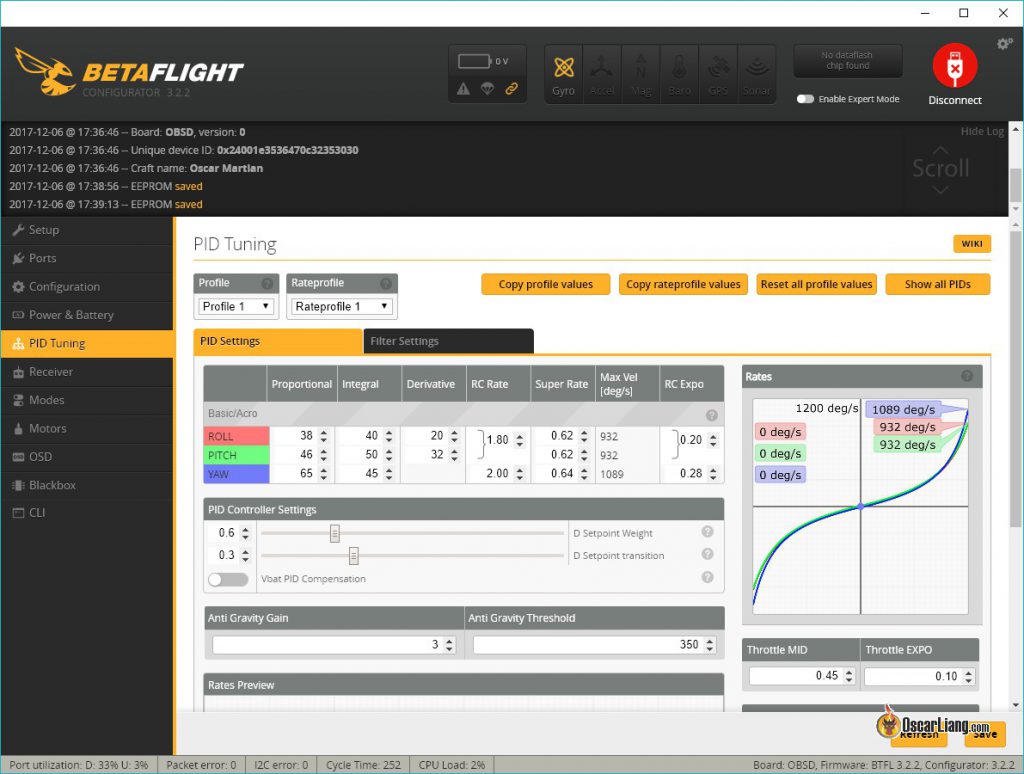
PID-настройки
Сложный раздел, в котором настройки производят далеко не все пилоты, за исключением очень увлеченных и профессионалов.
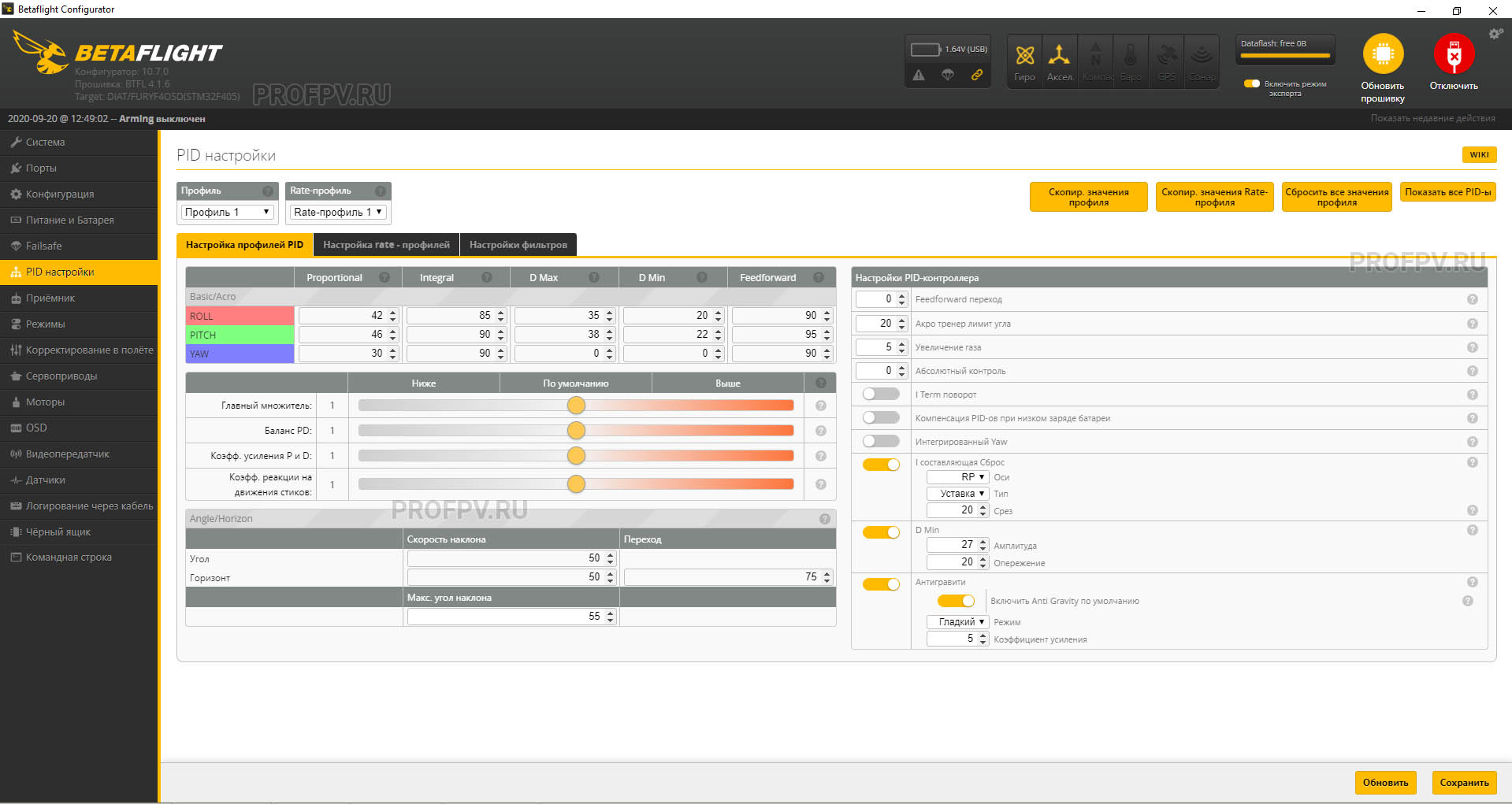
Углубляться в этой статье нет смысла, так как у нас есть несколько отдельных статей по этому разделу:
- PID — что это такое, как работает и принципы настройки
- Как настроить фильтры в Betaflight: описание всех фильтров + PID
- BLHeli_S RPM-фильтрация. Делаем лучшую PID-настройку для снижения вибрации
- Betaflight PID — настройка FeedForward, что это такое (Setpoint Weight и Setpoint Transition)
Подробнее о том, как настроить фильтры, можете почитать на официальной странице ГитХаба: https://github.com/betaflight/betaflight/wiki/Gyro-&-Dterm-filtering-recommendations.
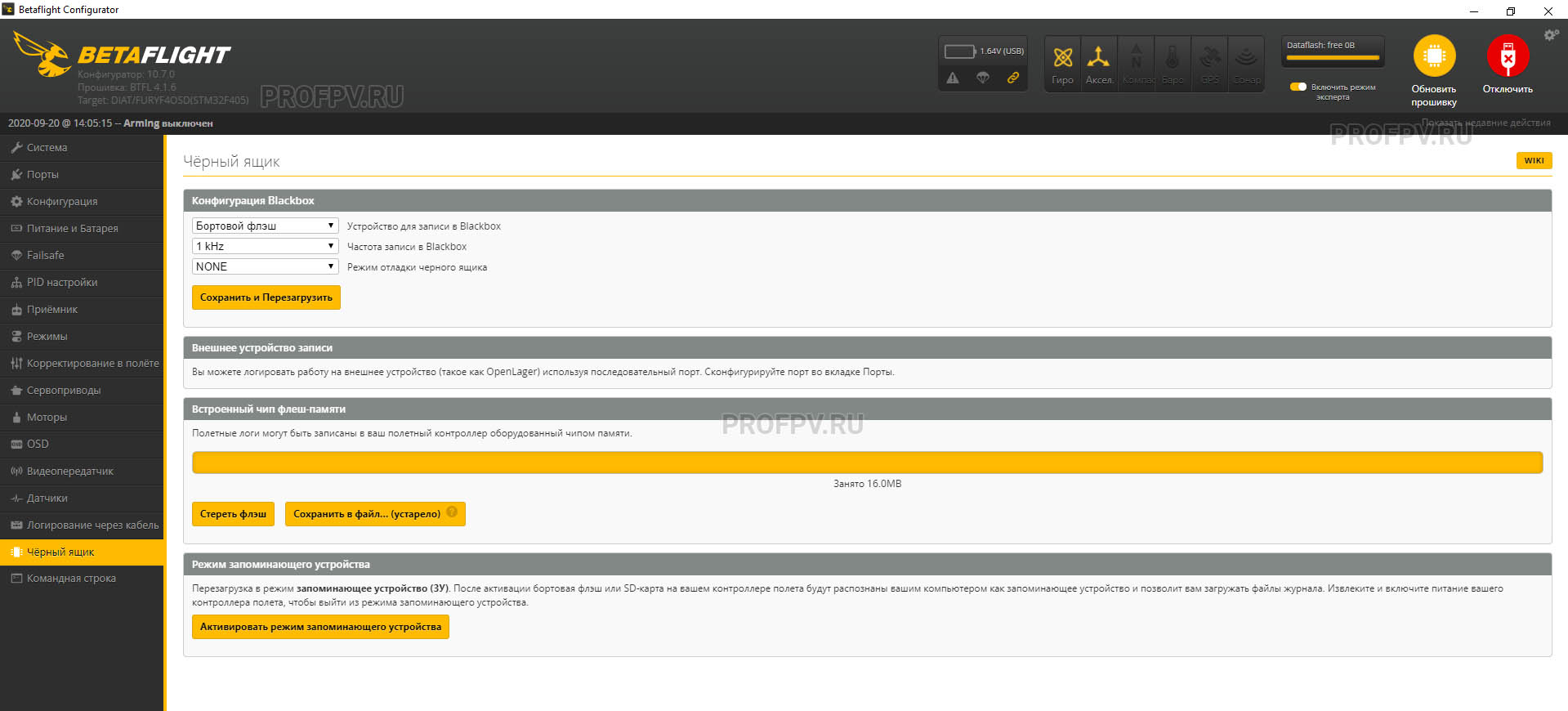
Вкладка Blackbox
Черный ящик нужно для того, чтобы записывать все данные полета — телеметрию. По мере того, как вы будете набираться опыта, журнал черного ящика будет вашим лучшим другом по настройке своего дрона. Blackbox по умолчанию включен. Данные будут писаться либо во встроенную флеш-память, либо на внешнюю SD-карту. Если у вашего полетного контроллера есть разъем, советуем подключить карточку и убедиться, что туда записываются данные черного ящика.
У всех современных полетных контроллеров есть своя память и это как минимум 16 мегабайт. Этого вполне хватит, чтобы записывать логи полета.
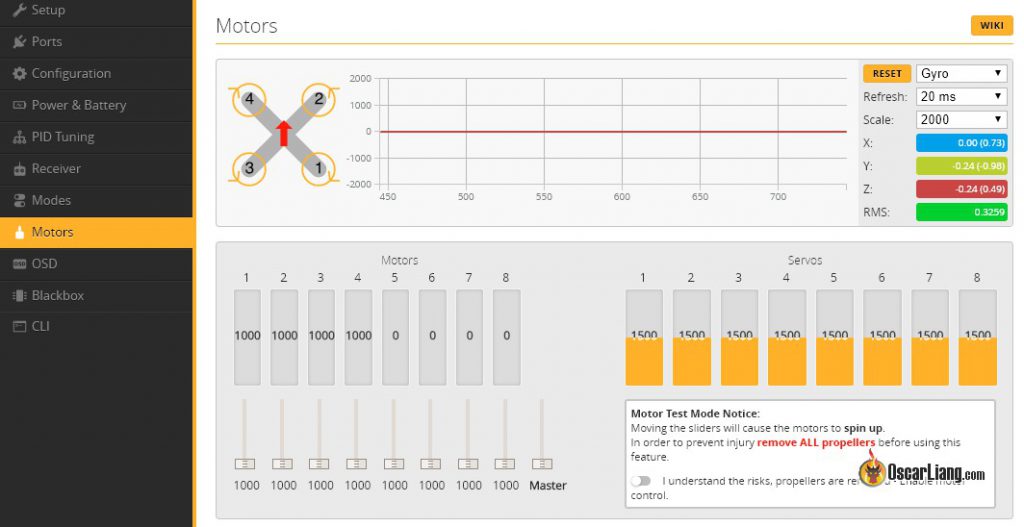
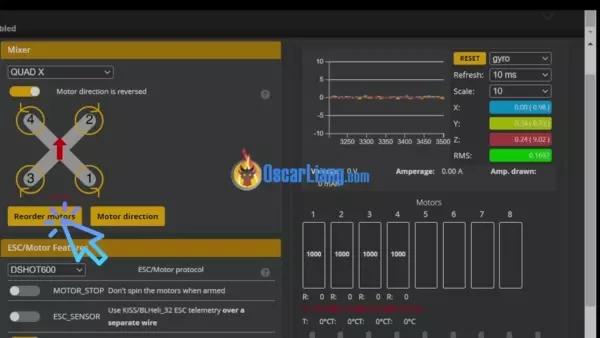
Моторы
На этой вкладке проверяется работоспособность двигателей:
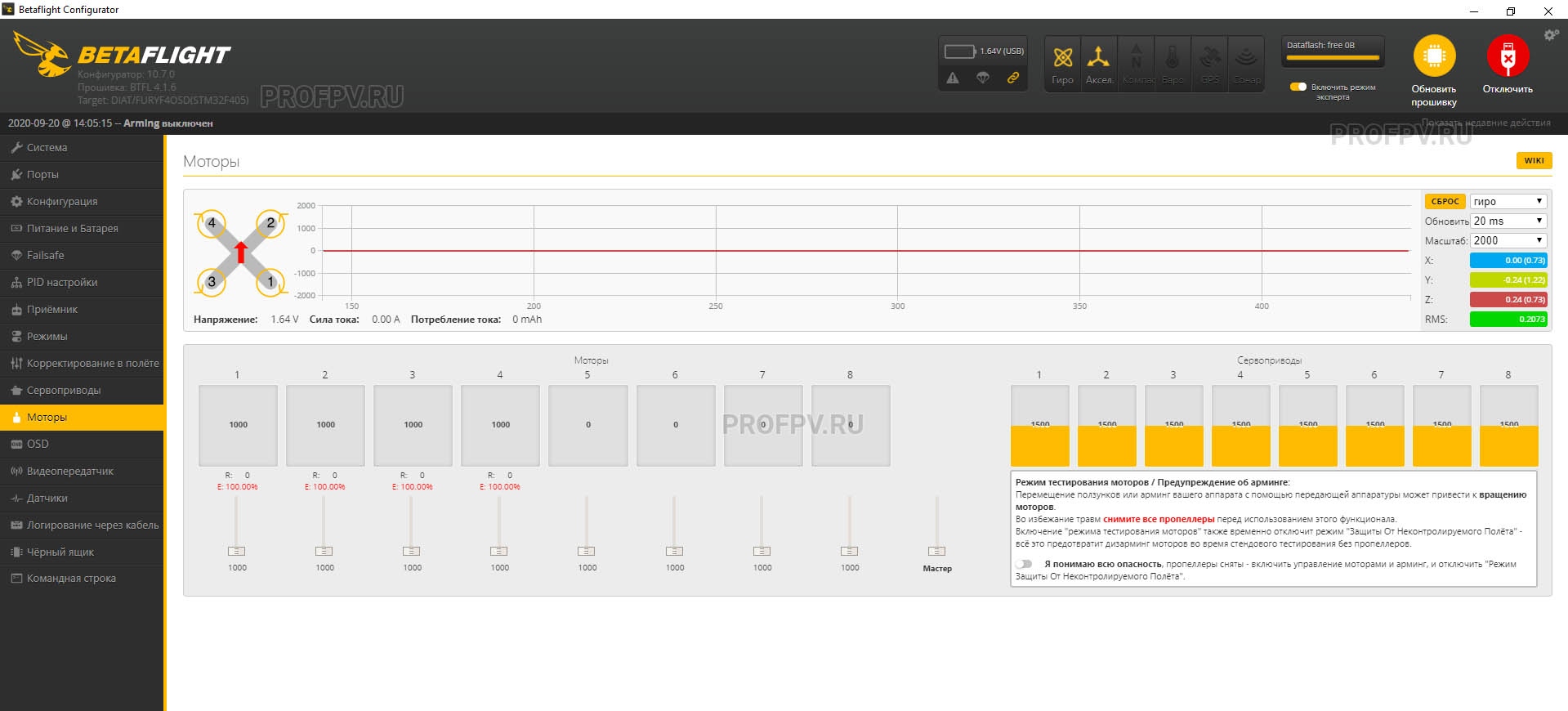
Перед любыми действиями, обязательно снимайте пропеллеры с двигателей!
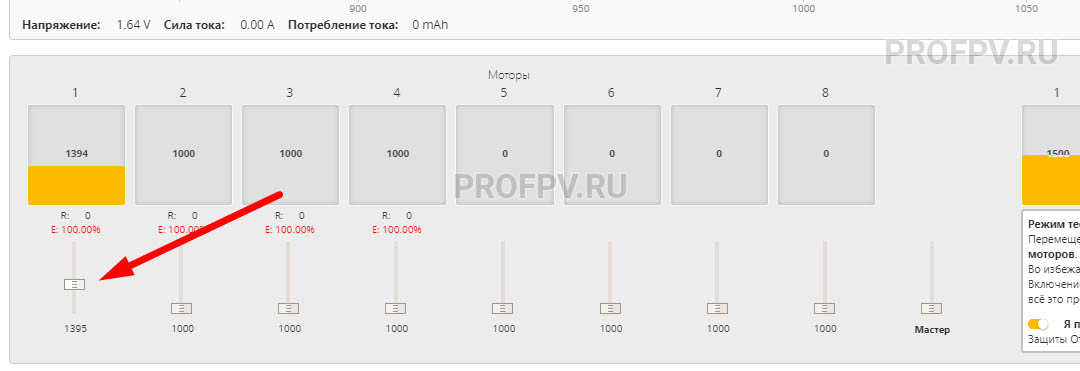
Перед тем, как покрутить двигатели ползунками, переключите флажок «я понимаю всю опасность», чтобы активировать функционал. Теперь можете подвигать ползунки, моторы начнут крутиться:
Чуть выше располагается график гироскопа, а также информация о том, сколько потребляют двигатели тока, а также силу и напряжение. Все это служит для проверки и настройки двигателей.
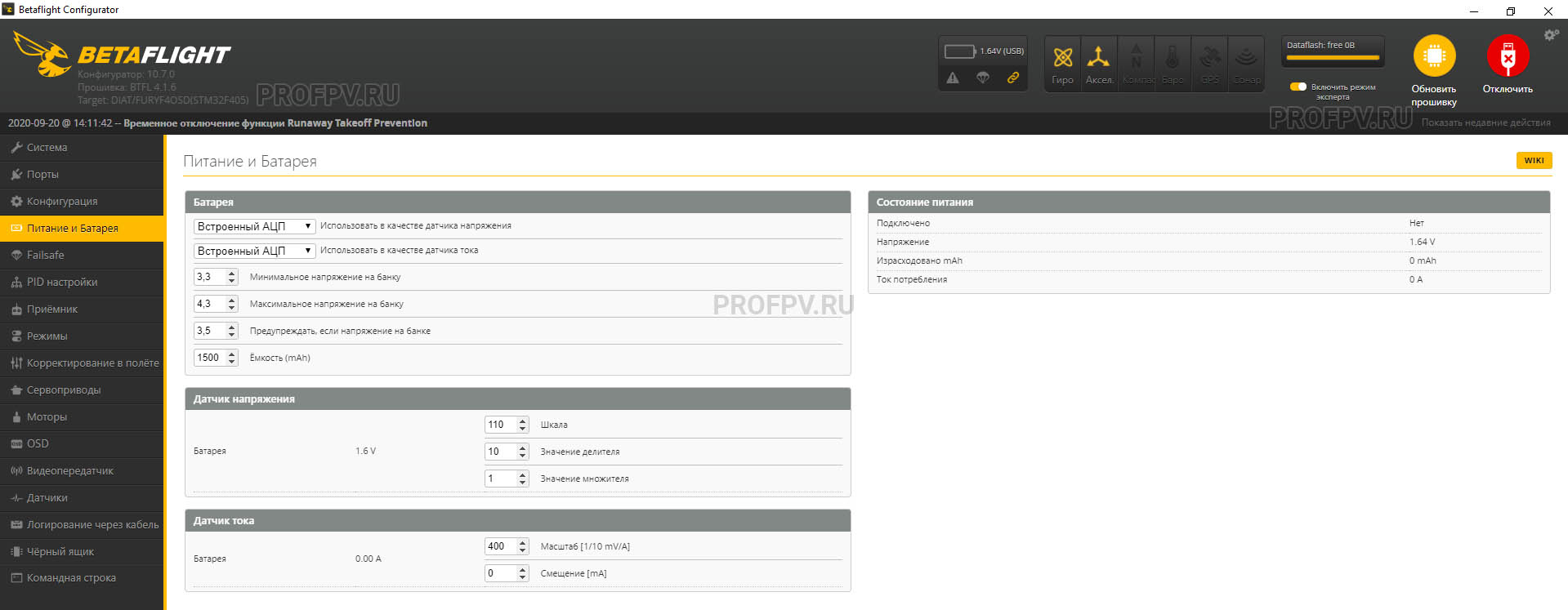
Питание и батарея
В этом разделе настраивается датчик тока, а также параметры аккумулятора. Все это нужно для того, чтобы квадрокоптер по OSD передавал актуальные и правильные данные об аккумуляторе, напряжении и токе во время полета.
У нас есть отдельная статья по этому блоку, рекомендуем к прочтению: Как откалибровать датчик тока и датчик напряжения в Betaflight
OSD
В этом разделе настраивается отображение различной информации на экране ваших очков или шлема. Очень полезный и нужный раздел, не пропускайте его.
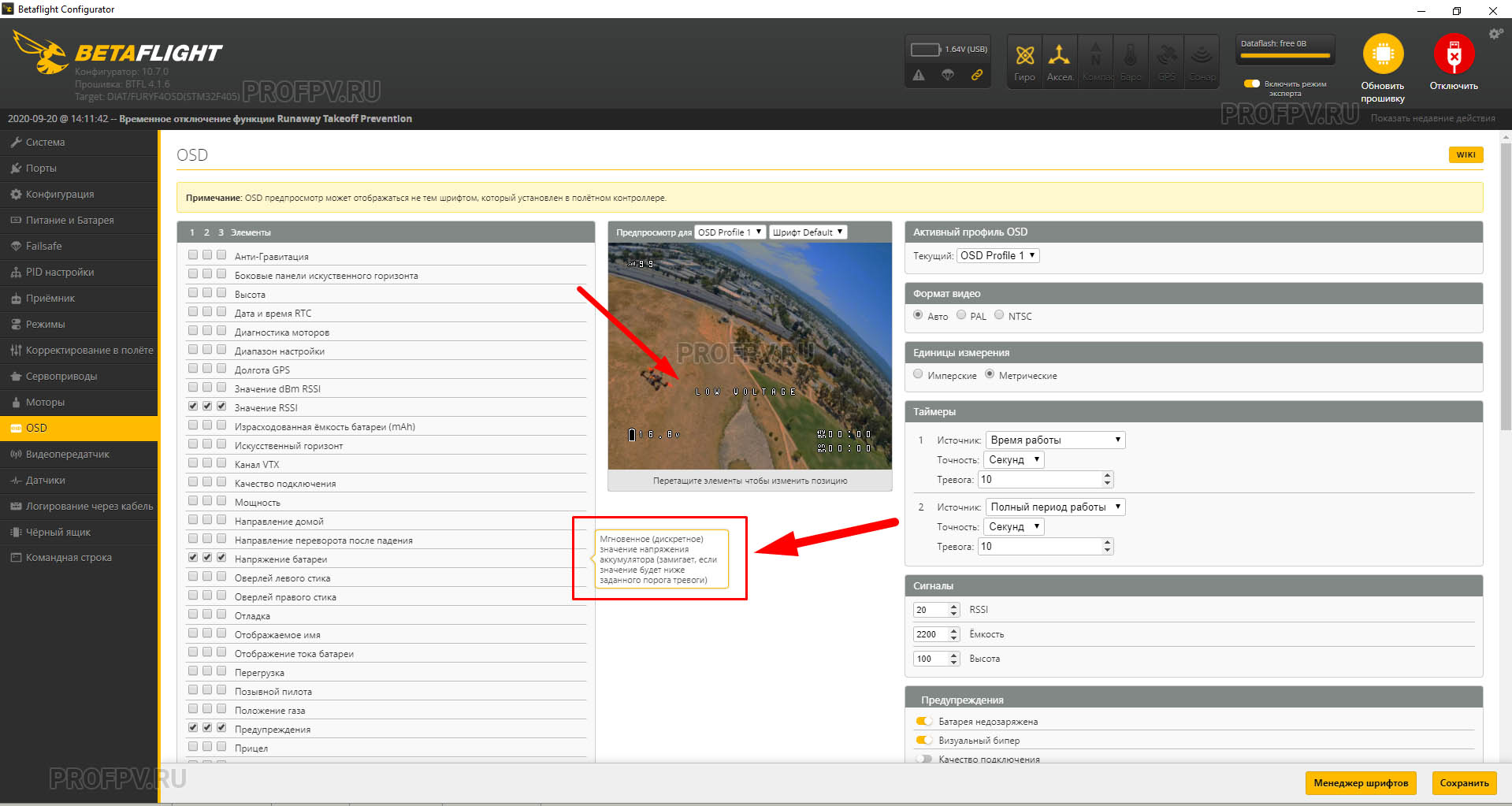
Настраивайте все атк, как вам хочется. По центру имитация экрана, там все можно двигать мышкой. Слева поставьте галки на нужном параметре, он появится на окне. Если не знаете, что конкретно означает параметр, наведите мышкой — появится подсказка того, что делает этот параметр.
В нашем случае, включено:
- RSSI (сила приема сигнала);
- Предупреждения;
- Заряд аккумулятора;
- Таймеры.
У нас добавлено 2 таймера, один это общее время работы, а второй — время полета.
Справа находятся еще некоторые общие настройки, это тоже настраивается по вашему желанию.
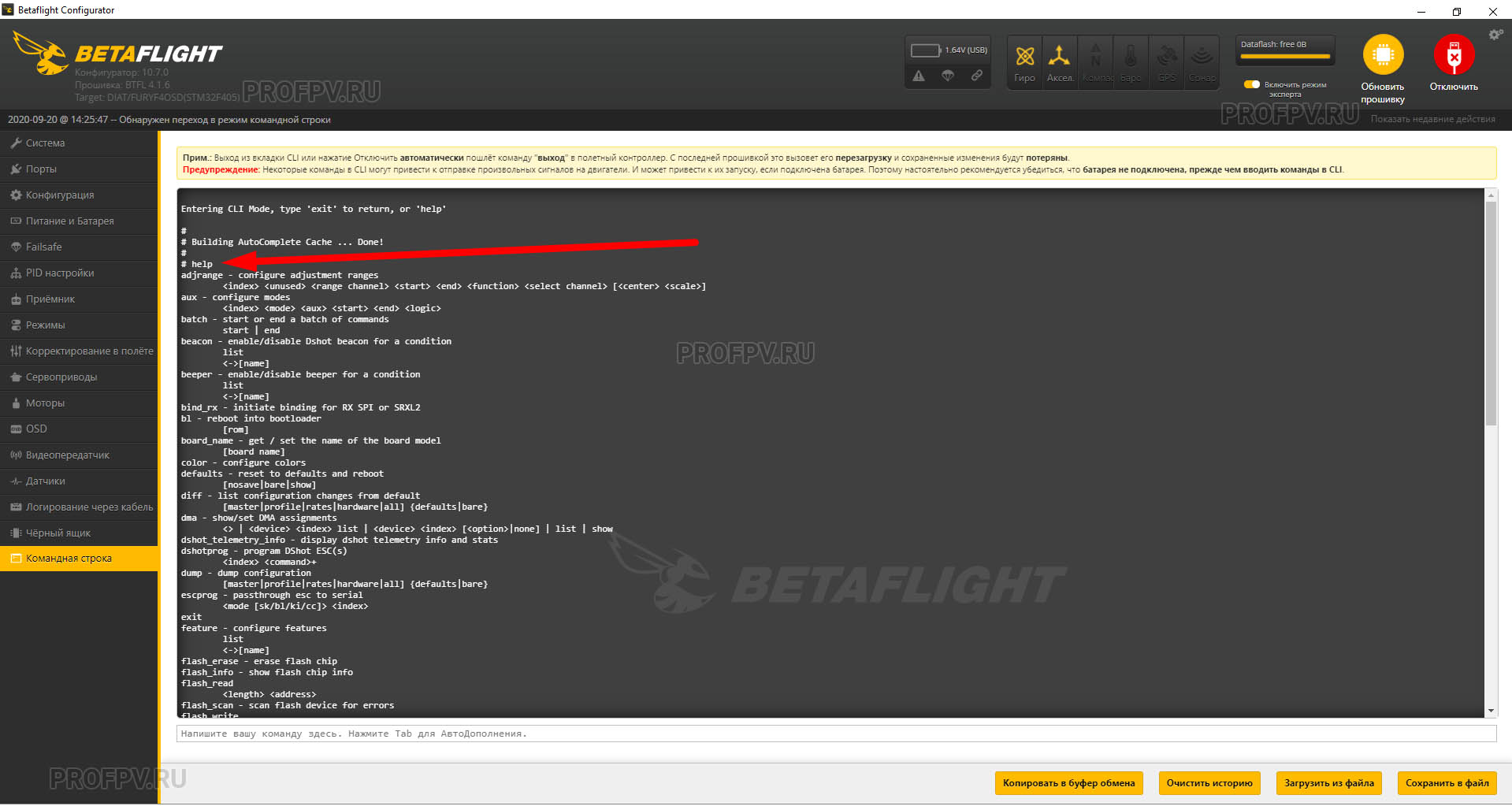
Командная строка (CLI)
Через командную строку можно влиять на какую-либо информацию в прошивке, вносить изменения, а также выводить информацию о каком-либо параметре или компоненте. Список команд большой и выводится по команде «help». Все рассказывать здесь не будем, так как у нас опять есть отдельная статья по командной строке, если вам интересно, то ссылка ниже.
Читайте также: CLI: командная строка Betaflight — как сделать бекап и посмотреть настройки, а также команды
Рекомендации: проверка безопасности
Перед установкой пропеллеров, рекомендую выполнить ряд проверок, чтобы избежать проблем перед полетом.
Проверить направление двигателей
Перейдите во вкладку «Моторы» и включите режим тестирования по кнопке «Я понимаю всю опасность»:
Теперь запустите моторы (надеюсь вы сняли пропеллеры?) и проверьте, в правильную ли сторону крутятся двигатели в соответствии с этой схемой:
Проверить загрузку процессора
Пока квадрокоптер подключен к Betaflight, посмотрите на нижний сайд-бар:

Если загрузка будет 95% и выше, то у вас будут проблемы во время полета, так как процессор перегружен и не будет успевать вовремя обрабатывать данные. Чтобы решить эту проблему, отключите некоторые функции или отключите разгон, если у вас контроллер F4. Но на современных полетных контроллерах такая проблема — большая редкость.
Проверить гироскоп
Перейдите во вкладку Система и и проверьте настройки гироскопа:
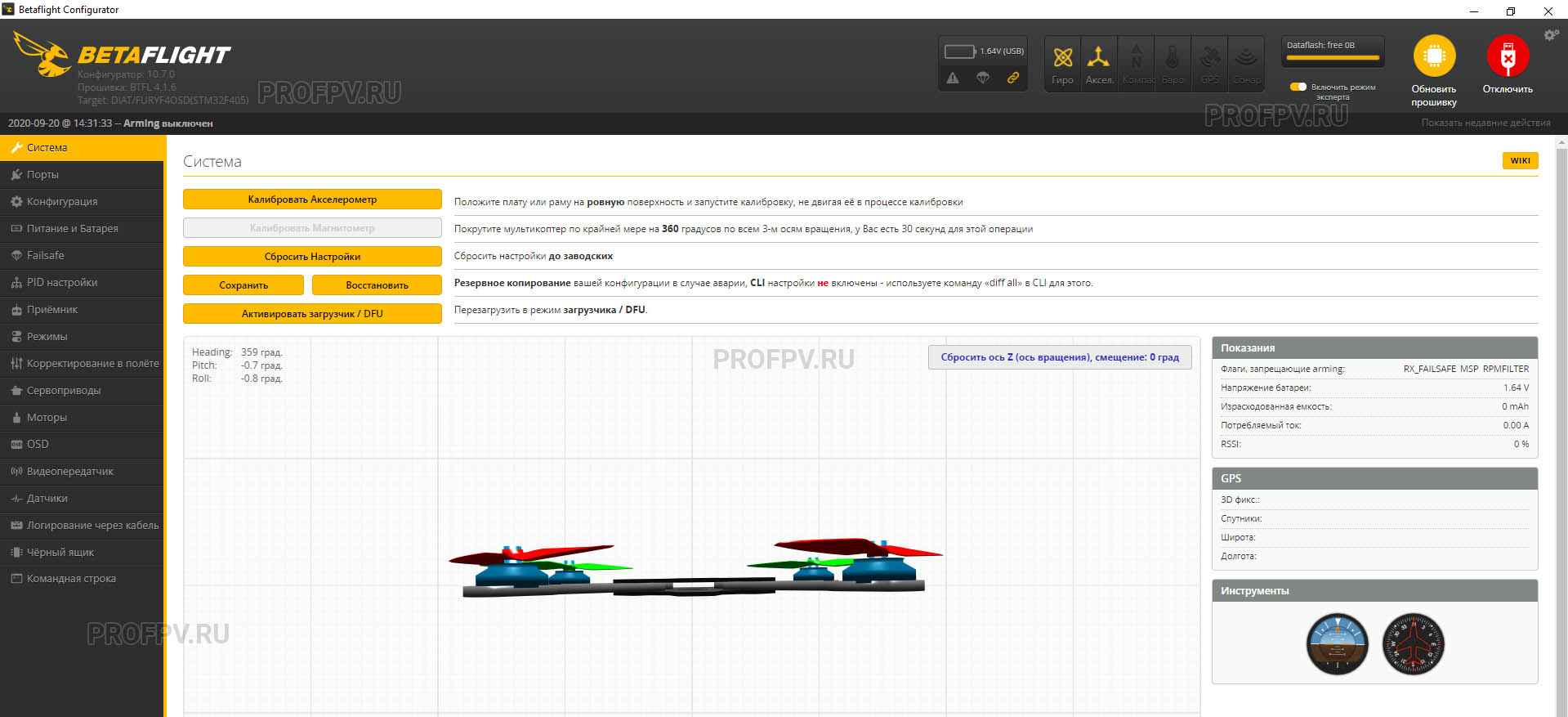
Возьмите квадрокоптер в руки и наклоняйте его во все стороны, ваши действия точь-в-точь должна повторять 3D модель на экране. Стрелка указывает на нос дрона. Если это не так, вернитесь в начало статьи, «Конфигурация», блок 2.
Кроме этого, после настроек и тем более прошивки, нужно калибровать акселерометр. Для этого, поставьте квадрокоптер на ровную поверхность и нажмите кнопку «Калибровать Акселерометр». В нашем случае, дрон стоит на неровной подставке и это сразу фиксирует датчик, показывая «Pitch: -0.7 град.».
Сделайте бекап настроек
О том, как быстро и правильно сделать бекап, читайте здесь: https://profpv.ru/kak-sdelat-bekap-nastroek-i-vosstano/
Читайте также: Как и где скачать Betaflight Configurator и BLHeli
Заключение
На этом все, надеемся, что вам было все понятно, потому что мы старались писать простым языком, не сильно вдаваясь в тонкости, а донести суть. Если мы что-то забыли дописать, пишите в комментариях. Если у вас возникают какие-либо проблемы, пишите на форуме, с радостью поможем: https://profpv.ru/forum/
Настройка прошивки Betaflight для FPV дронов
!!!! Далее FC — пилотный контроллер.
В этом руководстве я покажу, как настроить Betaflight и сконфигурировать полетный контроллер для первого полета после сборки FPV дрона. В программе множество опций, которые можно включать или изменять, и объяснение всех из них заняло бы часы. Поэтому в этом гайде я сосредоточусь только на основных настройках, необходимых для первого взлета.
Betaflight — это отличное открытое программное обеспечение для полетных контроллеров, разработанное специально для FPV дронов (и мультикоптеров в целом). Если вы новичок, ознакомьтесь с моим [обзором прошивок для полетных контроллеров](https://oscarliang.com/fc-firmware/#Betaflight).
Начало работы
Это руководство основано на Betaflight. Оно применимо, если ваш дрон соответствует следующим критериям:
- Это квадрокоптер (4 мотора)
- Ваш полетный контроллер совместим с Betaflight
- Вы используете цифровой приемник (например Crossfire, ExpressLRS, Tracer, Ghost и т.д.)
Перед началом обязательно снимите все пропеллеры в целях безопасности и убедитесь, что к VTX подключена антенна (работа VTX без антенны может привести к перегреву и повреждению).
Установка Betaflight Configurator
Betaflight Configurator — это программа, которую мы будем использовать для прошивки полетного контроллера и настройки Betaflight.
Скачайте последнюю версию Betaflight Configurator:
https://github.com/betaflight/betaflight-configurator/releases
Файлы установки доступны для следующих ОС:
| Операционная система | Имя файла |
| Windows (8, 10, 11) | betaflight-configurator-[версия]_win64-installer.exe |
| Mac OS X | betaflight-configurator_[версия]_macOS.dmg |
| Ubuntu, Debian | betaflight-configurator_[версия]_amd64.deb |
| Red Hat, Fedora, CentOS | betaflight-configurator-[версия].x86_64.rpm |
| Другие Linux | betaflight-configurator_[версия]_linux64-portable.zip |
| Android | betaflight-configurator-debug-[версия]_android.apk |
Перейдите в Options в левой панели и включите эти опции:
Обновление прошивки
Если вы приобрели полетный контроллер по [рекомендациям](https://oscarliang.com/flight-controller/), Betaflight уже должен быть предустановлен. Однако версия может быть устаревшей, поэтому всегда полезно обновляться до последней версии Betaflight для исправления ошибок и получения новых функций, хотя это и не обязательно. Это руководство проведет вас через [процесс прошивки Betaflight шаг за шагом].
Перед прошивкой полетного контроллера обязательно сделайте резервную копию текущей конфигурации — это позволит вернуться к исходному состоянию, если что-то пойдет не так (хотя такое случается крайне редко, лучше перестраховаться). Вот руководство по [резервному копированию настроек Betaflight](https://oscarliang.com/backup-restore-betaflight-config/).
Совет: Перед обновлением прошивки FC регулярно проверяйте и обновляйте Betaflight Configurator для получения новых функций и исправлений ошибок. Устаревший конфигуратор может быть несовместим с новой прошивкой.
Первичная настройка Betaflight
Для простоты мы настроим только основные параметры, необходимые для первого взлета. Вы сможете изучить другие настройки позже, если захотите.
Важно! Убедитесь, что все пропеллеры сняты перед настройкой дрона на стенде, чтобы избежать несчастных случаев.
Подключение FC к компьютеру
При подключении кабеля USB к FC он также обеспечит питание, подключать LiPo аккумулятор не нужно.
При подключении FC к компьютеру в Configurator должен появиться новый COM-порт. Выберите этот новый COM-порт и нажмите «Connect». Обратите внимание, что в примере у меня COM8, но в вашем случае он, скорее всего, будет другим. И часто COM-порт меняется при использовании другого полетного контроллера/компьютера.
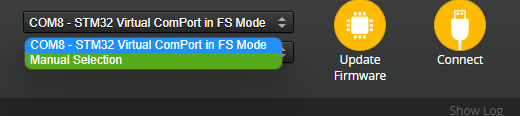
Подключение COM-порта
Если вы не можете найти COM-порт или возникли проблемы с подключением, это может быть связано с проблемой драйверов компьютера. Следуйте [этому руководству для устранения проблем с драйверами полетного контроллера](https://oscarliang.com/fc-driver-issues-flash-firmware/). Или, возможно, ваш FC «кирпич» (крайне редко), что можно [исправить, как объяснено в этой статье](ссылка).
Совет: Убедитесь, что вы используете USB-кабель для передачи данных. Существует два типа USB-кабелей: только для зарядки и для передачи данных. Для связи с Betaflight Configurator вам нужен кабель для передачи данных.
Настройка
После успешного подключения к Betaflight вы увидите вкладку Setup с 3D-моделью квадрокоптера. Здесь вы получите общий обзор состояния полетного контроллера и доступ к нескольким базовым функциям.
Здесь нужно сделать несколько вещей:
1. Поместите квадрокоптер/FC на ровную поверхность, затем нажмите «Calibrate Accelerometer» — это нужно делать только один раз после каждой прошивки.
2. Теперь двигайте квадрокоптер руками (наклоняйте вперед-назад, влево-вправо, вращайте и т.д.), 3D-модель должна повторять движения.
Если 3D-модель не двигается так же, как ваш квадрокоптер, это может означать несколько вещей: возможно, ваш FC перевернут или установлен не в том направлении (например, стрелка на FC не направлена вперед). Попробуйте повернуть плату, пока она не будет правильно ориентирована. Если физически невозможно повернуть пилотный контроллер относительно рамы коптера чтобы обеспечить правильность его ориентации в пространстве, вы можете попробовать установить положение магнитометра во вкладке Configuration / Конфигурация, чтобы исправить эту ошибку (обычно 90/180/270 градусов).
Предустановки
Перед внесением любых изменений всегда полезно сначала создать резервную копию текущих настроек. Вы можете сделать это во вкладке Presets / Предустановки. Подробнее о [резервном копировании и восстановлении настроек](https://oscarliang.com/backup-restore-betaflight-config/).
[Предустановки в Betaflight — о них можно узнать здесь](https://oscarliang.com/betaflight-presets/).
Калибровка напряжения
Возьмите аккумулятор, проверьте его напряжение с помощью тестера аккумуляторов или мультиметра.
Затем подключите его к дрону (предварительно снимите пропеллеры!). Если отображаемое напряжение в конфигураторе (обведено красным на изображении ниже) не совпадает с измеренным вами напряжением, следует откалибровать датчик напряжения в Betaflight.
Для этого перейдите на вкладку «Power & Battery» в левой панели.
Нажмите кнопку Calibration / Калибровка в правом нижнем углу.
Введите измеренное напряжение во всплывающем окне, затем нажмите Calibrate, и вам будет предложено применить новый масштаб напряжения. Вот и все.
Порты
Во вкладке Ports можно настроить все периферийные устройства (внешние устройства), подключенные к полетному контроллеру через UART (контакты TX и RX) или программный последовательный порт. Здесь мы хотим настроить подключения нашего приемника и VTX.
Здесь нужно сделать всего две вещи:
- Если вы
- используетеаналоговый VTX и подключили провод SmartAudio или IRC Tramp для [управления VTX](https://oscarliang.com/vtx-control/), выберите «VTX (TBS SmartAudio)» или «VTX (IRC Tramp)» в разделе Peripherals для того UART, к которому подключен VTX.
- используете HD VTX, такой как DJI / Avatar / HDZero, выберите VTX (MSP + Displayport), это также автоматически включит MSP.
- Если вы используете последовательный приемник, такой как ExpressLRS и Crossfire, вам нужно включить «Serial RX» на том UART, к которому он подключен.
- Если вы используете HD FPV систему, такую как DJI / Avatar / HDZero, есть дополнительный шаг. Вернитесь на вкладку Presets / Предустановки и примените пресет «OSD for Fpv.wtf, DJI O3, Avatar HD» (просто найдите «OSD for DJI»).
Этот пресет эквивалентен вводу следующих команд в CLI:
set osd_displayport_device = MSP
set vcd_video_system = HD
saveКонфигурация
Вкладка Configuration / Конфигурация содержит основные системные настройки. Большинство настроек можно оставить по умолчанию, изменить нужно лишь несколько параметров.
1. Системные настройки
Частота обновления гироскопа — это частота, с которой берутся показания гироскопа. Это значение зависит от того, какой у вас гироскоп, и обычно оно фиксировано, так что не беспокойтесь об этом.
Частота PID-цикла — также известная как время цикла (looptime), определяет, как быстро выполняются PID-вычисления. Максимальное значение зависит от мощности процессора вашего FC: как правило, F4 может работать до 4 кГц, а F7/H7 — до 8 кГц. Это также зависит от частоты обновления гироскопа: если у вас гироскоп BMI270, то максимальная поддерживаемая частота PID-цикла составит 3,2 кГц, даже для более быстрого FC F7.
Общее правило:
- F4: 4 кГц
- F7/H7: 4 кГц или 8 кГц
- Если у вас гироскоп BMI270: 3,2 кГц независимо от процессора
При изменении времени цикла и включении функций обращайте внимание на «загрузку ЦП» в нижней части окна — старайтесь держать ее ниже 75%, используя более медленное время цикла или отключая ненужные функции. Высокая загрузка ЦП может вызвать нестабильность работы полетного контроллера. 75% — это безопасный предел, рекомендуемый разработчиками Betaflight.
Я рекомендую оставить акселерометр включенным. Вы можете отключить его, это освободит некоторую вычислительную мощность, но вы не сможете использовать некоторые функции Betaflight, такие как Angle mode и Horizon mode, а также 3D-модель на вкладке Setup перестанет двигаться.
Вы также можете отключить барометр и магнитометр, если не используете их.
2. Конфигурация DShot Beacon / DShot писк
Обычно я включаю DShot Beacon — это позволяет использовать моторы в качестве звукового сигнала, когда дрон не взведен. Это полезно, если на вашем дроне нет зуммера — это поможет найти дрон после падения. Вам также нужно будет назначить переключатель на пульте для звукового сигнала на вкладке Modes, что я покажу позже.
3. Угол активации / Arming (Arming Angle)
Установка угла активации на 180 фактически отключает эту функцию, позволяя «заармить» квадрокоптер в любом положении (даже вверх ногами). Это полезно, если дрон застрял в дереве — вы все равно можете заармить квадрокоптер, запустить моторы и вытащить его из веток. Если этот параметр установлен слишком низко, вы можете не запустить дрон. Отключение акселерометра также отключит эту функцию.
Приемник
Во вкладке Receiver можно настроить и проверить, правильно ли работает ваш приемник.
Если вы используете приемники Crossfire и ExpressLRS необходимо выбрать «Serial (via UART)» в Receiver Mode / Режимы приемника.
В Serial Receiver Provider выберите соответствующий протокол приемника:
- TBS Crossfire — CRSF
- ExpressLRS — CRSF
- Tracer — CRSF
- Ghost — IRC GHOST
- Spektrum DSM2 — SPEKTRUM1024
- Spektrum DSMX — SPEKTRUM2048
- FrSky RX — SBUS
- Futaba RX — SBUS
- FlySky RX — IBUS
- Turnigy RX — IBUS
Если вы подключаете приемник к FC через PPM, используйте «PPM RX Input» в Receiver Mode.
Если вы используете телеметрию, обязательно включите Telemetry Output.
Включите пульт (TX) и приемник (RX) — если они уже связаны, при движении стиков значения каналов также должны изменяться. Если реагируют не те каналы, возможно, вам нужно изменить «Channel Map» — обычно это должно быть либо AETR1234, либо TEAR1234.
Дополнительная информация: [Что такое Channel Map и как правильно его настроить?](https://oscarliang.com/channel-map/)
Если каналы не реагируют на движения стиков, вот как это исправить:
- связан ли приемник с передатчиком? (горит ли на приемнике постоянный зеленый свет?)
- правильно ли приемник припаян к FC?
- включили ли вы последовательный приемник на правильном UART?
- выбрали ли вы правильный протокол приемника?
Убедившись, что каналы работают правильно, проверьте средние точки и конечные точки первых 4 каналов (Pitch, Roll, Yaw, Throttle). Когда вы убираете руки со стиков, каналы Pitch, Roll и Yaw должны быть на 1500. Некоторые приемники могут иметь небольшие колебания, например, около 1498-1502, что нормально, и вы можете исправить это, установив мертвую зону для этой оси. У вас должны быть конечные точки 1000 и 2000 (допустима небольшая погрешность, например, 8-12 за пределами лимитов, например, 988 и 2012 — нормально).
Если ваши средние и конечные точки сильно отклоняются, вы можете следовать моему руководству, чтобы исправить это: [https://oscarliang.com/adjust-tx-channel-mid-end-point/](https://oscarliang.com/adjust-tx-channel-mid-end-point/).
Прежде чем перейти к следующей вкладке, убедитесь, что переключатели взведения и режимов работают правильно, переключая их — вы должны видеть изменение значений каналов AUX1, AUX2 или AUX3. Если вы еще не настроили переключатели на пульте, [следуйте этому руководству](https://oscarliang.com/setup-switch-mixes/).
Что такое пороги Stick Low/High?
Stick Low Threshold: Дроссель должен быть ниже этого значения, чтобы FC распознал, что стик дросселя полностью опущен. Это полезно по нескольким причинам, например, когда вы поднимаете стик дросселя, ваш квадрокоптер не взводится. Такие настройки, как PID_Min_Throttle, также используют значение Stick Low Threshold.
Stick Center: Это значение всегда должно быть установлено на 1500.
Stick High Threshold: Это значение используется для определения, полностью ли поднят стик дросселя. Оно полезно для таких функций, как активация меню OSD.
Важно отметить, что пороги Stick Low/High Threshold — это не то же самое, что конечные точки стиков, и они не влияют на диапазон стика дросселя.
Не устанавливайте Stick Low Threshold на самое нижнее значение 1000, так как это может помешать взведению вашего квадрокоптера. Рекомендуется оставить запас, даже если ваш дроссель может опускаться ниже 1000, например, установить его на 1010. Однако оставить его по умолчанию на 1050 обычно нормально. Для Stick High Threshold оставьте его по умолчанию на 1900 — это приемлемо, так как это не влияет на ваш полет.
Режимы / Modes
Во вкладке «Modes / Режимы» вы можете назначить переключатели для различных функций.
Обычно мы используем следующие режимы:
- Арминг (Arming)
- Режим Angle (когда режим Angle не активирован, мы находимся в режиме Rate, он же ручной режим. Если вы не видите режим Angle, вероятно, ваш акселерометр отключен)
- Звуковой сигнал (Beeper)
- Переворот после падения (режим Turtle)
Я объясняю [различные режимы в Betaflight в этой статье](https://oscarliang.com/betaflight-modes/).
Вот как назначить переключатель на режим:
- Нажмите «Add Range» для нужного режима
- Выберите переключатель, который вы хотите использовать для управления этим режимом, в выпадающем меню. Если вы не знаете, какой AUX соответствует вашему переключателю, просто перейдите на вкладку Receiver и посмотрите, какие каналы AUX реагируют при переключении. AUX1 — это канал 5, AUX2 — канал 6 и так далее
- Перетащите ползунок на желаемый диапазон активации
- Переключите переключатель, и маленький желтый маркер также должен перемещаться — убедитесь, что он попадает в диапазон активации режима, когда переключатель включен
- Нажмите «Save«
Моторы
Вкладка Моторы / Motors используется для настройки ESC и тестирования моторов. В целях безопасности убедитесь, что все пропеллеры сняты перед использованием вкладки Моторы / Motors.
Единственное, что нужно изменить здесь — это протокол ESC/Motor. Если вы используете ESC BLHeli_S или BLHeli_32, рекомендуется DShot. Как правило, выбирайте:
- DShot600 для времени цикла 8 кГц
- DShot300 для 3,2 кГц / 4 кГц
- DShot150 для 1,6 кГц / 2 кГц
> Дополнительная информация: [Обзор протоколов и прошивок ESC](https://oscarliang.com/esc-firmware-protocols/)
Я рекомендую оставить опцию «MOTOR_STOP» отключенной, иначе вы не сможете определить, заармлен ли ваш квадрокоптер. Остальные параметры можно оставить по умолчанию.
Нажмите Save and Reboot, затем снова вернитесь на вкладку Моторы / Motors.
Есть несколько вещей, которые нужно проверить:
- Могут ли моторы вращаться?
- Правильный ли порядок моторов, как показано на схеме в верхнем левом углу?
- Правильное ли направление вращения, как показано на схеме в верхнем левом углу?
Вот правильный порядок моторов и направление вращения:
- мотор 1 — задний правый
- мотор 2 — передний правый
- мотор 3 — задний левый
- мотор 4 — передний левый
Если порядок неправильный, вы можете исправить его, нажав «Reorder Моторы / Motors«.
Теперь проверьте направление вращения моторов — если оно неправильное, вы можете изменить направление вращения, нажав «Motor direction«.

OSD
Теперь перейдите на вкладку OSD в левой панели.
Если вы используете системы DJI / Avatar / HDZero FPV, обязательно переключитесь на формат HD video — это правильно масштабирует шрифт и экран, и изображение будет выглядеть намного лучше.
Для аналоговых систем просто выберите Auto (или PAL/NTSC, если вы знаете, какой тип камеры у вас установлен).
Вот как выглядит OSD в ваших очках.
Настроив OSD, вы можете отображать важные данные полета на экране, такие как напряжение и таймер. Подробнее см. в моем [руководстве по настройке OSD в Betaflight](https://oscarliang.com/betaflight-osd/), но если вы следовали этому руководству, вам не нужно делать ничего дополнительного.
Вместо того чтобы размещать одни и те же элементы OSD для каждого своего квадрокоптера, я обычно просто копирую и вставляю следующий фрагмент кода в CLI — это намного быстрее. Вот что я обычно использую на своем фристайл-квадрокоптере (без GPS):
set osd_vbat_pos = 2467
set osd_link_quality_pos = 2114
set osd_rssi_dbm_pos = 2082
set osd_tim_2_pos = 2486
set osd_throttle_pos = 2104
set osd_current_pos = 2135
set osd_mah_drawn_pos = 2403
set osd_warnings_pos = 14633
set osd_avg_cell_voltage_pos = 2435
saveНастройка PID
Вкладка PID Tuning позволяет настроить летные характеристики вашего квадрокоптера так, как вам нужно.
Это может показаться сложным, но на самом деле здесь не нужно ничего менять, так как настройки Betaflight по умолчанию хорошо работают на широком спектре FPV дронов. Когда вы станете более опытным, ознакомьтесь с моим [руководством по настройке PID](https://oscarliang.com/fpv-drone-tuning/).
Однако вы можете поэкспериментировать с rates и expo, чтобы сделать управление квадрокоптером более удобным. Rate, Super Rate и Expo влияют на чувствительность стиков — насколько сильно квадрокоптер реагирует на движение стиков. Ознакомьтесь с [этим руководством о том, что такое rates и expo и как их настроить](https://oscarliang.com/rates/).
Видеопередатчик
Если вы используете аналоговый видеопередатчик и хотите изменять канал и мощность в меню OSD, вам следует настроить таблицу VTX. Это не относится к цифровым FPV системам (DJI/HDZero/Avatar).
Есть 3 способа загрузить таблицы VTX:
1. выбрать пресет таблицы VTX во вкладке Presets
2. загрузить JSON-файл во вкладке Video Transmitter
3. вставить фрагмент кода в CLI (мой предпочтительный способ)
Обычно вы можете найти JSON-файл таблицы VTX или фрагмент CLI для вашего конкретного VTX на странице продукта, [если нет, вы можете проверить здесь](https://oscarliang.com/smartaudio-tramp-vtx-control-vtxtables/) или просто поискать в Google.
Экспертный режим
Включив Expert Mode в верхней части окна, вы получите доступ к дополнительным вкладкам на левой панели и расширенным настройкам. Однако для первого полета обычно не нужно изменять какие-либо из этих настроек.
Отключение звукового сигнала на стенде
Если ваш дрон продолжает пищать при подключении USB-кабеля (когда пульт выключен), простое решение — отключить опцию «USB» в разделе Beeper Configuration во вкладке Configuration.
Это все, что касается базовой настройки в Betaflight.
Проверки безопасности перед первым полетом
Перед первым полетом обязательно протестируйте failsafe. При потере радиосвязи моторы должны просто остановиться, а дрон упасть на землю. Вы же не хотите, чтобы пропеллеры вращались бесконтрольно, что может привести к еще большему ущербу.
Вот как протестировать failsafe.
Прежде всего, снимите все пропеллеры в целях безопасности. Подключите аккумулятор, включите пульт и произведите арминг квадрокоптера — моторы должны вращаться на низкой скорости.
Чтобы имитировать failsafe, можно просто выключить пульт, пока квадрокоптер еще активирован. В идеале ваш квадрокоптер должен деактивироваться в течение секунды, и моторы должны остановиться. Если этого не происходит, [вам нужно пересмотреть настройки failsafe](https://oscarliang.com/setup-failsafe/) и сбросить их на значения по умолчанию, если есть сомнения.
Также проверьте процент загрузки ЦП в нижней части Betaflight Configurator — относительно низкая загрузка ЦП обеспечивает стабильность. Согласно wiki Betaflight, вам не стоит беспокоиться, пока загрузка ЦП не достигнет примерно 75%. Чтобы снизить загрузку ЦП, вы можете попробовать отключить ненужные функции или установить более низкую частоту PID-цикла.
## Другие руководства по Betaflight
После завершения этого руководства ознакомьтесь со следующими руководствами, чтобы узнать больше о расширенных функциях Betaflight:
— [Объяснение CLI] Командная строка в Betaflight
— [Настройка RGB LED ленты](https://oscarliang.com/setup-led-betaflight/)
— [Переназначение ресурсов](https://oscarliang.com/betaflight-resource-remapping/)
— [Настройка Failsafe](https://oscarliang.com/setup-failsafe/)
— [OSD в Betaflight](https://oscarliang.com/betaflight-osd/)
— [Управление VTX](https://oscarliang.com/vtx-control/)
— [Программный последовательный порт](https://oscarliang.com/betaflight-soft-serial/)
— [Скрипт LUA](https://oscarliang.com/betaflight-change-pid-vtx-settings-taranis/)
— [Телеметрия ESC](https://oscarliang.com/esc-telemetry-betaflight/)
— [Управление камерой](https://oscarliang.com/fpv-camera-control-uart-fc/)
— [Режим GPS Rescue](https://oscarliang.com/setup-gps-rescue-mode-betaflight/)
— [Фильтры](https://oscarliang.com/betaflight-filtering/)
— [Порог Moron]
— [Режим Airmode в Betaflight](https://oscarliang.com/betaflight-airmode/)
— [Как использовать Blackbox](https://oscarliang.com/blackbox/)
1023
Основы настройки полетного контроллера
Что такое полетный конфигуратор?
Полетный конфигуратор — это программа, которая позволяет получить доступ к полетному контроллеру, всем его датчикам и настройкам. Мы будем использовать Betaflight. Почему нельзя просто подключить все к полетному контроллеру (ПК), и сразу полететь без настройки? Да потому что ПК рассчитан на разные виды и размеры коптеров, и под них нужны разные настройки. Настройкой ПК под ваш дрон мы и будем заниматься, используя Betaflight.
Последовательность настройки
Настройка аппаратуры и режимов
1 Установка программы
Сначала убедитесь в том, что программа уже не установлена на вашем компьютере.
Скачиваем программу по этой ссылке:
PUSH ME
Устанавливаем
Запускаем скачанный файл. Даем разрешение на его установку. Жмем далее, ждем конца установки
Запускаем
- На рабочем столе должен появиться значок Betaflight configurator
ОБЯЗАТЕЛЬНО СНИМИТЕ ПРОПЕЛЛЕРЫ
перед настройкой
Прошивка необходима только в том случае, если конфигуратор «не видит» полетный контроллер (ПК). Если же при подключении ПК, программа показывает его состояние и настройки, прошивать не нужно.
Для начала нам необходимо запустить полетный контроллер в режиме загрузки. Для этого надо замкнуть 2 контакта с надписью «BOOT», и подключить контроллер к компьютеру с помощью USB кабеля.
После запуска программы, откройте вкладку «Программатор». Выберете модель своего полетного контроллера и последнюю доступную версию прошивки. Установите 3 флажка как показано на скриншоте. Затем нажмите «Загрузить прошивку [Online]»
После скачивания прошивки на компьютер программа должна показать версию и описание прошивки. Теперь жмем «Прошить прошивку». Ждем.
Если все прошло успешно. То при подключении к полетному контроллеру (Кнопка подключения находится в верхнем правом углу) Betaflight должен показывать вот такое окно.
Калибровка регуляторов необходима для правильной и синхронной работы двигателей. С помощью BlHeli Configurator мы сможем настроить минимальный и максимальный уровень газа для каждого двигателя. Возможности конфигуратора позволяют также менять направление вращения моторов.
Перед настройкой нужно убедиться, что ваши регуляторы поддерживают BlHeli
-
Как правило на каждом регуляторе есть этикетка. На ней и должна быть соответствующая маркировка. Она может выглядеть так ——>
-
Или так. Просто найдите надпись «BLHeli». Или поищите характеристики модели в гугл.
Если ваш регулятор поддерживает BlHeli, то:
Распаковываем
Установка этой программе не требуется. Просто разархивируем ее в удобное место. Например на рабочий стол.
Запускаем
- Открываем папку с программой. Находим blheli-configurator.exe. Запускаем.
ОБЯЗАТЕЛЬНО СНИМИТЕ ПРОПЕЛЛЕРЫ
перед настройкой
(иначе будет смешная нарезка школьников)
После запуска программы подключаем аккумулятор к коптеру, затем подключаем коптер к компьютеру. Жмем на кнопку подключения в правом верхнем углу. После подключения нажимаем «Read Setup», чтобы прочитать настройки регуляторов.
Параметры минимального и максимального газа должны совпадать для всех 4х регуляторов. Если они не совпадают — передвигайте поводки настройки, изменяя значение. Когда все значения совпадут, нажмите «Write Sutup», для записи настроек.
4 Настройка аппаратуры и режимов
ОБЯЗАТЕЛЬНО СНИМИТЕ ПРОПЕЛЛЕРЫ
перед настройкой
В первую очередь нужно перейти во вкладку Ports. В ней нам необходимо включить Serial Rx на UART3. Это делается для включения передачи сигнала с приемника к полетному контроллеру. Не забываем нажать Save and Reboot, для сохранения настроек.
Не пугайтесь. Тут все просто. Для начала сверим, так ли у нас стоят моторы. Потом включим ONESHOT125 (или другой, если у вас не стандартный регулятор). Затем установим частоту проверок на 4 и 2 Кгц, чтобы не грузило процессор. И на всякий случай отключим барометр и компас (магнитометр). Если что, на скрине они включены. -> Save and Reboot в конце.
Тут ничего менять не надо, если все работает. Эта вкладка нам нужна только для проверки работы пульта и соответствия осей управления (yaw/roll/pitch). На всякий случай у вас есть карта каналов там можно исправить ошибки соответствия просто переставив буквы и цифры местами.
Пиды — вещь крайне полезная, но не простая. Если вдруг ваш коптер слишком резко реагирует на управление, попробуйте изменить RC Rate и посмотреть какой вариант настроек лучше. Кривая помогает визуализировать процесс настройки. Ничего не понятно? Тогда не трогайте, и скрольте ниже.
Во вкладке Modes настраиваем арминг и режимы полетов. ARM — это включение и выключение движков с помощью переключателя на пульте. Полетный режим ANGLE помогает держать дрон ровно относительно горизонта. Пока вы не научились им управлять как профи, это должно помочь.
Перейдем во вкладку Motors. Помните, никаких пропеллеров на двигателях быть не должно! Для их проверки нужно переключить маленький выключатель безопасности внизу, а затем прибавить газ ползунком слева.
Во вкладке Setup мы можем посмотреть все ли у нас правильно откалибровано. Движения виртуального коптера должны соответствовать движениям реального, когда вы его наклоняете и крутите. Если что-то не так, всегда можно посмотреть ошибки, и попытаться загуглить проблему.
Ну вот и всё! Можно крепить пропеллеры и пытаться взлететь на только что собранном коптере. Удачи, и не забывайте, что все полеты только в сетке!
Контакты:
надо лудить перед пайкой!
+7 (3822) 609-826 – администратор
+7 (3822) 609-853 – приемная
quant@quantorium70.ru – администратор
quantorum.tomsk@mail.ru – приемная
634034, г. Томск, пр. Ленина, 26
Содержание
- 1 Описание
- 1.1 Важно!
- 2 Установка Betaflight Configurator
- 2.1 Через интернет-магазин Chrome
- 2.2 Вручную
- 2.3 Полезное
- 3 Настройка коптера в Betaflight Configurator
- 3.1 Настройка пульта
- 3.2 Setup
- 3.3 Ports
- 3.4 Configuration
- 3.4.1 Mixer
- 3.4.2 Board and Sensor Alignment
- 3.4.3 Receiver Mode
- 3.4.4 ESC/Motor Features
- 3.4.5 Battery Voltage
- 3.4.6 Other Features
- 4 FAQ
- 4.1 В среднем положении стиков коптер дёргается
- 4.2 Значения стиков в среднем положении прыгают вокруг 1500
- 5 Ссылки
- 6 См. также
Описание [править]
Betaflight Configurator — конфигуратор, мультиплатформенное программное обеспечение для настройки различных ЛА (квадракоптеров, гексакоптеров, октокоптеров и разного рода самолётов) под управлением полётных контроллеров, работающих на прошивке BetaFlight.
Можно сказать, что Betaflight Configurator — это новый этап в жизни прошивки BetaFlight. Дело в том, что по мере своего развития BetaFlight всё больше отдалялся от CleanFlight и интерфейс его конфигуратора становился всё более бесполезным, так как всё больше настроек делалось через консоль CLI.
Betaflight Configurator работает в виде приложения в среде Google Chrome. Установить Скачать
Важно! [править]
Для правильной работы конфигуратора требуется, чтобы в полётный контроллер была «залита» самая свежая прошивка BetaFlight (соответствующая версии конфигуратора). И тут есть два важных нюанса:
- Приложение Betaflight Configurator в браузере Chrome обновляется автоматически.
- При обновлении прошивки сохранённые в полётном контроллере ваши настройки могут нарушиться.
Поэтому настоятельно рекомендуется сохранять резервную копию настроек.
Установка Betaflight Configurator [править]
Через интернет-магазин Chrome [править]
- Запустить браузер Google Chrome (предварительно установив, если не установлен) или Chromium
- Перейти на страницу приложения Betaflight Configurator
- Нажать кнопку «+ Установить»
Вручную [править]
- Сохранить репозиторий в локальной папке (например, D:\betaflight-configurator) или скачать его в виде ZIP-файла.
- В Chromium или Google Chrome выбрать в меню Дополнительные инструменты -> Расширения (Tools -> Extension)
- Включить чекбокс «Режим разработчика» («Developer mode»).
- Нажать кнопку «Загрузить распакованное расширение…» («Load unpacked extension…») и указать папку, где лежит конфигуратор (например, D:\betaflight-configurator).
После завершения установки пиктограмма Betaflight Configurator появится в Chrome в списке приложений на странице «Сервисы» («Apps») по адресу chrome://apps/
Вид приложения:
Полезное [править]
- Включите WebGL. Для лучшей производительности приложения включите в браузере Chrome в меню «Настройки -> Показать дополнительные настройки -> Система» чекбокс «Использовать аппаратное ускорение (при наличии)» (Use hardware acceleration when available).
Настройка коптера в Betaflight Configurator [править]
Те настройки, которые обязательно нужно сделать, а также советы и рекомендации.
Настройка пульта [править]
Необходимо проверить минимальные, средние и максимальные значения сигналов всех 4-x стиков пульта в конфигураторе. Делается это во вкладке Receiver. Идеальные значения составляют 1000 — 1500 — 2000. Отклонения, даже самые минимальные (+/- несколько единиц), от этих значений крайне нежелательны, особенно от центрального положения (1500), которое полётный контроллер будет воспринимать как лёгкое подруливание, которое он будет обрабатывать и квадрокоптер постоянно будет сносить в какую-то сторону. Поэтому крайне желательно уделить время и при помощи доступных настроек пульта добиться идеальных значений.
Примеры:
- Видео по настройке крайних и средних значений стиков пульта FrSky TARANIS
- Turnigy 9XR PRO — настраивается в пункте меню Limits. Также можно выполнить настройку через программу eePskye (вкладка Limits), но это неудобно, так как результат сразу не видно в Betaflight Configurator. Сделать это необходимо для каждого из четырёх каналов управления.
Общую информацию по настройке пультов см. в отдельно статье: Принципы настройки пультов Turnigy и Taranis
См. также решение проблемы «дрожания» среднего значения.
Далее, по вкладкам Betaflight Configurator:
Setup [править]
Тут нужно откалибровать акселерометр.
Ports [править]
Рекомендации:
- При использовании OSD следует включить MSP для порта UART2.
- Ни в коем случае нельзя отключать MSP для порта UART1.

Configuration [править]
Mixer [править]
Тут выбрать (а в большинстве случаев — оставить по умолчанию) конфигурацию коптера, заодно ещё раз проверив расположение и направление вращения моторов/пропеллеров.
Board and Sensor Alignment [править]
Если полётный контроллер, уже установленный на раму коптера, «смотрит» не в ту сторону, как указано на схеме в Mixer (направление стрелки на плате/корпусе полётного контроллера не совпадает с направлением стрелки на схеме), то тут можно указать куда и насколько он оказался повёрнут.
Корректность этих настроек можно будет потом проверить во вкладке Setup.
Receiver Mode [править]
Выбор типа (сигнала) используемого приёмника.
- RX_PPM — композитный PPM-сигнал, самый популярный тип многоканального управляющего сигнала, передаваемого по одному сигнальному проводу.
- RX_SERIAL — последовательный управляющий канал (SBus, SumD или сателлит Spektrum).
- RX_PARALLEL_PWM — «обычный», параллельный способ подключения: каждый канал по отдельному проводу с PWM-сигналом.
- RX_MSP — управление через MSP-порт.
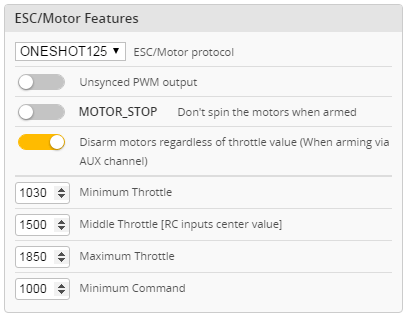
ESC/Motor Features [править]
- Unsynced PWM output — рекомендуется отключить, если не используется MULTISHOT.
- MOTOR_STOP — отключить, если нужно, чтобы моторы всегда вращались в заармленном состоянии.
- Minimum Throttle — регулирует обороты на «холостом ходу» (при стике газа в нуле), подбирается опытным путём. Все моторы должны уверенно держать минимальные обороты.
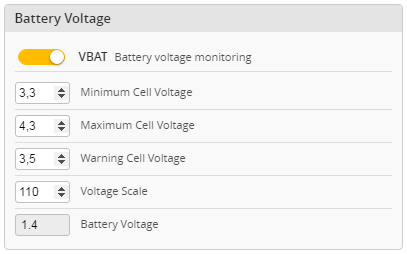
Battery Voltage [править]
VBAT — активация индикатора заряда батареи
Остальные параметры — показания заряда аккумулятора «на банку» для различных уровней индикации. Если в них есть погрешность, её можно убрать настройкой Voltage Scale.
Other Features [править]
- INFLIGHT_ACC_CAL — включение опции калибровки акселерометров (если они есть) по горизонту во время полёта.
- SERVO_TILT — управление наклоном камеры сервомашинкой (если она есть).
- SOFT_SERIAL — ?
- SONAR — включение ультразвукового датчика высоты (сонара).
- TELEMETRY — выход телеметрии.
- 3D — 3D-режим, с возможностью инверсного полёта, «вверх ногами» (если регуляторы моторов поддерживают реверс вращения).
- LED_STRIP — включение светодиодной подсветки.
- DISPLAY — поддержка подключаемого к полётному контроллеру ЖК-экрана.
- BLACKBOX — включение функции BlackBox.
- CHANNEL_FORWARDING — трансляция сигналов дополнительных каналов приёмника на управляющие выходы полётного контроллера.
- TRANSPONDER — использование бортового транспондера на оборудованном гоночном треке.
FAQ [править]
В среднем положении стиков коптер дёргается [править]
Значения стиков в среднем положении прыгают вокруг 1500 [править]
Это следствие и причина — одна и та же проблема. Для её решения в BetaFlight (и CleanFlight тоже) есть специальная команда, настраивающая фильтрацию подобной проблемы.
set deadband = 6
Значение может быть от 0 до 32 и с его повышением чувствительность управления снижается. Управление становится более мягким. Надо понимать, что после определённого порога мягкость превратится в «ватность», поэтому следует выбирать минимальное значение, при котором дёрганья исчезнут.
Ссылки [править]
- Приложение Betaflight Configurator в интернет-магазине Chrome.
- Betaflight Configurator на гитхабе.
- BetaFlight
См. также [править]
- CleanFlight Configurator — конфигуратор, на основе кода которого сделан Betaflight Configurator.